
- 1gitlab 查看分支从那个分支拉取的_阿里云Kubernetes服务上搭建GitLab+Jenkins应用发布模型的实践...
- 2protel DXP 2004_dxp2004sp2补丁
- 3知乎上有个热门问题,Python 未来会成为大众办公常用编程工具吗?_知乎 python在日常办公中的应用多吗
- 42024年最全python基础(条件判断,input,循环,break,continue),面试提问的问题及答案
- 5Elasticsearch-基础介绍及索引原理分析_elasticsearch索引原理
- 6物联网python开发实践_python 物联网
- 7在win10中编译chromium工程的稳定版本_chromium win7奔溃 win10不会
- 8LeetCode热题100——矩阵
- 9基于Spark的大规模推荐系统特征工程
- 10手机空号检测API接口怎么对接_运营商手机号空号检测api接口快速对接
【技术博客】NMPC非线性模型预测控制算法实现无人船轨迹跟踪与障碍物避碰详解及文献复现_nmpc无人船
赞
踩
文献复现基于非线性模型预测控制NMPC的无人船,无人艇的轨迹跟踪控制和障碍物避碰
该算法包含Matlab编写的非线性模型预测控制Nonlinear model predictive control 的无人船轨迹跟踪和障碍物避碰算法trajectory tracking and collision avoidance ,有详细的注释和参考文献。
附使用说明。
ID:3729757389486719
石榴红的中棉as
