
- 1Base64编码方式的介绍及其编码解码_base64解码
- 2【Linux】Linux项目自动化构建工具-make/Makefile(学习复习兼顾)_liunx 自动化工具
- 3python 人像生成_GAN漫画人物生成实战
- 4 2020年阿里社招的笔试题目2--社招居然也让我笔试醉了_阿里社招笔试
- 5mac笔记本时间不对_mac电脑日期时间错误
- 6hive查看数据库里库的信息_如何获取Hive数据库中的所有表定义?
- 7python rows_Python 操作 MySQL 的5种方式
- 810大主流压力测试工具推荐,总有一款适合你_压力测试软件
- 9小程序AI智能名片S2B2C商城系统:颠覆传统,引领门店私域流量狂潮,打造线上赚钱新神话!_ai名片 商城
- 10URL过滤技术
机器学习(文献阅读)
赞
踩
摘要
本文主要讨论SA ConvLSTM的模型。本文简要介绍了LSTM的结构以及运行逻辑,并展示了ConvLSTM。其次本文展示了题为Self-Attention ConvLSTM for Spatiotemporal Prediction的论文主要内容。这篇论文提出了Self-attention ConvLSTM模型,该模型将自注意力机制引入到 ConvLSTM 中。具体来说,提出了一种新颖的自注意力记忆(SAM)来记忆在空间和时间域方面具有远程依赖性的特征。该文在多个数据集上进行实验,从数据角度证明了该网络的优越性。最后,本文基于pytorch实现了GRU和LSTM模型并用于预测时序数据集的后续结果。
Abstract
This article focuses on SA ConvLSTM. This article briefly describes the structure and operation logic of LSTM, and shows the ConvLSTM. Secondly, this paper presents the main content of the paper entitled Self-Attention ConvLSTM for Spatiotemporal Prediction. This paper proposes self-attention ConvLSTM model, which introduces the self-attention mechanism into ConvLSTM. Specifically, a novel self-attention memory (SAM) is proposed to memorize features that are remotely dependent in terms of spatial and temporal domains. This paper carries out experiments on several datasets, and the proves superiority of the network from the perspective of data. Finally, this article implements the GRU and LSTM model based on pytorch and uses them to predict the subsequent results of time series datasets.
二、文献阅读
1. 题目
题目:Self-Attention ConvLSTM for Spatiotemporal Prediction
作者:Zhihui Lin, Maomao Li, Zhuobin Zheng, Yangyang Cheng, Chun Yuan
链接:https://doi.org/10.1609/aaai.v34i07.6819
发布:Vol. 34 No. 07: AAAI-20 Technical Tracks 7 /AAAI Technical Track: Vision
2. abstract
为了提取具有全局和局部依赖性的空间特征,将自注意力机制引入到 ConvLSTM 中。具体来说,提出了一种新颖的自注意力记忆(SAM)来记忆在空间和时间域方面具有远程依赖性的特征。基于自注意力,SAM 可以通过聚合输入本身所有位置的特征和具有成对相似度分数的记忆特征来生成特征。此外,将 SAM 嵌入到标准 ConvLSTM 中,构建用于时空预测的自注意力 ConvLSTM(SA-ConvLSTM)。在实验中,应用SA-ConvLSTM对MovingMNIST和KTH数据集进行帧预测,对TexiBJ数据集进行交通流预测。
To extract spatial features with both global and local dependencies, authors introduce the self-attention mechanism into ConvLSTM. Specifically, a novel self-attention memory (SAM) is proposed to memorize features with long-range dependencies in terms of spatial and temporal domains. Based on the self-attention, SAM can produce features by aggregating features across all positions of both the input itself and memory features with pair-wise similarity scores. Furthermore, authors embed the SAM into a standard ConvLSTM to construct a self-attention ConvLSTM (SA-ConvLSTM) for the spatiotemporal prediction. In experiments, authors apply the SA-ConvLSTM to perform frame prediction on the MovingMNIST and KTH datasets and traffic flow prediction on the TexiBJ dataset.
