
- 1想用电脑远程控制手机?两款软件可以轻松做到,还能双向语音!
- 25分钟教你用AI把老照片动起来,别再去花49块9的冤枉钱了_可灵让图片动起来
- 3C会区块链论文速读-TrustCom 2023(5/6)大语言模型和区块链如何结合?_trustcom会议 深度学习可以投吗
- 4IDEA项目上传码云包括git公钥使用_idea git设置公钥
- 5Unity 安卓升级目标API 34_unity api34
- 6Java中String的split函数的详解及应用_string.split()方法详解
- 7Java 基础常见面试题大全_java基础面试
- 8yolov5从英伟达平台移植到华为昇腾开发板上的思路_华为昇腾 yolo
- 9Ineffective mark-compacts near heap limit Allocation failed - JavaScript heap out of memoy
- 10传智播客 .NET面试宝典(2015版)_主, 很久没有看直播了哦~ 去看直播 公会 yy领红包 下载手机yy语音直播不卡顿 y...
在matlab中使用A*算法进行二维路径规划_a* matlab
赞
踩
首先指路博主慕羽★的博客:详细介绍用MATLAB实现基于A*算法的路径规划(附完整的代码,代码逐行进行解释)(一)--------A*算法简介和环境的创建_a*算法路径规划matlab_慕羽★的博客-CSDN博客
非常感谢博主的分享和解惑,在他的代码基础上我添加了可斜向拐弯(同时避免触碰到障碍物尖角)等功能,但也去除了音乐播放等功能。基于他的算法思路,将算法从二维拓展到三维环境中进行路径规划,以下将分别进行阐述,代码基本都有注释,少量参数设置将稍加说明。
一、算法改进
1、将每次可从四方向拓展改进为八方向拓展,即可斜向拓展
首先将储存方向的数组初始化,添加右上、左上、右下、左下四个方向,并分别定义为'RD','LD','RU','LU'。
movementdirections = {'R','L','D','U','RD','LD','RU','LU'}; %移动方向,增加右上、左上、右下、左下四个方向在findvalue函数中,将原有的四方向增加为八方向,并根据之前定义的每个方向的含义编写代码。再根据该函数的写法,补充路径溯回函数findWayBack()等。
2、增设了参数getDistance_h,用来选择是否使用欧几里得距离
若设为0,则启发式函数h(n)使用对角公式,若设为1,则使用欧几里得距离公式,可用来对比启发函数用欧几里得距离或是对角距离的区别。同样地,若要对比另两种启发函数的区别,只需要更改heuristic()后的式子即可。
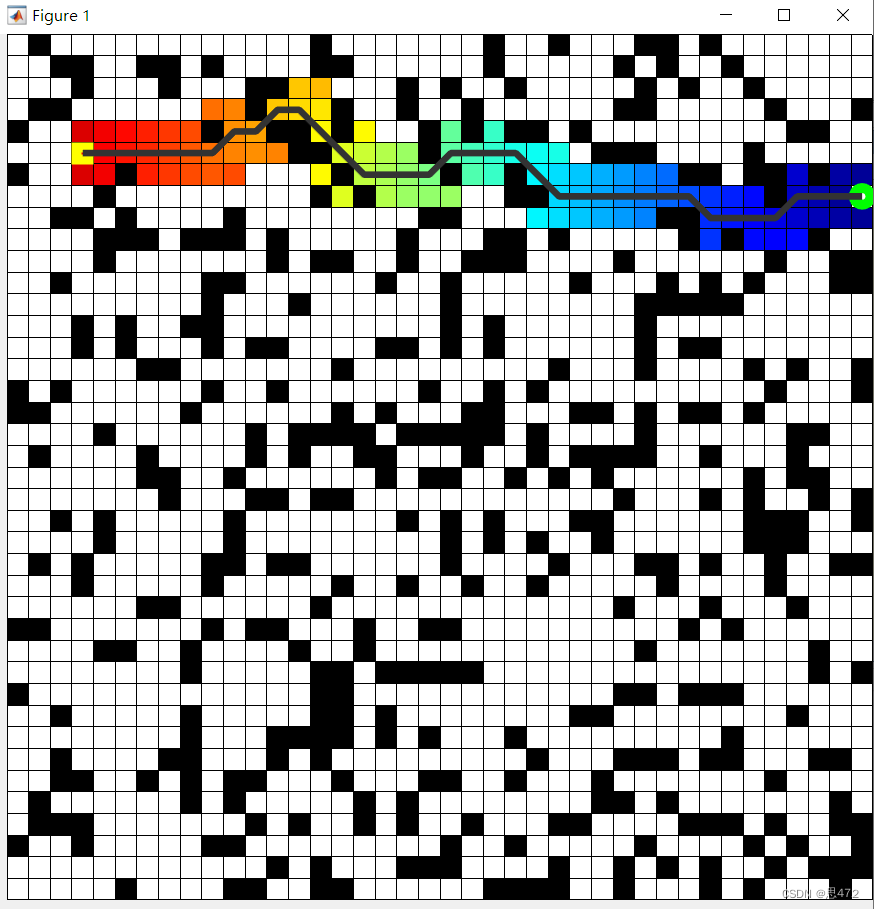
当完成方向拓展后,运行结果如下:发现规划出来的路线可能会经过障碍物的四个角落,如左下图。因此增设参数Corner_obstacles,在计算斜向拓展代价时,判断垂直其拓展方向的两侧有没有障碍物,如向父节点左上方拓展时,需判断父节点的左方以及上方是否有障碍物,若有则不能拓展,以此获得不触碰障碍物四角的安全路线,如右下图。

3、增设直角拐弯代价参数quarter_turn
考虑无人机等在进行直角拐弯时,速度会受到影响,进而增加耗能,因此增设参数quarter_turn表示每一次直角拐弯的代价,使规划的路径尽可能减少直角拐弯的次数,也使的路径更加圆滑。
-
- %%功能参数的设定部分
- n = 40; % 产生一个n x n的方格,修改此值可以修改生成图片的方格数
- wallpercent = 0.3; % 这个变量代表生成的障碍物占总方格数的比例 ,如0.5 表示障碍物占总格数的50%
- Weights=2; %动态衡量启发式A星算法中的h(n)权重系数
- quarter_turn=10; %直角转弯一次需要消耗的代价参数,
-
- Corner_amend=0; %选择是否进行拐角的修正,该变量设为0则不进行拐角修正,设为1则进行拐角修正
- Environmental_Set=0; %这个参数用来选择是否随机生成障碍物,若设定为0,则使用上一次创建的环境信息,若设定为1,则重新随机生成障碍物
- heuristicmethod=1; %这个参数用来选择是否使用欧几里得距离,若设为0,则启发式函数h(n)使用对角公式,若设为1,则使用欧几里得距离公式
- eight_directions=1; %这个参数用来选择是否可以斜向拓展,若设为0,则只能向四周4个方向拓展,若设为1,则可以向四周8个方向拓展
- Corner_obstacles=1; %这个参数用来选择是否关注障碍物的四角,若设为0,则忽略障碍物的四角,若设为1,则不能穿越障碍物的四角
- Reset_GS=0; %这个参数用来选择是否重新设定起始点和终止点,若设定为1,开始重新设定起始点和终止点,同时需要将变量New_goalposind和New_startposind的值修改为你所选择的起始点和终止点的索引值,设为0则关闭
