
- 1SQL Sever基本语法(超详细)_sql server语法
- 2Metasploit渗透测试框架_metasploit图形界面
- 3Mysql用户权限分配详解_mysql给用户分配权限
- 4用Python怎么多赚钱?6种办法用上 让你过上挣钱的好日子_学会python怎么挣外快
- 5【Redis】 关于 Redis 哈希类型_redis 的哈希类
- 6OpenVINO 2022 新版本源码编译流程讲解和新特性Auto-Device演示_tinnove openos 源码
- 7使用 MFA 保护对企业应用程序的访问_mfa 应用程序
- 8LLM大模型应用中的安全对齐的简单理解_安全对齐语言模型
- 9IT项目开发团队建设与管理总结(转)_it企业在团队建设方面的常见做法
- 10对文件上传漏洞(靶场upload-labs-master搭建)的学习
【正点原子K210连载】第十九章 machine.PWM类实验 摘自【正点原子】DNK210使用指南-CanMV版指南
赞
踩
1)实验平台:正点原子ATK-DNK210开发板
2)平台购买地址https://detail.tmall.com/item.htm?id=731866264428
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban
第十九章 machine.PWM类实验
本章将介绍machine模块中的PWM类。通过本章的学习,读者将学习到machine模块中PWM类的使用。
本章分为如下几个小节:
19.1 machine.PWM类介绍
19.2 硬件设计
19.3 程序设计
19.4 运行验证
19.1 machine.PWM类介绍
machine.PWM类是machine模块内提供的类,该类主要用于产生PWM(Pulse-width modulation,脉冲宽度调制),且能够任意通过Kendryte K210上的47个自由IO进行输出。每个PWM都依赖于一个Timer对象,且当Timer对象于PWM对象绑定后,Timer对象便不能再做为普通的定时器使用。因为Kendryte K210拥有3个硬件定时器,且每个硬件定时器有4个通道,因此使用machine.PWM类最大可以同时产生12路PWM。
machine.PWM提供了PWM构造函数,用于创建一个PWM对象,PWM构造函数如下所示:
class PWM(tim, freq=None, duty=None, pin=-1, enable=True)
通过PWM构造函数可以通过指定参数创建并初始化一个PWM对象。
tim指的是Timer对象,Timer对象可以通过machine.Timer类中的Timer构造函数进行构造。
freq指的是PWM的频率。
duty指的是PWM占空比,即一个PWM周期中高电平所占时间的百分比。
pin指的是PWM的输出引脚,也可以不设置,而是使用FPIOA管理器进行分配。
enable指的是是否在PWM对象构造成功后便开始产生并输出PWM,当为True时,PWM对象会在被构造成功后便开始产生并输出PWM,当为False时,PWM对象在被构造成功后并不会开始产生并输出PWM。
PWM构造函数的使用示例如下所示:
from board import board_info
from machine import Timer
from machine import PWM
timer = Timer(Timer.TIMER0, Timer.CHANNEL0, MODE_PWM)
pwm = PWM(timer, freq=500000, duty=50, pin=board_info.LEDR, enable=True)
- 1
- 2
- 3
- 4
- 5
- 6
machine.PWM类为PWM对象提供了enable()方法,用于开启PWM对象产生并输出PWM,enable()方法如下所示:
PWM.enable()
enable()方法用于开启PWM对象产生并输出PWM,方法执行后,Kendryte K210上指定的IO引脚,并会输出特定频率和占空比的PWM。
enable()方法的使用示例如下所示:
from board import board_info
from machine import Timer
from machine import PWM
timer = Timer(Timer.TIMER0, Timer.CHANNEL0, MODE_PWM)
pwm = PWM(timer, freq=500000, duty=50, pin=board_info.LEDR, enable=False)
pwm.enable()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
machine.PWM类为PWM对象提供了disable()方法,用于轻质PWM对象产生并输出PWM,disable()方法如下所示:
PWM.disable()
disable()方法用于停止PWM对象产生并输出PWM,方法执行后,Kendryte K210的特定IO引脚便会停止输出PWM。
disable()方法的使用示例如下所示:
from board import board_info
from machine import Timer
from machine import PWM
timer = Timer(Timer.TIMER0, Timer.CHANNEL0, MODE_PWM)
pwm = PWM(timer, freq=500000, duty=50, pin=board_info.LEDR, enable=True)
pwm.disable()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
machine.PWM类为PWM对象提供了freq()方法,用于配置或获取PWM对象产生的PWM的频率,freq()方法如下所示:
PWM.freq(freq)