3. 网络架构
为了评估 self-attention 在时空预测中的有效性,通过级联 self-attention 模块和标准 ConvLSTM 构建了一个基本的 self-attention ConvLSTM 模型。随后,基于所提出的自注意力记忆模块构建了更先进和复杂的模型 SAConvLSTM。
3.1基础模型
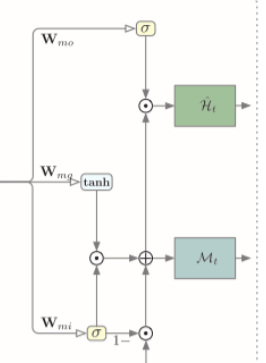
Self-Attetion:下图显示了标准自注意力模型的流程。原始图
H
t
\mathcal H_t
Ht被映射至不同的特征空间作为查询query:
Q
h
=
W
q
H
t
∈
R
C
^
×
N
\mathbf Q_h=\mathbf W_q\mathcal H_t\in \mathbb R^{\hat C\times N}
Qh=WqHt∈RC^×N,键key:
K
h
=
W
k
H
t
∈
R
C
^
×
N
\mathbf K_h=\mathbf W_k\mathcal H_t\in \mathbb R^{\hat C\times N}
Kh=WkHt∈RC^×N,以及值key:
V
h
=
W
v
H
t
∈
R
C
×
N
\mathbf V_h=\mathbf W_v\mathcal H_t\in R^{C\times N}
Vh=WvHt∈RC×N,其中
{
W
q
,
W
k
,
W
v
}
\{\mathbf W_q, \mathbf W_k, \mathbf W_v\}
{Wq,Wk,Wv}是一个
1
×
1
1\times 1
1×1卷积层的权重集,
C
,
C
^
C, \hat C
C,C^是通道数,其中
N
=
H
×
W
N=H\times W
N=H×W。每对点的相似度通过应用矩阵产生式来计算:
e
=
Q
h
T
K
h
∈
R
N
×
N
(2)
\mathbf e=\mathbf Q_h^T\mathbf K_h\in \mathbb R^{N\times N} \tag{2}
e=QhTKh∈RN×N(2)
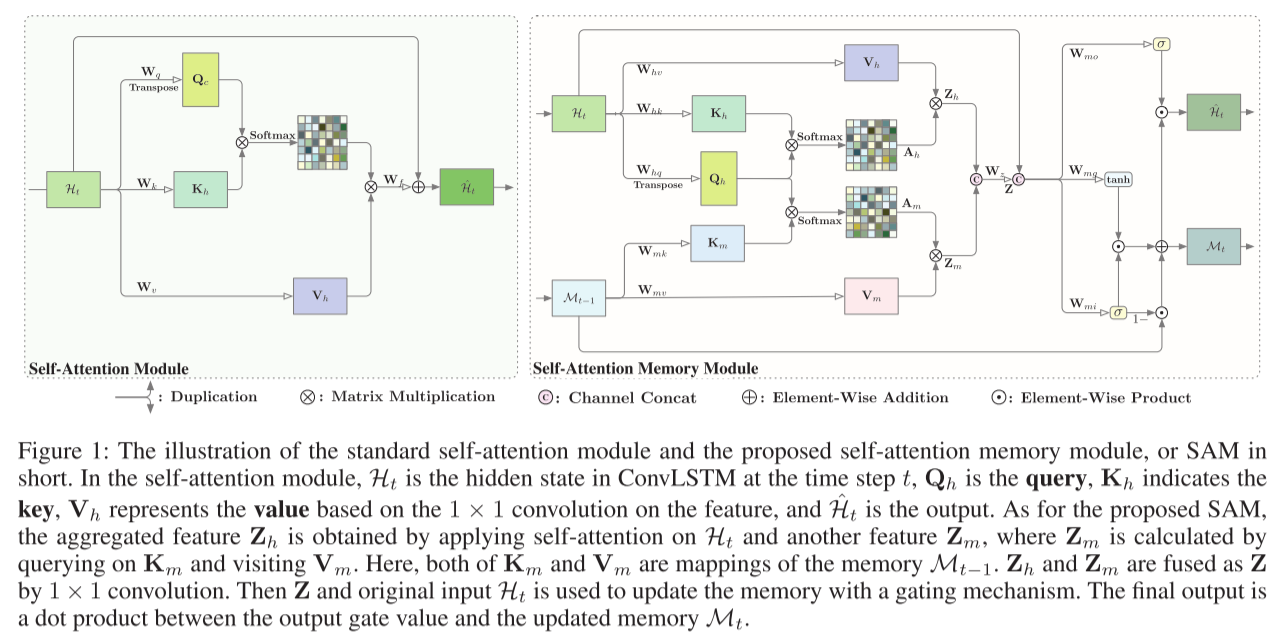
上图为标准自注意力模块和建议的自注意力内存模块(简称 SAM)的图示。在自注意力模块中, H t \mathcal H_t Ht是时间步t处ConvLSTM中的隐藏状态, Q h \mathbf Q_h Qh是查询, K h \mathbf K_h Kh表示键, V h \mathbf V_h Vh表示基于特征上的1×1卷积的值, H ^ t \hat {\mathcal H}_t H^t是输出。对于所提出的SAM,聚合特征 Z h \mathbf Z_h Zh是通过对Ht和另一个特征 Z m \mathbf Z_m Zm应用自注意力来获得的,其中 Z m \mathbf Z_m Zm是通过查询 K m \mathbf K_m Km并访问 V m \mathbf V_m Vm来计算的。这里, K m \mathbf K_m Km和 V m \mathbf V_m Vm都是存储器 M t − 1 \mathcal M_{t-1} Mt−1的映射。 Z h \mathbf Z_h Zh和 Z m \mathbf Z_m Zm通过1×1卷积融合为Z。然后使用 Z 和原始输入 H t \mathcal H_t Ht 通过门控机制更新内存。最终输出是输出门值和更新后的内存 M t \mathcal M_t Mt之间的点积。
第 i 个点和第 j 个点之间的相似度可以索引为
e
i
,
j
=
(
H
t
,
i
T
W
q
T
)
(
W
k
H
t
,
j
)
e_{i,j} =(\mathcal H^T_{t,i}\mathbf W^T_q )(\mathbf W_k\mathcal H_{t,j})
ei,j=(Ht,iTWqT)(WkHt,j) 其中
H
t
,
i
H_{t,i}
Ht,i 和
H
t
,
j
H_{t,j}
Ht,j 是具有以下形状的特征向量C × 1。然后,相似度分数沿列标准化:
α
i
,
j
=
exp
e
i
,
j
∑
k
=
1
N