- New_startposind=380; New_goalposind=270; %若将Reset_GS设定为1,则需要将变量New_goalposind和New_startposind的值修改为你所选择的起始点和终止点的索引值,要确保新设的这两个点处没有障碍物
-
-
- %用来存放规划的路径的长度
- Road_Long=0;
- %用来存放拐弯次数
- turn_count=0;
-
-
- % 路径规划中用到的一些矩阵的初始化
- setOpen = [startposind]; setOpenCosts = [0]; setOpenHeuristics = [Inf];
- setClosed = []; setClosedCosts = [];
- movementdirections = {'R','L','D','U','RD','LD','RU','LU'}; %移动方向,增加右上、左上、右下、左下四个方向
-
- %初始化一些进行路径的修正需要用到的变量
- Parent_node=0; %Parent_node初始化,否则会报错
- Expected_note=0;%Expected_note初始化,否则会报错
- untext_ii=0; %未经过检验的新的ii
- amend_count=0; % 记录修正的次数
- temp1=0; %初始化将扩展点至起始点的代价为0
-
- % 这个函数用来随机生成环境,障碍物,起点,终点
- axishandle = createFigure(field,costchart,startposind,goalposind); %将随机生成的方格及障碍物的数据生成图像
-
-
-
-
- %% 利用随机生成的环境数据来进行环境的绘制
-
- function axishandle = createFigure(field,costchart,startposind,goalposind)
-
- % 这个if..else结构的作用是判断如果没有打开的figure图,则按照相关设置创建一个figure图
- if isempty(gcbf) %gcbf是当前返回图像的句柄,isempty(gcbf)假如gcbf为空的话,返回的值是1,假如gcbf为非空的话,返回的值是0
- figure('Position',[560 70 700 700], 'MenuBar','none'); %对创建的figure图像进行设置,设置其距离屏幕左侧的距离为450,距离屏幕下方的距离为50,长度和宽度都为700,并且关闭图像的菜单栏
- axes('position', [0.01 0.01 0.99 0.99]); %设置坐标轴的位置,左下角的坐标设为0.01,0.01 右上角的坐标设为0.99 0.99 (可以认为figure图的左下角坐标为0 0 ,右上角坐标为1 1 )
- else
- gcf; cla; %gcf 返回当前 Figure 对象的句柄值,然后利用cla语句来清除它
- end
-
- n = length(field); %获取矩阵的长度,并赋值给变量n
- field(field < Inf) = 0; %将fieid矩阵中的随机数(也就是没有障碍物的位置处)设为0
- pcolor(1:n+1,1:n+1,[field field(:,end); field(end,:) field(end,end)]);%多加了一个重复的(由n X n变为 n+1 X n+1 )
-
- cmap = flipud(colormap('jet')); %生成的cmap是一个256X3的矩阵,每一行的3个值都为0-1之间数,分别代表颜色组成的rgb值
- cmap(1,:) = zeros(3,1); cmap(end,:) = ones(3,1); %将矩阵cmap的第一行设为0 ,最后一行设为1
- colormap(flipud(cmap)); %进行颜色的倒转
- hold on;
- axishandle = pcolor([1:n+1],[1:n+1],[costchart costchart(:,end); costchart(end,:) costchart(end,end)]); %将矩阵costchart进行拓展,插值着色后赋给axishandle
- [goalposy,goalposx] = ind2sub([n,n],goalposind);
- [startposy,startposx] = ind2sub([n,n],startposind);
- plot(goalposx+0.5,goalposy+0.5,'ys','MarkerSize',10,'LineWidth',6); % 画出起点和终点
- plot(startposx+0.5,startposy+0.5,'go','MarkerSize',10,'LineWidth',6);
- %uicontrol('Style','pushbutton','String','RE-DO', 'FontSize',12, 'Position', [1 1 60 40], 'Callback','astardemo');