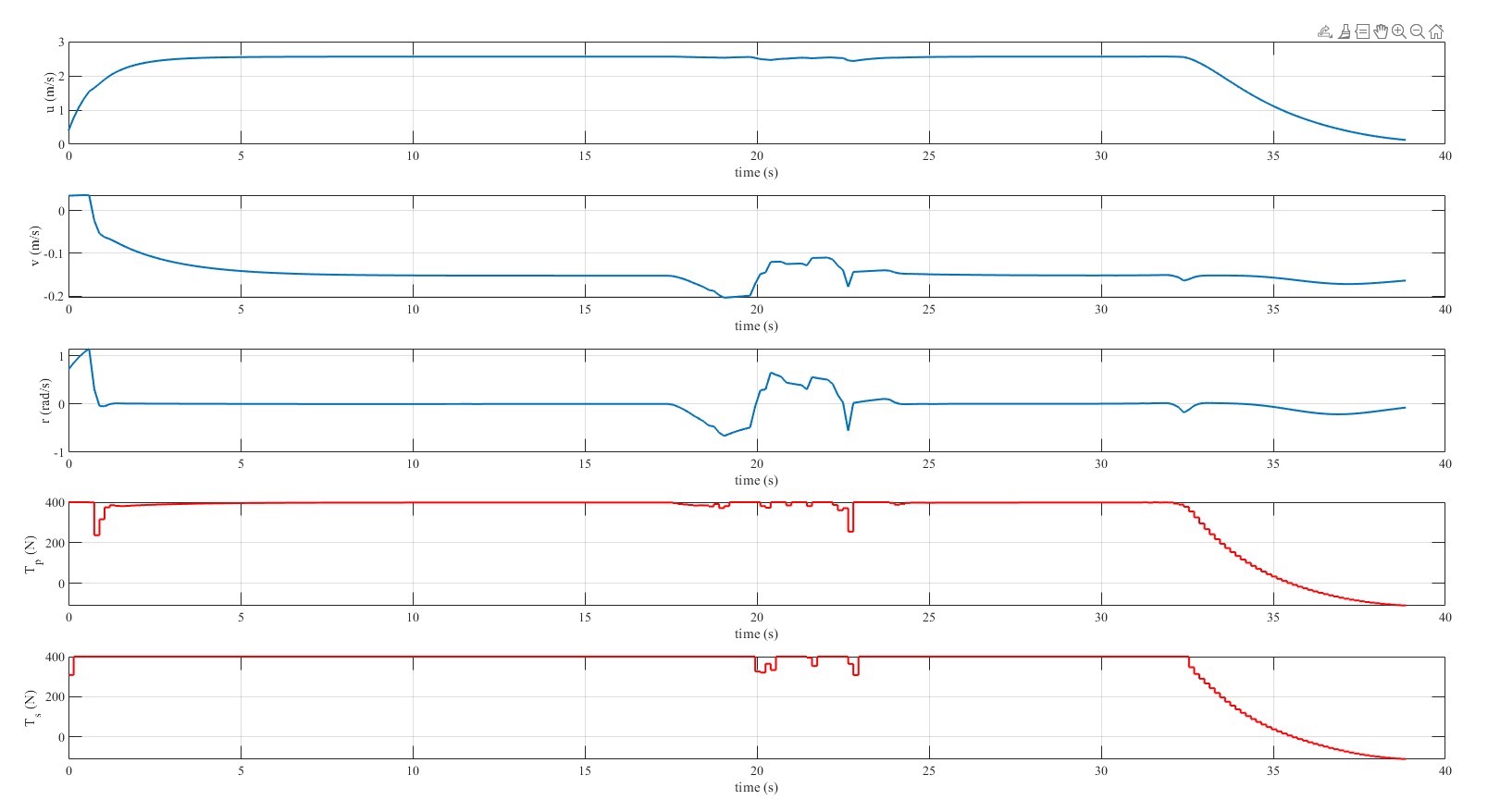
非线性模型预测控制(Nonlinear Model Predictive Control,NMPC)作为一种先进的自动控制技术,在无人船和无人艇的轨迹跟踪控制和障碍物避碰方面展现出了出色的性能。本文通过复现基于非线性模型预测控制的无人船和无人艇轨迹跟踪控制和障碍物避碰算法,并对该算法的性能进行详细的分析和讨论。
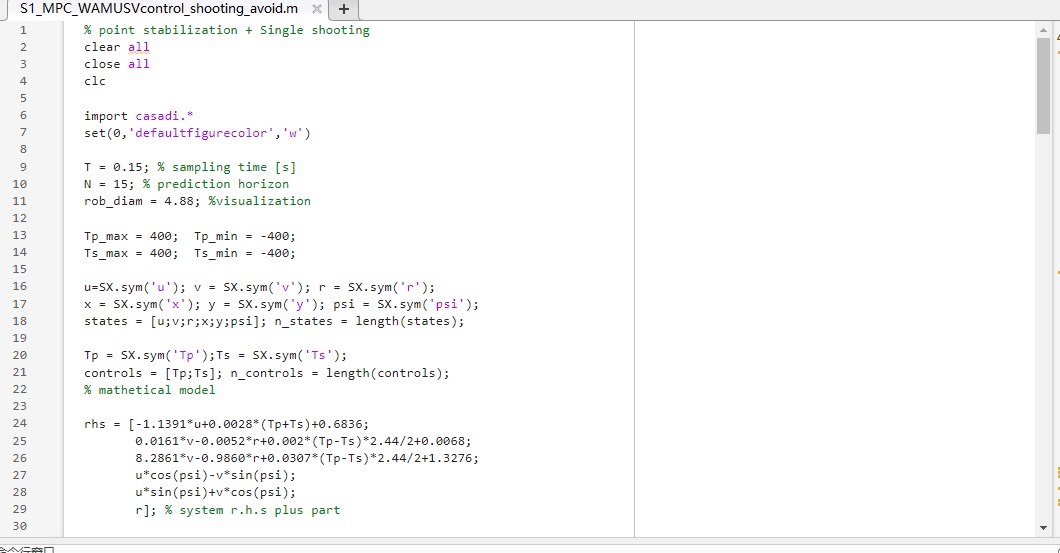
该算法的核心是使用Matlab编写的非线性模型预测控制技术。非线性模型预测控制是一种基于最优控制原理的先进控制方法,能够通过优化控制输入序列来使系统达到期望的轨迹跟踪效果,并在遇到障碍物时进行实时的避碰决策。