exp
e
i
,
k
,
i
,
j
∈
{
1
,
2
,
…
,
N
}
(3)
\alpha_{i,j}=\frac{\exp e_{i,j}}{\sum_{k=1}^N\exp e_{i,k}},i,j\in \{1,2,\dots,N\} \tag{3}
αi,j=∑k=1Nexpei,kexpei,j,i,j∈{1,2,…,N}(3)
第 i 个位置的聚合特征是通过所有位置的加权和来计算的:
Z
i
=
∑
j
=
1
N
α
i
,
j
(
W
v
H
t
;
j
)
(4)
\mathbf Z_i=\sum_{j=1}^N\alpha_{i,j}(\mathbf W_v\mathcal H_{t;j}) \tag{4}
Zi=j=1∑Nαi,j(WvHt;j)(4)
其中
W
v
H
t
,
j
∈
R
C
×
1
\mathbf W_v\mathcal H_{t,j} \in \mathbb R^{C×1}
WvHt,j∈RC×1 是值
V
h
\mathbf V_h
Vh 的第 j 列。输出是通过快捷连接
H
t
=
W
f
Z
+
H
t
\mathcal H_t = \mathbf W_f\mathbf Z+\mathcal H_t
Ht=WfZ+Ht 获得的。这里,残差机制稳定了模型训练,并确保模块可以灵活地嵌入到其他深度模型中。
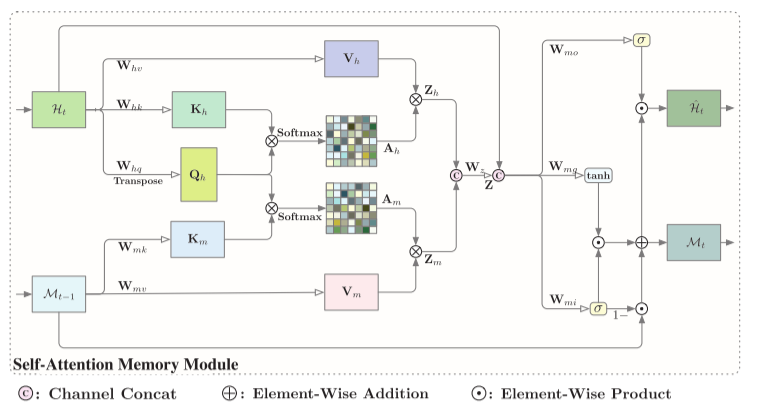
3.2自注意力记忆模块
认为当前时间步长的预测可以受益于过去的相关特征。因此通过构建具有自注意力机制的新设计的记忆单元M,提出了自注意力记忆模块。使用所提出的记忆单元来表示具有全局空间和时间感受野的一般时空信息。
下图为自注意力记忆模块,其接受两个输入,当前时间步的输入特征 H t \mathcal H_t Ht 和最后一步的记忆 M t − 1 \mathcal M_{t−1} Mt−1。整个流程可以分为三个部分:特征聚合以获得全局上下文信息、内存更新和输出。
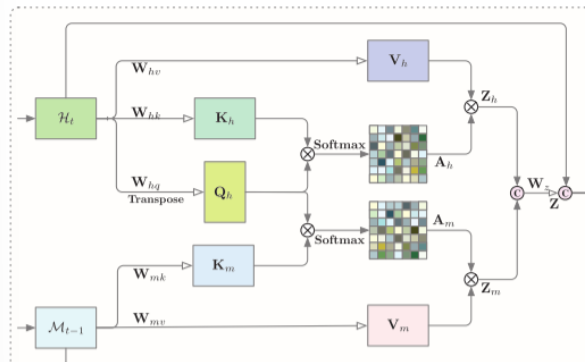
特征聚合。在每个时间步,聚合特征
Z
\mathbf Z
Z 是
Z
h
\mathbf Z_h
Zh 和
Z
m
\mathbf Z_m
Zm 的融合。
Z
m
\mathbf Z_m
Zm 通过在最后一个时间步
M
t
−
1
\mathcal M_{t−1}
Mt−1 查询内存来聚合。内存通过权重
W
m
k
\mathbf W_{mk}
Wmk 和
W
m
v
\mathbf W_{mv}
Wmv 通过 1 × 1 卷积映射为键
K
m
∈
R
C
^
×
N
\mathbf K_m \in \mathbb R ^{\hat C×N}
Km∈RC^×N 和值
V
m
∈
R
C
×
N
\mathbf V_m \in \mathbb R^{C×N}
Vm∈RC×N。然后,通过查询
Q
h
\mathbf Q_h
Qh 和密钥
K
m
\mathbf K_m
Km 之间的矩阵乘法计算输入和内存之间的相似度分数:
e
m
=
Q
h
T
K
m
∈
R
N
×
N
(5)
\mathbf e_m=\mathbf Q_h^T\mathbf K_m\in \mathbb R^{N\times N} \tag{5}
em=QhTKm∈RN×N(5)
用于聚合特征的所有权重都是通过沿每行应用 SoftMax 函数获得的,故有和(3)类似的以下等式:
α
m
;
i
,
j
=
exp
e
m
;
i
,
j
∑
k
=
1
N
exp
e
m
;
i
,
k
,
i
,
j
∈
{
1
,
2
,
…
,
N
}
(6)
\alpha_{m;i,j}=\frac{\exp e_{m;i,j}}{\sum_{k=1}^N\exp e_{m;i,k}},i,j\in\{1,2,\dots,N\} \tag{6}
αm;i,j=∑k=1Nexpem;i,kexpem;i,j,i,j∈{1,2,…,N}(6)
然后,特征
Z
m
\mathbf Z_m
Zm 中第 i 个位置的“像素”通过值
V
m
\mathbf V_m