- end
-

- %% 这个while循环是本程序的核心,利用FindValue函数中的循环进行迭代来寻找终止点
-
- tic
-
- while ~max(ismember(setOpen,goalposind)) && ~isempty(setOpen)
-
- [temp, ii] = min(setOpenCosts +Weights*setOpenHeuristics); %寻找拓展出来的最小值
-
- if ((setOpen(ii)~=startposind) && (Corner_amend==1))
- [new_ii,amend_count_1]=Path_optimization(temp1,temp,ii,fieldpointers,setOpen,setOpenCosts,startposind,Weights,setOpenHeuristics,Parent_node,Expected_note,untext_ii,amend_count); %进行路径的修正,在保证不增加距离的基础上,使其减少转弯的次数
- ii=new_ii;
- amend_count=amend_count_1;
- end
-
- %这个函数的作用就是把输入的点作为父节点,然后进行拓展找到子节点,并且找到子节点的代价,并且把子节点距离终点的代价costs找到
- [costs,heuristics,posinds] = findFValue(quarter_turn,fieldpointers,eight_directions,Corner_obstacles,setOpen(ii),setOpenCosts(ii),field,goalposind,heuristicmethod);
-
- setClosed = [setClosed; setOpen(ii)]; % 将找出来的拓展出来的点中代价最小的那个点串到矩阵setClosed 中
- setClosedCosts = [setClosedCosts; setOpenCosts(ii)]; % 将拓展出来的点中代价最小的那个点的代价串到矩阵setClosedCosts 中
-
- % 从setOpen中删除刚才放到矩阵setClosed中的那个点
- %如果这个点位于setopen矩阵的内部
- if (ii > 1 && ii < length(setOpen))
- setOpen = [setOpen(1:ii-1); setOpen(ii+1:end)];
- setOpenCosts = [setOpenCosts(1:ii-1); setOpenCosts(ii+1:end)];
- setOpenHeuristics = [setOpenHeuristics(1:ii-1); setOpenHeuristics(ii+1:end)];
-
- %如果这个点位于setopen矩阵第一行
- elseif (ii == 1)
- setOpen = setOpen(2:end);
- setOpenCosts = setOpenCosts(2:end);
- setOpenHeuristics = setOpenHeuristics(2:end);
-
- %如果这个点位于setopen矩阵的最后一行
- else
- setOpen = setOpen(1:end-1);
- setOpenCosts = setOpenCosts(1:end-1);
- setOpenHeuristics = setOpenHeuristics(1:end-1);
- end
-
- % 把拓展出来的点中符合要求的点放到setOpen 矩阵中,作为待选点
- for jj=1:length(posinds) % 在新拓展的4或8个点中,依次寻找代价最小的点,每次循环需要判断的点为posinds(jj)
-
- if ~isinf(costs(jj)) % 判断该点(方格)处没有障碍物
- % 判断一下该点是否 已经存在于setOpen 矩阵或者setClosed 矩阵中
- % 如果我们要处理的拓展点既不在setOpen 矩阵,也不在setClosed 矩阵中
- if ~max([setClosed; setOpen] == posinds(jj))
- fieldpointers(posinds(jj)) = movementdirections(jj);
- costchart(posinds(jj)) = costs(jj);
- setOpen = [setOpen; posinds(jj)];
- setOpenCosts = [setOpenCosts; costs(jj)];
- setOpenHeuristics = [setOpenHeuristics; heuristics(jj)];
-
- % 如果我们要处理的拓展点已经在setOpen 矩阵中
- elseif max(setOpen == posinds(jj))