freq()方法用于配置或获取PWM对象产生的PWM频率。
freq指的是要配置的PWM频率,PWM频率的配置是即时生效的,或该参数为空,则freq()方法将返回当前PWM对象产生PWM的频率。
freq()方法的使用示例如下所示:
from board import board_info
from machine import Timer
from machine import PWM
timer = Timer(Timer.TIMER0, Timer.CHANNEL0, MODE_PWM)
pwm = PWM(timer, freq=500000, duty=50, pin=board_info.LEDR, enable=True)
pwm.freq(100000)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
machine.PWM类为PWM对象提供了duty()方法,用于配置或获取PWM对象产生的PWM的占空比,duty()方法如下所示:
PWM.duty(duty)
duty()方法用于配置或获取PWM对象产生的PWM占空比,这里的占空比指的是PWM高电平时间占整个PWM周期的百分比。
duty指的是要配置的PWM占空比,PWM占空比的配置是即时生效的,或该参数为空,则duty()方法将返回当前PWM对象产生PWM的占空比。
duty()方法的使用示例如下所示:
from board import board_info
from machine import Timer
from machine import PWM
timer = Timer(Timer.TIMER0, Timer.CHANNEL0, MODE_PWM)
pwm = PWM(timer, freq=500000, duty=50, pin=board_info.LEDR, enable=True)
pwm.duty(66)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
19.2 硬件设计
19.2.1 例程功能
- 创建一个PWM对象,并创建一个PWM模式的Timer对象与之绑定
- 按下KEY0按键后增加PWM对象输出PWM的占空比
- 按下KEY1按键后减少PWM对象输出PWM的占空比
19.2.2 硬件资源 - 双色LED
LEDR - IO24 - 独立按键
KEY0按键 - IO18
KEY1按键 - IO19
19.2.3 原理图
本章实验内容,主要讲解machine.PWM类的使用,无需关注原理图。
19.3 程序设计
19.3.1 machine.PWM类
有关machine.PWM类的介绍,请见第19.1小节《machine.PWM类介绍》。
19.3.2 程序流程图
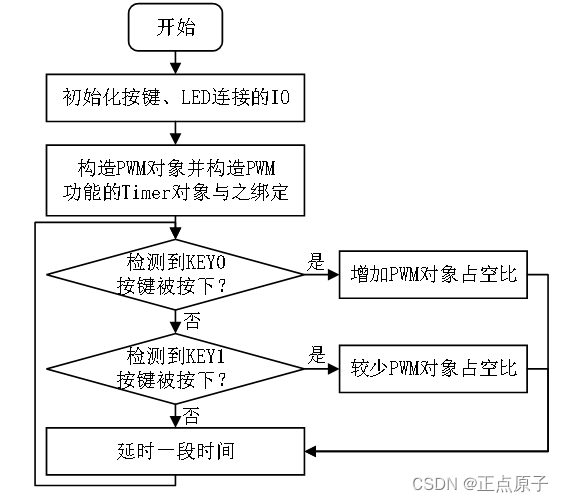
图19.3.2.1 machine.PWM类实验流程图
19.3.3 main.py代码
main.py中的脚本代码如下所示:
from board import board_info from fpioa_manager import fm from maix import GPIO import time from machine import Timer from machine import PWM fm.register(board_info.KEY0, fm.fpioa.GPIOHS0) fm.register(board_info.KEY1, fm.fpioa.GPIOHS1) key0 = GPIO(GPIO.GPIOHS0, GPIO.IN, GPIO.PULL_UP) key1 = GPIO(GPIO.GPIOHS1, GPIO.IN, GPIO.PULL_UP) timer0 = Timer(Timer.TIMER0, Timer.CHANNEL0, mode=Timer.MODE_PWM) # 构造PWM对象 pwm0 = PWM(timer0, freq=500000, duty=50, pin=board_info.LEDR, enable=True) duty = 50 while True: if key0.value() == 0: time.sleep_ms(20) if key0.value() == 0: duty = duty + 10 while key0.value() == 0: pass elif key1.value() == 0: time.sleep_ms(20) if key1.value() == 0: duty = duty - 10 while key1.value() == 0: pass if duty == 0: duty = 10 elif duty == 110: duty = 100 # 修改PWM占空比 if pwm0.duty() != duty: pwm0.duty(duty) time.sleep_ms(10)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
可以看到,首先是初始化使用到独立按键的IO,然后构造了一个PWM模式的Timer对象。
接下来构造了一个PWM对象,PWM对象的配置为从红色LED连接的IO引脚输出一个频率为500KHz,占空比为50%的PWM。
最后就是在一个循环中读取按键的状态,当读取到KEY0按键被按下,则增加PWM输出的占空比,具体应表现为红色LED的亮度减少,当读取到KEY1按键被按下,则减少PWM输出的占空比,具体应表现为红色LED的亮度增加。
19.4 运行验证
将DNK210开发板连接CanMV IDE,并点击CanMV IDE上的“开始(运行脚本)”按钮后,此时,便可看到红色LED处于半亮状态,若按下KEY0按键,则可以看到红色LED的亮度减小,这是因为PWM输出的占空比增加导致的,若按下KEY1按键,则可以看到红色LED的亮度增加,这是因为PWM输出的占空比减小导致的。