Vm 中所有 N 个位置的加权和来计算
Z
m
;
i
=
∑
j
=
1
N
α
m
;
i
,
j
V
m
;
j
=
∑
j
=
1
N
α
m
;
i
,
j
W
m
v
M
t
−
1
;
j
(7)
\mathbf Z_{m;i}=\sum_{j=1}^N\alpha_{m;i,j}\mathbf V_{m;j}=\sum_{j=1}^N\alpha_{m;i,j}\mathbf W_{mv}\mathcal M_{t-1;j} \tag{7}
Zm;i=j=1∑Nαm;i,jVm;j=j=1∑Nαm;i,jWmvMt−1;j(7)
其中
M
t
−
1
\mathcal M_{t-1}
Mt−1是第j列的记忆。
最后,聚合特征 Z \mathbf Z Z可由 Z = W z [ Z h ; Z m ] \mathbf Z=\mathbf W_z[\mathbf Z_h;\mathbf Z_m] Z=Wz[Zh;Zm]获得
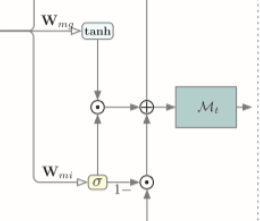
内存更新。采用门控机制自适应的更新内存M,使得SAM可以捕获时空域的长程依赖性。聚合特征Z和原始输入
H
t
\mathcal H_t
Ht用于生成输入们
i
t
i_t
it以及融合特征
g
t
g_t
gt。更新进度可以表述为:
i
t
′
=
σ
(
W
m
;
z
i
∗
Z
+
W
m
;
h
i
∗
H
t
+
b
m
;
i
)
g
t
′
=
tanh
(
W
m
;
z
g
∗
Z
+
W
m
;
h
g
∗
H
t
+
b
m
;
g
)
M
t
=
(
1
−
i
t
′
)
∘
M
t
−
1
+
i
t
′
∘
g
t
′
(8)
i_t'=\sigma(W_{m;zi}*\mathbf Z+W_{m;hi}*\mathcal H_t+b_{m;i})\\ g_t'=\text{tanh}(W_{m;zg}*\mathbf Z+W_{m;hg}*\mathcal H_t+b_{m;g})\\ \mathcal M_t=(1-i_t')\circ \mathcal M_{t-1}+i_t'\circ g_t' \tag{8}
it′=σ(Wm;zi∗Z+Wm;hi∗Ht+bm;i)gt′=tanh(Wm;zg∗Z+Wm;hg∗Ht+bm;g)Mt=(1−it′)∘Mt−1+it′∘gt′(8)
输出。自注意力记忆模块的输出特征
H
^
t
\mathcal {\hat H}_t
H^t 是输出门 o t 与更新记忆 Mt 之间的点积,可以表示为:
o
t
′
=
σ
(
W
m
;
z
o
∗
Z
+
W
m
;
h
o
∗
H
t
+
b
m
;
o
)
H
^
t
=
o
t
′
∘
M
t
(9)
o_t'=\sigma(W_{m;zo}*\mathbf Z+W_{m;ho}*\mathcal H_t+b_{m;o}) \mathcal {\hat H}_t=o_t'\circ \mathcal M_t \tag{9}
ot′=σ(Wm;zo∗Z+Wm;ho∗Ht+bm;o)H^t=ot′∘Mt(9)
3.3Self-Attention ConvLSTM
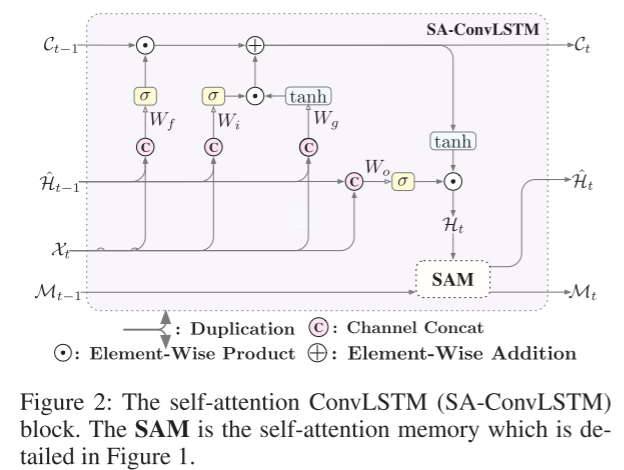
SAM是3.2中描述的框架,作者将该部分嵌入到ConvLSTM中。相应的,SAM可以灵活的嵌入到其他模型。
4. 文献解读
4.1 Introduction
由于复杂的动力学和外观变化,时空预测具有挑战性。其中,一个关键问题是如何让ConvLSTM捕获有效的长程依赖关系。作者认为当前时间步长的特征可以从过去聚合相关特征中受益。因此,该文提出了 ConvLSTM 的自注意力记忆模块,简称 SAM。 SAM利用自注意力的特征聚合机制,通过计算成对相似度得分来融合当前特征和记忆特征。将 SAM 嵌入到 ConvLSTM 中,构建自注意力 ConvLSTM,简称 SA-ConvLSTM。消融实验证明了自我关注和额外记忆对不同类型数据的有效性。此外,SA-ConvLSTM 在所有数据集上以比以前最先进的方法更少的参数和更高的效率实现了最佳结果。