- I = find(setOpen == posinds(jj));
- % 如果通过目前的方法找到的这个点,比之前的方法好(代价小)就更新这个点
- if setOpenCosts(I) > costs(jj)
- costchart(setOpen(I)) = costs(jj);
- setOpenCosts(I) = costs(jj);
- setOpenHeuristics(I) = heuristics(jj);
- fieldpointers(setOpen(I)) = movementdirections(jj);
- end
-
- % 如果我们要处理的拓展点已经在setClosed 矩阵中
- else
- I = find(setClosed == posinds(jj));
- % 如果通过目前的方法找到的这个点,比之前的方法好(代价小)就更新这个点
- if setClosedCosts(I) > costs(jj)
- costchart(setClosed(I)) = costs(jj);
- setClosedCosts(I) = costs(jj);
- fieldpointers(setClosed(I)) = movementdirections(jj);
- end
- end
- end
- end
-
- if isempty(setOpen) break; end
- set(axishandle,'CData',[costchart costchart(:,end); costchart(end,:) costchart(end,end)]);
- set(gca,'CLim',[0 1.1*max(costchart(find(costchart < Inf)))]);
- drawnow;
- end
-
- toc
-
- %% 拐角修正函数
-
- function [new_ii,amend_count_1] = Path_optimization(temp1,temp, ii,fieldpointers,setOpen,setOpenCosts,startposind,Weights,setOpenHeuristics,Parent_node,Expected_note,untext_ii,amend_count)
- n = length(fieldpointers); %获取矩阵的长度,并赋值给变量n
-
- %获取其父节点的索引值
- switch fieldpointers {setOpen(ii)}
- case 'L' % ’L’ 表示当前的点是由左边的点拓展出来的
- Parent_node = setOpen(ii) - n;
- case 'R' % ’R’ 表示当前的点是由右边的点拓展出来的
- Parent_node = setOpen(ii) + n;
- case 'U' % ’U’ 表示当前的点是由上面的点拓展出来的
- Parent_node = setOpen(ii) -1;
- case 'D' % ’D’ 表示当前的点是由下边的点拓展出来的
- Parent_node = setOpen(ii) + 1;
- case 'LU' % ’LU’ 表示当前的点是由左上边的点拓展出来的
- Parent_node = setOpen(ii) - n - 1;
- case 'RU' % ’RU’ 表示当前的点是由右上边的点拓展出来的
- Parent_node = setOpen(ii) + n - 1;
- case 'LD' % ’LD’ 表示当前的点是由左下面的点拓展出来的
- Parent_node = setOpen(ii) - n + 1;
- case 'RD' % ’RD’ 表示当前的点是由右下边的点拓展出来的
- Parent_node = setOpen(ii) + n + 1;
- end
-
- if Parent_node==startposind %如果这个点的父节点是起始点的话,跳过修正
- new_ii=ii;
- amend_count_1=amend_count;
- else
-
- %获取期望下一步要走的点的索引值
- switch fieldpointers{Parent_node}
-
- case 'L' % ’L’ 表示当前的点是由左边的点拓展出来的,走直线的话,我们期望要走的下一个点为此点右边的点
- Expected_note = Parent_node + n;
- case 'R' % ’R’ 表示当前的点是由右边的点拓展出来的,走直线的话,我们期望要走的下一个点为此点左边的点
- Expected_note = Parent_node - n;
- case 'U' % ’U’ 表示当前的点是由上面的点拓展出来的,走直线的话,我们期望要走的下一个点为此点下面的点
- Expected_note = Parent_node +1;
- case 'D' % ’D’ 表示当前的点是由下边的点拓展出来的,走直线的话,我们期望要走的下一个点为此点上面的点