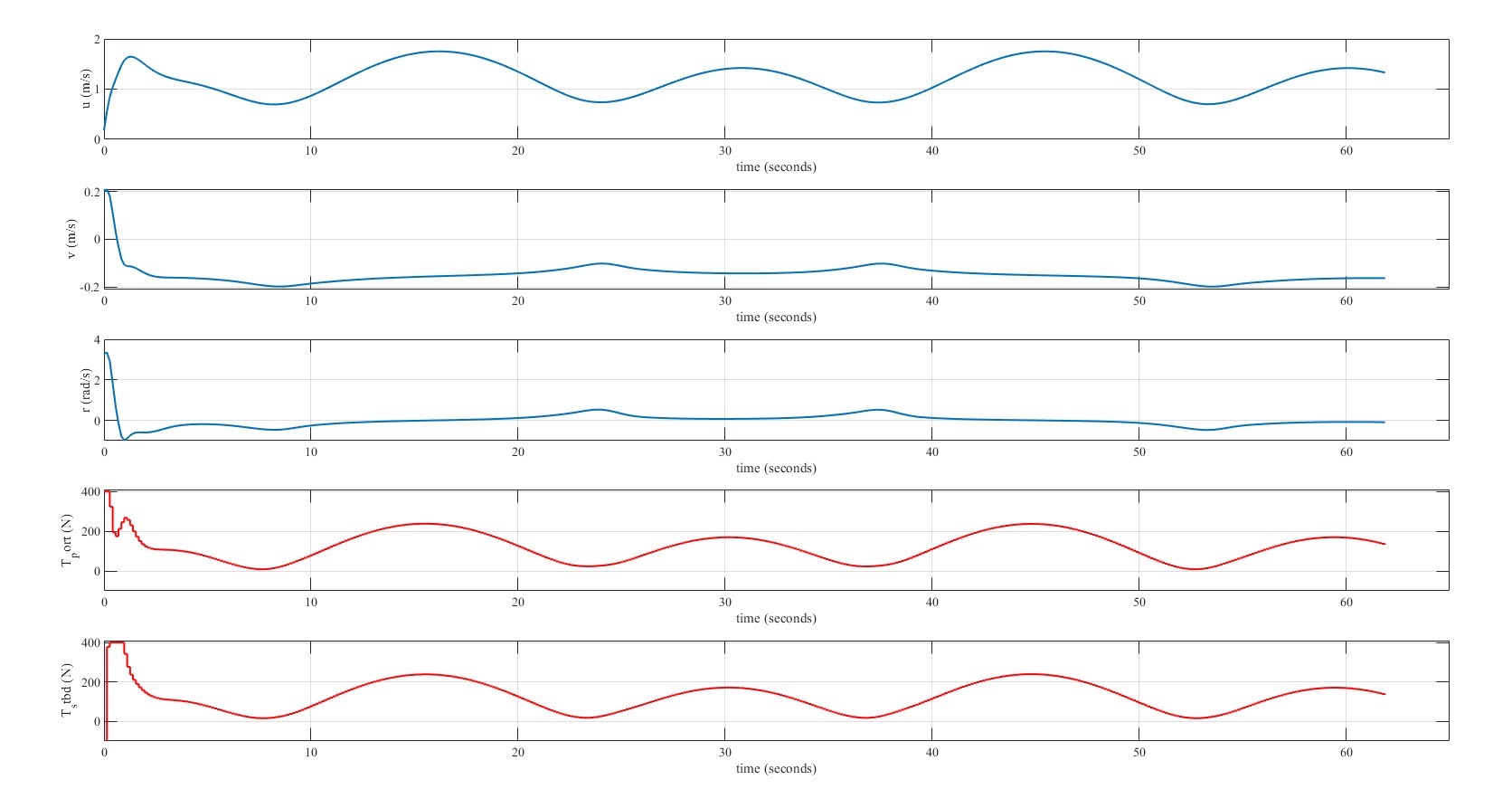
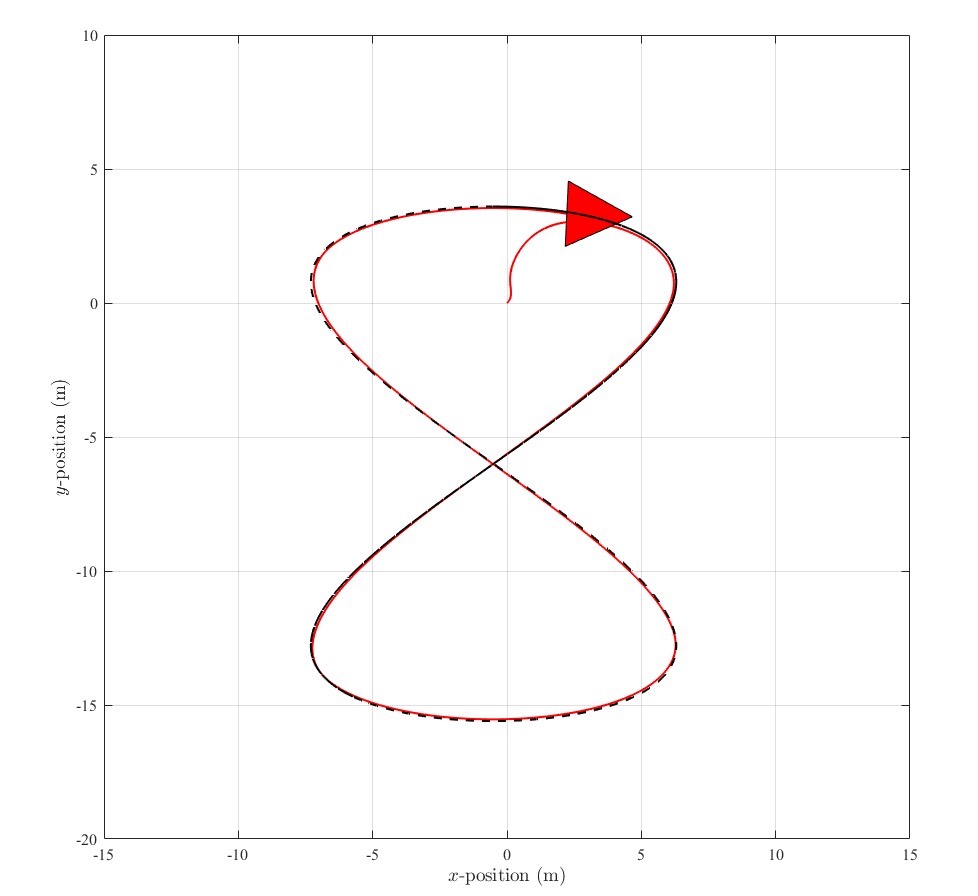
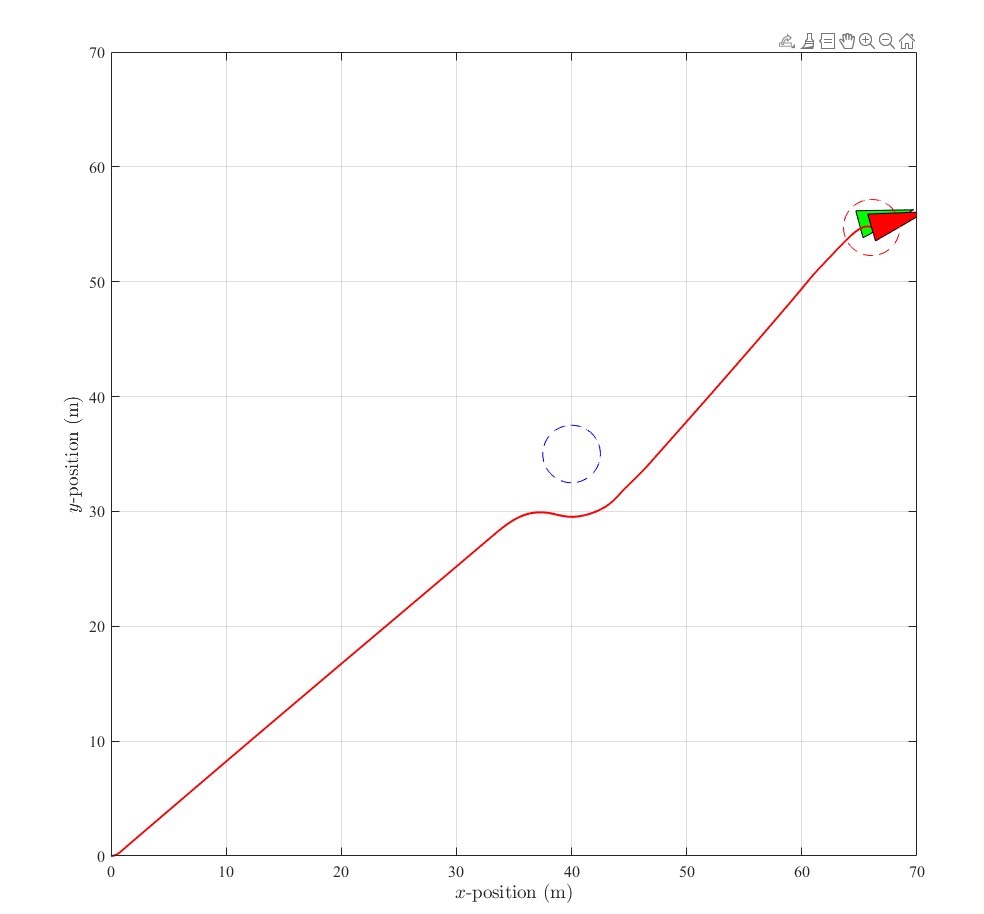
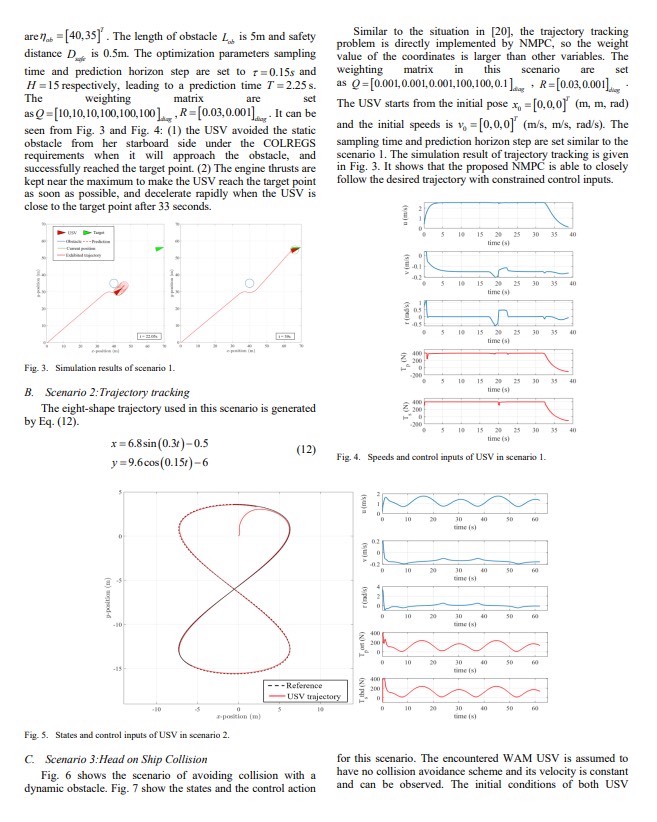
在无人船和无人艇的轨迹跟踪控制中,非线性模型预测控制算法首先对目标轨迹进行拟合,得到系统的状态空间模型。然后,通过预测当前状态下的系统行为,生成最优的控制输入序列。最后,根据控制输入序列中的第一个控制指令,实时地对无人船或无人艇进行控制,以实现对目标轨迹的跟踪。
为了实现在遇到障碍物时的实时避碰决策,该算法还考虑了碰撞风险的评估。通过对预测轨迹和障碍物的关系进行建模,可以根据算法中设定的安全距离来评估与障碍物的碰撞风险。若存在碰撞风险,则算法会对控制输入序列进行调整,以避免与障碍物发生碰撞。
在实际应用中,该算法经过详细的注释和参考文献的支持,使得算法的使用和理解更加方便。使用说明中详细介绍了算法的输入输出及调用方法,帮助用户轻松地应用该算法到无人船和无人艇的轨迹跟踪控制和障碍物避碰问题中。
总之,基于非线性模型预测控制的无人船和无人艇轨迹跟踪控制和障碍物避碰算法具有较高的性能和实用性。通过该算法,无人船和无人艇可以在复杂环境下精确跟踪目标轨迹,并在遇到障碍物时快速做出避碰决策,保证了系统的安全性和稳定性。在未来的研究中,我们可以进一步优化算法的性能,以适应更加复杂和挑战性的应用场景。
(字数:646)
以上相关代码,程序地址:http://wekup.cn/757389486719.html