4.2 创新点
- 提出了 ConvLSTM 的一种新变体,名为 SAConvLSTM 来执行时空预测,它可以成功捕获远程空间依赖性。
- 设计了一个基于记忆的自注意力模块(SAM)来记住预测过程中的全局时空依赖性。
- 在 MovingMNIST 和 KTH 上评估 SA-ConvLSTM 进行多帧预测,在 TexiBJ 上评估交通流预测。与当前最先进的模型 MIM 相比,它以更少的参数和更高的效率在所有数据集中取得了最佳结果。
4.3 实验过程
使用三个常用数据集进行时空预测,包含 MovingMNIST 和 KTH上进行多帧预测,以及TexiBJ上的交通流预测。首先对 MovingMNIST 和 TexiBJ 进行消融研究。随后,展示了每个数据集的定量结果。
4.3.1实现
应用了具有 64 个隐藏状态的 4 层架构每个模型的每一层。训练过程中采用了预定采样策略和层标准化。每个模型都使用 ADAM 优化器进行训练,初始学习率为 0.001。训练时,小批量设置为8,训练过程在80,000次迭代后停止。对 MovingMNIST 和 TaxiBJ 数据集使用 L2 损失,对 KTH 数据集使用 L1+ L2 损失。
4.3.2数据集
MovingMNIST:描绘了两个可能重叠的数字以恒定速度移动并从图像边缘反弹。图像大小为64×64×1,每个序列包含20帧,其中10个输入和10个用于预测。
TaxiBJ:从混乱的现实环境中收集的,包含从北京出租车的GPS监视器连续收集的交通流图像。每一帧都是 32 × 32 × 2 的图像网格。两个通道代表此时进出同一小区的车流量。我们使用 4 个已知帧来预测接下来的 4 帧
KTH:包含 6 类人类动作,包括拳击、挥手、拍手、行走、慢跑和跑步,由 25 个人在 4 个不同场景中完成。图像大小从 320×240 调整为 128×128。10 帧用于在训练期间预测接下来的 10 帧,在推理时预测接下来的 20 帧。
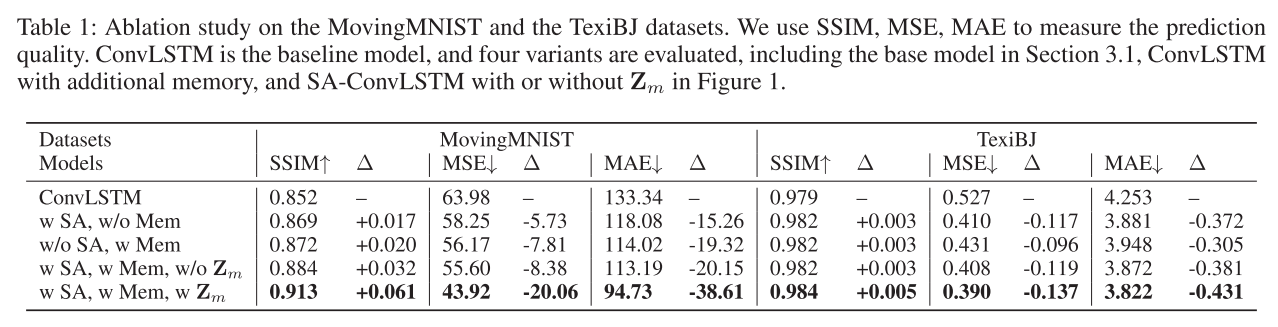
4.3.3消融实验
MovingMNIST 和 TexiBJ 进行了消融研究,以评估不同类型数据的模型。
应用了五种不同的模型:
- 标准的4层ConvLSTM
- 如图2所示构建的带有自注意力的基本模型
- 带有额外记忆单元M但没有自注意力部分的ConvLSTM
- 图1中没有 Z m \mathbf Z_m Zm的SA-ConvLSTM
- 完整的SA-ConvLSTM
采用SSIM(结构相似性指数度量)、MSE(均方误差)和MAE(平均绝对误差)作为度量,其中MSE和MAE测量像素级差异。
实验结果如下表所示。整个SA-ConvLSTM结合了两者的优点,在这两类数据上分别降低了32.2%和26.0%的MSE。从具有全局空间和时间依赖性的附加记忆中聚合过去的特征对于 SA-ConvLSTM 来说非常重要。
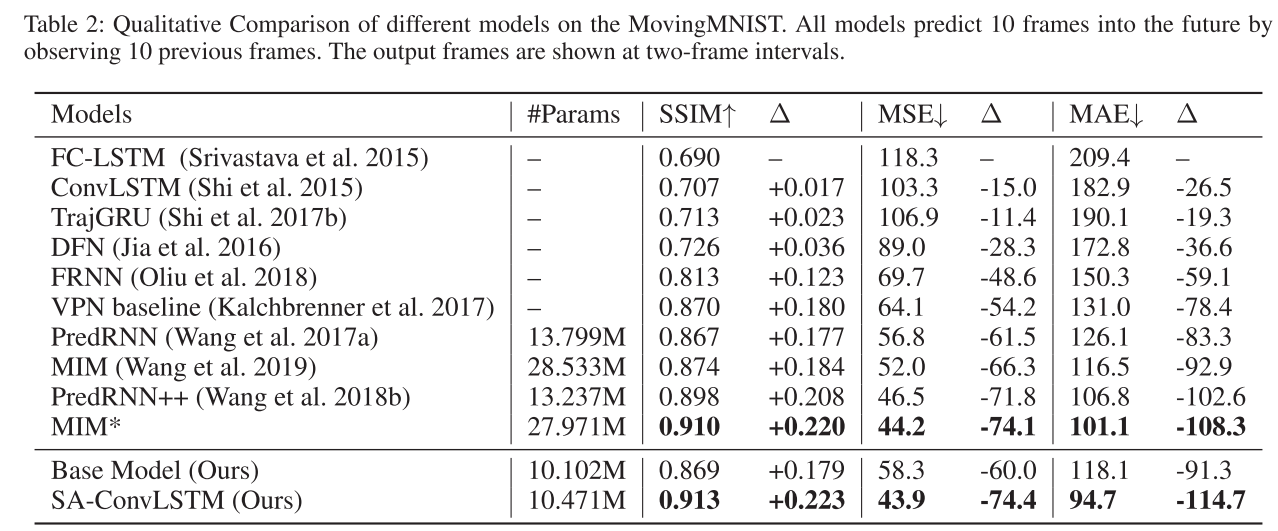
4.3.4定量以及定性实验
MovingMNIST:PredRNN、PredRNN++、MIM等模型作为比较。所有模型都根据之前 10 帧预测接下来的 10 帧。该模型做出了其中较好的成果,且模型规模相较于其他模型具有一定优势。定性结果如下表
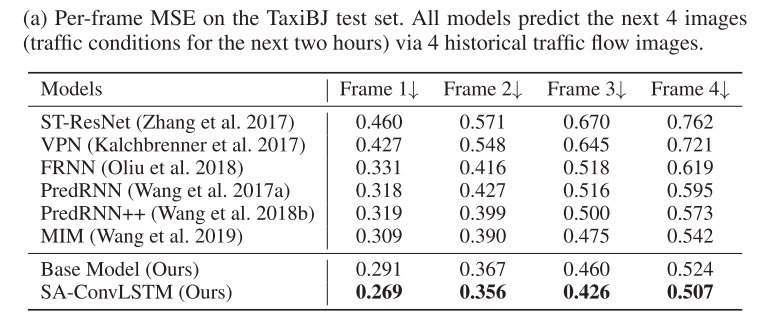
TaxiBJ:下表为该数据集测试集的定量比较。每个模型通过 4 个已知帧预测接下来的 4 帧。采用逐帧 MSE 作为度量。所提出的 SA-ConvLSTM 比 MIM 降低了平均 MSE 误差约 9.3%。
KTH。下表显示了 KTH 数据集的定量比较结果。使用最后 10 帧来预测接下来的 20 帧。 SA-ConvLSTM在KTH数据集上展示了其高效率和灵活性。它相较于最先进模型的 PSNR 提高了 0.86,SSIM 提高了 0.026。基础模型仍然取得了与 PredRNN 相当的结果。SA Conv-LSTM不仅可以保留更多的纹理信息,而且可以提高预测精度。

4.3.5注意力可视化