- Expected_note = Parent_node - 1;
- case 'LU' % ’LU’ 表示当前的点是由左上边的点拓展出来的,走直线的话,我们期望要走的下一个点为此点右下边的点
- Expected_note = Parent_node + n + 1;
- case 'RU' % ’RU’ 表示当前的点是由右上边的点拓展出来的,走直线的话,我们期望要走的下一个点为此点左下边的点
- Expected_note = Parent_node - n + 1;
- case 'LD' % ’LD’ 表示当前的点是由左下面的点拓展出来的,走直线的话,我们期望要走的下一个点为此点右上面的点
- Expected_note = Parent_node + n - 1;
- case 'RD' % ’RD’ 表示当前的点是由右下边的点拓展出来的,走直线的话,我们期望要走的下一个点为此点左上面的点
- Expected_note = Parent_node - n - 1;
- end
-
- if ((Expected_note<=0)||(Expected_note>n*n)) %如果我们期望的点不在待选点矩阵setOpen中,或者超出边界,跳过修正
- new_ii=ii;
- amend_count_1=amend_count;
- else
-
- %计算新的要进行拓展的点在setOPen中的索引值
- if fieldpointers{setOpen(ii)}==fieldpointers{Parent_node} %如果修正之前要走的点就是我们期望的构成直线的点,跳出修正
- new_ii=ii;
- amend_count_1=amend_count;
- elseif find(setOpen == Expected_note) %如果我们期望要走的点在待选点矩阵setOpen中
-
- untext_ii=find(setOpen == Expected_note);
- now_cost=setOpenCosts(untext_ii); %不考虑weight,计算期望点要花费的代价
- temp1 = setOpenCosts(ii); %不考虑weight,计算将要拓展的点要花费的代价
-
- if temp1==now_cost %如果我们期望的点要花费的代价等于修正之前要走的点花费的代价,就进行修正(因为之前要走的点,是待选点矩阵setOPen中代价最小的一个点之一,所以期望的点的代价不可能小于该点)
- new_ii=untext_ii; %将新的setOPen矩阵的索引值赋值给new_ii输出
- amend_count=amend_count+1;
- amend_count_1=amend_count; %amend_count_1中记录了我们进行修正的次数,为了查看这个函数是否有发挥作用
- else
- new_ii=ii; %如果我们期望的点要花费的代价大于修正之前要走的点花费的代价,就跳过修正(A星算法要保证进行拓展的点是待选点中代价最小的,这也是导致远离终止点的哪一类拐角无法得到修正的原因)
- amend_count_1=amend_count;
- end
- else
- new_ii=ii; %如果我们期望的点不在待选点矩阵setOpen中(也就是这个点是障碍物或者超出边界了),则跳过修正
- amend_count_1=amend_count;
- end
- end
- end
- end
- %% findWayBack函数,用来进行路径回溯,这个函数的输入参数是终止点goalposind和矩阵fieldpointers,输出参数是P
- function [p,Road_Long,turn_count] = findWayBack(turn_count,goalposind,fieldpointers,Road_Long)
-
- n = length(fieldpointers); % 获取环境的长度也就是n
- posind = goalposind;
- [py,px] = ind2sub([n,n],posind); % 将索引值posind转换为坐标值 [py,px]
- p = [py px];
-
- %利用while循环进行回溯,当我们回溯到起始点的时候停止,也就是在矩阵fieldpointers中找到S时停止
- while ~strcmp(fieldpointers{posind},'S')
- switch fieldpointers{posind}
-
- case 'L' % ’L’ 表示当前的点是由左边的点拓展出来的
- px = px - 1;
- Road_Long=Road_Long+1;
- case 'R' % ’R’ 表示当前的点是由右边的点拓展出来的
- px = px + 1;
- Road_Long=Road_Long+1;
- case 'U' % ’U’ 表示当前的点是由上面的点拓展出来的
- py = py - 1;