为了解释所提出的 SA-ConvLSTM 中自注意力机制的效果,我们从 MovingMNIST 的测试集中随机选择一些示例,并将注意力图可视化,如下图所示,其中注意力图为
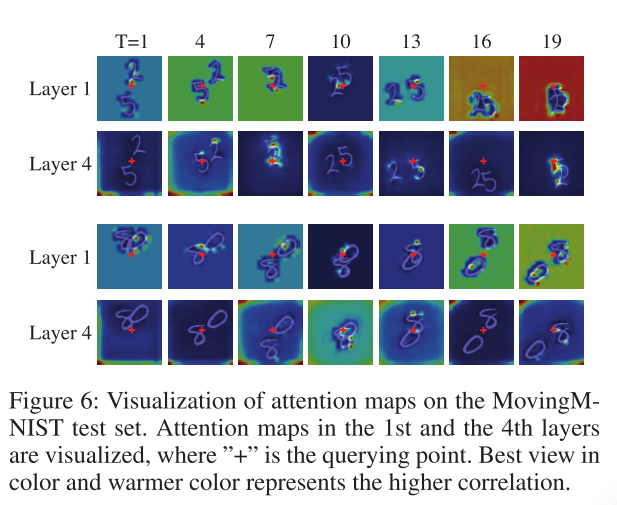
颜色越暖的区域与查询点的相关性越强。当查询点位于背景上时,大部分权重集中在背景上。低层(第1层)特征是平移不变的,使得背景特征基本相同,第1层可以统一关注背景像素。相比之下,第 4 层的特征具有更多语义信息。这里,Moving-MNIST 中数字出现在角落的概率非常低。这种统计先验可以由网络学习。SAM 学习将角点处的特征转换为背景滤波器,这可用于构建更准确的前景或背景特征。
4.4 结论
在本文中,提出了用于时空预测的 SA-ConvLSTM。由于当前时间步的预测可以受益于过去的相关特征,因此我们构建了一个自注意力记忆模块来捕获空间和时间维度上的远程依赖性。与之前最先进的模型相比,所提出的 SA-ConvLSTM 在所有数据集上以更少的参数和更高的效率实现了最佳结果。
三、使用GRU和LSTM进行时间预测
使用的数据集是每小时能源消耗数据集,可以在Kaggle上找到。该数据集包含按小时记录的美国不同地区的电力消耗数据,链接地址
目标是创建一个模型,可以根据历史使用数据准确预测下一小时的能源使用情况。使用 GRU 和 LSTM 模型来训练一组历史数据,并在未见过的测试集上评估这两个模型。从特征选择和数据预处理开始,然后定义、训练并最终评估模型。
1.模型定义
定义GRU以及LSTM模型
class GRUNet(nn.Module): def __init__(self, input_dim, hidden_dim, output_dim, n_layers, drop_prob=0.2): super(GRUNet, self).__init__() self.hidden_dim = hidden_dim self.n_layers = n_layers self.gru = nn.GRU(input_dim, hidden_dim, n_layers, batch_first=True, dropout=drop_prob) self.fc = nn.Linear(hidden_dim, output_dim) self.relu = nn.ReLU() def forward(self, x, h): out, h = self.gru(x, h) out = self.fc(self.relu(out[:,-1])) return out, h def init_hidden(self, batch_size): weight = next(self.parameters()).data hidden = weight.new(self.n_layers, batch_size, self.hidden_dim).zero_().to(device) return hidden class LSTMNet(nn.Module): def __init__(self, input_dim, hidden_dim, output_dim, n_layers, drop_prob=0.2): super(LSTMNet, self).__init__() self.hidden_dim = hidden_dim self.n_layers = n_layers self.lstm = nn.LSTM(input_dim, hidden_dim, n_layers, batch_first=True, dropout=drop_prob) self.fc = nn.Linear(hidden_dim, output_dim) self.relu = nn.ReLU() def forward(self, x, h): out, h = self.lstm(x, h) out = self.fc(self.relu(out[:,-1])) return out, h def init_hidden(self, batch_size): weight = next(self.parameters()).data hidden = (weight.new(self.n_layers, batch_size, self.hidden_dim).zero_().to(device), weight.new(self.n_layers, batch_size, self.hidden_dim).zero_().to(device)) return hidden

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
两个模型在隐藏状态和层中将具有相同数量的维度,在相同数量的epoch和学习率上进行训练,并在完全相同的数据集上进行训练和测试。
将使用对称平均绝对百分比误差(SMAPE)来评估模型
KaTeX parse error: Unexpected end of input in a macro argument, expected '}' at end of input: …y_i|+|y_i|)/2}
2.训练过程
def train(train_loader, learn_rate, hidden_dim=256, EPOCHS=5, model_type="GRU"): # Setting common hyperparameters input_dim = next(iter(train_loader))[0].shape[2] output_dim = 1 n_layers = 2 # Instantiating the models if model_type == "GRU": model = GRUNet(input_dim, hidden_dim, output_dim, n_layers) else: model = LSTMNet(input_dim, hidden_dim, output_dim, n_layers) model.to(device) # Defining loss function and optimizer criterion = nn.MSELoss() optimizer = torch.optim.Adam(model.parameters(), lr=learn_rate) model.train() print("Starting Training of {} model".format(model_type)) epoch_times = [] # Start training loop for epoch in range(1,EPOCHS+1): start_time = time.perf_counter() h = model.init_hidden(batch_size) avg_loss = 0. counter = 0 for x, label in train_loader: counter += 1 if model_type == "GRU": h = h.data else: h = tuple([e.data for e in h]) model.zero_grad() out, h = model(x.to(device).float(), h) loss = criterion(out, label.to(device).float()) loss.backward() optimizer.step() avg_loss += loss.item() if counter%200 == 0: print("Epoch {}......Step: {}/{}....... Average Loss for Epoch: {}".format(epoch, counter, len(train_loader), avg_loss/counter)) current_time = time.perf_counter() print("Epoch {}/{} Done, Total Loss: {}".format(epoch, EPOCHS, avg_loss/len(train_loader))) print("Time Elapsed for Epoch: {} seconds".format(str(current_time-start_time))) epoch_times.append(current_time-start_time) print("Total Training Time: {} seconds".format(str(sum(epoch_times)))) return model def evaluate(model, test_x, test_y, label_scalers): model.eval() outputs = [] targets = [] start_time = time.perf_counter() for i in test_x.keys(): inp = torch.from_numpy(np.array(test_x[i])) labs = torch.from_numpy(np.array(test_y[i])) h = model.init_hidden(inp.shape[0]) out, h = model(inp.to(device).float(), h) outputs.append(label_scalers[i].inverse_transform(out.cpu().detach().numpy()).reshape(-1)) targets.append(label_scalers[i].inverse_transform(labs.numpy()).reshape(-1)) print("Evaluation Time: {}".format(str(time.perf_counter()-start_time))) sMAPE = 0 for i in range(len(outputs)): sMAPE += np.mean(abs(outputs[i]-targets[i])/(targets[i]+outputs[i])/2)/len(outputs) print("sMAPE: {}%".format(sMAPE*100)) return outputs, targets, sMAPE #time模块在Python 3.x版本中已经将clock()方法废弃。应该使用time.perf_counter()或者time.process_time()方法来代替clock()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
3.模型训练
lr = 0.001
gru_model = train(train_loader, lr, model_type="GRU")
- 1
- 2
lstm_model = train(train_loader, lr, model_type="LSTM")
- 1
使用SMAPE评估模型
gru_outputs, targets, gru_sMAPE = evaluate(gru_model, test_x, test_y, label_scalers):
Evaluation Time: 26.02710079999997
sMAPE: 0.33592208657162453%
- 1
- 2
lstm_outputs, targets, lstm_sMAPE = evaluate(lstm_model, test_x, test_y, label_scalers):
Evaluation Time: 19.92910290000009
sMAPE: 0.38698768153562335%
- 1
- 2
两者性能相近,lstm较优,但是并没有明显的区别
参考文献
[1] Lin, Zhihui, et al. “Self-Attention CONVLSTM for Spatiotemporal Prediction.” Proceedings of the AAAI Conference on Artificial Intelligence, ojs.aaai.org/index.php/AAAI/article/view/6819. Accessed 4 Jan. 2020.