- Road_Long=Road_Long+1;
- case 'D' % ’D’ 表示当前的点是由下边的点拓展出来的
- py = py + 1;
- Road_Long=Road_Long+1;
- case 'LU' % ’LU’ 表示当前的点是由左上边的点拓展出来的
- px = px - 1;py = py - 1;
- Road_Long=Road_Long+sqrt(2);
- case 'RU' % ’RU’ 表示当前的点是由右上边的点拓展出来的
- px = px + 1;py = py - 1;
- Road_Long=Road_Long+sqrt(2);
- case 'LD' % ’LD’ 表示当前的点是由左下面的点拓展出来的
- px = px - 1;py = py + 1;
- Road_Long=Road_Long+sqrt(2);
- case 'RD' % ’RD’ 表示当前的点是由右下边的点拓展出来的
- px = px + 1; py = py + 1;
- Road_Long=Road_Long+sqrt(2);
- end
- posind_1=posind;
- p = [p; py px];
- posind = sub2ind([n n],py,px);% 将坐标值转换为索引值
- if ~strcmp(fieldpointers{posind_1},fieldpointers{posind})
- turn_count=turn_count+1;
- end
- end
- turn_count=turn_count-1;
- end
-
- %% findFValue函数,主要循环中用到的路径拓展函数
-
- %这个函数的作用就是把输入的点作为父节点,然后进行拓展找到子节点,并且找到子节点的代价,并且把子节点距离终点的代价找到。
- %函数的输出量中costs表示拓展的子节点到起始点的代价,heuristics表示拓展出来的点到终止点的距离大约是多少,posinds表示拓展出来的子节点
- function [cost,heuristic,posinds] = findFValue(quarter_turn,fieldpointers,eight_directions,Corner_obstacles,posind,costsofar,field,goalind,heuristicmethod)
- n = length(field); % 获取矩阵的长度
- [currentpos(1) currentpos(2)] = ind2sub([n n],posind); %将要进行拓展的点(也就是父节点posind)的索引值拓展成坐标值
- [goalpos(1) goalpos(2)] = ind2sub([n n],goalind); %将终止点的索引值拓展成坐标值
- cost = Inf*ones(8,1); heuristic = Inf*ones(8,1); pos = ones(8,2); %将矩阵cost和heuristic初始化为8x1的无穷大值的矩阵,pos初始化为8x2的值为1的矩阵
-
- % 拓展方向一:?左
- newx = currentpos(2) - 1; newy = currentpos(1);
- if newx > 0
- pos(1,:) = [newy newx];
- if heuristicmethod
- heuristic(1) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(1) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
- if strcmp(fieldpointers{posind},'U')||strcmp(fieldpointers{posind},'D')
- cost(1) = costsofar + field(newy,newx)+quarter_turn;
- else
- cost(1) = costsofar + field(newy,newx);
- end
- end
-
- % 拓展方向二:右
- newx = currentpos(2) + 1; newy = currentpos(1);
- if newx <= n
- pos(2,:) = [newy newx];
- if heuristicmethod %判断使用欧氏距离模式还是对角距离模式来计算启发式函数
- heuristic(2) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(2) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if strcmp(fieldpointers{posind},'U')||strcmp(fieldpointers{posind},'D')
- cost(2) = costsofar + field(newy,newx)+quarter_turn;
- else
- cost(2) = costsofar + field(newy,newx);
- end
- end
-
- % 拓展方向三:上
- newx = currentpos(2); newy = currentpos(1)-1;
- if newy > 0
- pos(3,:) = [newy newx];
- if heuristicmethod
- heuristic(3) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(3) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if strcmp(fieldpointers{posind},'L')||strcmp(fieldpointers{posind},'R')
- cost(3) = costsofar + field(newy,newx)+quarter_turn;
- else
- cost(3) = costsofar + field(newy,newx);
- end
- end
-
- % 拓展方向四:下
- newx = currentpos(2); newy = currentpos(1)+1;
- if newy <= n
- pos(4,:) = [newy newx];
- if heuristicmethod
- heuristic(4) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(4) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if strcmp(fieldpointers{posind},'L')||strcmp(fieldpointers{posind},'R')
- cost(4) = costsofar + field(newy,newx)+quarter_turn;
- else
- cost(4) = costsofar + field(newy,newx);
- end
- end
-
- % 拓展方向五:左上
- if eight_directions % 判断参数eight_directions是否为1,是否选择斜向拓展
- newx = currentpos(2)-1; newy = currentpos(1)-1;
- else
- newx = 0;
- end
- if (newy > 0) && (newx > 0)
- pos(5,:) = [newy newx];
- if heuristicmethod
- heuristic(5) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(5) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if Corner_obstacles % 是否忽略障碍物四角的障碍性
- cost(5) = costsofar + sqrt(2)* field(newy,newx)+field(newy+1,newx)+field(newy,newx+1)-20;
- if strcmp(fieldpointers{posind},'RU')||strcmp(fieldpointers{posind},'LD') %是否是直角转弯,判断需不需要加上直角转弯代价
- cost(5) = cost(5)+quarter_turn;
- end
- else
- cost(5) = costsofar + sqrt(2)* field(newy,newx);
- if strcmp(fieldpointers{posind},'RU')||strcmp(fieldpointers{posind},'LD')
- cost(5) =cost(5)+quarter_turn;
- end
- end
- end
-
- % 拓展方向六:右上
- if eight_directions
- newx = currentpos(2)+1; newy = currentpos(1)-1;
- else
- newy = 0;
- end
- if (newy > 0) && (newx <= n)
- pos(6,:) = [newy newx];
- if heuristicmethod
- heuristic(6) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(6) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if Corner_obstacles % 是否忽略障碍物四角的障碍性
- cost(6) = costsofar + sqrt(2)* field(newy,newx)+field(newy+1,newx)+field(newy,newx-1)-20;
- if strcmp(fieldpointers{posind},'LU')||strcmp(fieldpointers{posind},'RD') %是否是直角转弯,判断需不需要加上直角转弯代价
- cost(6) = cost(6)+quarter_turn;
- end
- else
- cost(6) = costsofar + sqrt(2)* field(newy,newx);
- if strcmp(fieldpointers{posind},'LU')||strcmp(fieldpointers{posind},'RD')
- cost(6) = cost(6)+quarter_turn;
- end
- end
- end
-
- % 拓展方向七:左下
- if eight_directions
- newx = currentpos(2)-1; newy = currentpos(1)+1;
- else
- newx = 0;
- end
- if (newy <= n) && (newx > 0)
- pos(7,:) = [newy newx];
- if heuristicmethod
- heuristic(7) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(7) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if Corner_obstacles % 是否忽略障碍物四角的障碍性
- cost(7) = costsofar + sqrt(2)* field(newy,newx)+field(newy-1,newx)+field(newy,newx+1)-20;
- if strcmp(fieldpointers{posind},'RU')||strcmp(fieldpointers{posind},'LD') %是否是直角转弯,判断需不需要加上直角转弯代价
- cost(7) =cost(7)+quarter_turn;
- end
- else
- cost(7) = costsofar + sqrt(2)* field(newy,newx);
- if strcmp(fieldpointers{posind},'RU')||strcmp(fieldpointers{posind},'LD')
- cost(7) = cost(7)+quarter_turn;
- end
- end
- end
-
- % 拓展方向八:右下
- if eight_directions
- newx = currentpos(2)+1; newy = currentpos(1)+1;
- else
- newx = n +1 ;
- end
- if (newy <= n) && (newx <= n)
- pos(8,:) = [newy newx];
- if heuristicmethod
- heuristic(8) = 10*sqrt((goalpos(2)-newx)^2 +(goalpos(1)-newy)^2); % 欧几里得距离计算公式
- else
- heuristic(8) =10*(abs(goalpos(2)-newx)+abs(goalpos(1)-newy)+(sqrt(2)-2)*min(abs(goalpos(2)-newx),abs(goalpos(1)-newy))); %対角距离,此时有h(n)=h*(n),在保证最优路径的基础上最大程度上减少无关点的拓展计算
- end
-
- if Corner_obstacles % 是否忽略障碍物四角的障碍性
- cost(8) = costsofar + sqrt(2)* field(newy,newx)+field(newy-1,newx)+field(newy,newx-1)-20;
- if strcmp(fieldpointers{posind},'RU')||strcmp(fieldpointers{posind},'LD') %是否是直角转弯,判断需不需要加上直角转弯代价
- cost(8) =cost(8)+quarter_turn;
- end
- else
- cost(8) = costsofar + sqrt(2)* field(newy,newx);
- if strcmp(fieldpointers{posind},'RU')||strcmp(fieldpointers{posind},'LD')
- cost(8) = cost(8)+quarter_turn;
- end
- end
- end
-
- posinds = sub2ind([n n],pos(:,1),pos(:,2)); % 将拓展出来的子节点的坐标值转换为索引值
- end
-
还有路径长度、拐弯次数、运行时间等参数及函数的使用,不再一一解释了,有不懂的地方需要多看一下代码,有时间有耐心等待的也可以私信我。

