
- 1日常运维(1)w命令,vmstat命令,top命令,sar命令,nload命令_vmstat -w 1
- 2git pull 提示Not possible to fast-forward,无法提交也无法更新
- 3Tensorflow--MNIST分类模型_mnist模型
- 4Flink checkpoint机制_flink sql采集checkpoint
- 5大模型从入门到应用——LangChain:模型(Models)-[大型语言模型(LLMs):基础知识]_langchain model适配
- 6JDBC 设置超时时间,避免sql查询时时间过长_jdbc超时时间
- 7MySql事务_read view 匹配条件规则
- 8Oracle 数据去重_oracle去重查询
- 9深入OceanBase分布式数据库:MySQL 模式下的 SQL 基本操作_oceanbase mysql
- 10实用干货丨Eolink Apikit 配置和告警规则的各种用法
【ROS2】中级:URDF-从头开始构建可见机器人模型
赞
踩
URDF(统一机器人描述格式)是一种用于在 ROS 中指定机器人几何和组织的文件格式。
从头开始构建可见机器人模型
构建一个可移动的机器人模型
添加物理和碰撞属性
使用 Xacro 清理您的代码
使用 URDF 与
robot_state_publisher生成 URDF 文件
从头开始构建visual机器人模型
目标:学习如何构建一个可以在 Rviz 中查看的机器人visual模型
教程级别:中级
时间:20 分钟
目录
一种形状
多种形状
起源
材质女孩
完成模型
便条
本教程假设您知道如何编写格式良好的 XML 代码
在本教程中,我们将构建一个大致看起来像 R2D2 的机器人视觉模型。在后续教程中,您将学习如何表达模型 https://docs.ros.org/en/jazzy/Tutorials/Intermediate/URDF/Building-a-Movable-Robot-Model-with-URDF.html ,添加一些物理属性 https://docs.ros.org/en/jazzy/Tutorials/Intermediate/URDF/Adding-Physical-and-Collision-Properties-to-a-URDF-Model.html ,并使用 xacro 生成更整洁的代码 https://docs.ros.org/en/jazzy/Tutorials/Intermediate/URDF/Using-Xacro-to-Clean-Up-a-URDF-File.html ,但现在,我们将专注于使视觉几何正确。
在继续之前,请确保已安装 joint_state_publisher 软件包https://index.ros.org/p/joint_state_publisher 。如果您安装了 urdf_tutorial 二进制文件 https://index.ros.org/p/urdf_tutorial/ ,这应该已经是这种情况。如果没有,请更新您的安装以包含该软件包(使用 rosdep 进行检查)。
本教程中提到的所有机器人模型(以及源文件)都可以在 urdf_tutorial 包中找到。https://github.com/ros/urdf_tutorial/tree/ros2/ 源码下载
一种形状
首先,我们将探索一个简单的形状。这是你能制作的最简单的 urdf 之一。[来源:01-myfirst.urdf]
- <?xml version="1.0"?> <!-- 声明 XML 版本为 1.0 -->
- <robot name="myfirst"> <!-- 定义一个名为 "myfirst" 的机器人 -->
- <link name="base_link"> <!-- 定义一个名为 "base_link" 的链接 -->
- <visual> <!-- 定义视觉元素 -->
- <geometry> <!-- 定义几何形状 -->
- <cylinder length="0.6" radius="0.2"/> <!-- 定义一个长度为 0.6,半径为 0.2 的圆柱体 -->
- </geometry>
- </visual>
- </link>
- </robot>
要将 XML 翻译成英文,这是一个名为 myfirst 的机器人,它只包含一个Link(即部分),其视觉组件只是一个长 0.6 米、半径 0.2 米的圆柱体。这对于一个简单的“hello world”类型的示例来说,可能看起来有很多封闭标签,但它会变得更复杂,相信我。
要检查模型,请启动 display.launch.py 文件:
- from launch import LaunchDescription # 从launch模块导入LaunchDescription类
- from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription # 从launch.actions模块导入DeclareLaunchArgument和IncludeLaunchDescription类
- from launch.substitutions import LaunchConfiguration, PathJoinSubstitution # 从launch.substitutions模块导入LaunchConfiguration和PathJoinSubstitution类
- from launch_ros.substitutions import FindPackageShare # 从launch_ros.substitutions模块导入FindPackageShare类
-
-
- def generate_launch_description(): # 定义一个名为generate_launch_description的函数
- ld = LaunchDescription() # 创建一个LaunchDescription对象
-
-
- urdf_tutorial_path = FindPackageShare('urdf_tutorial') # 查找urdf_tutorial包的共享路径
- default_model_path = PathJoinSubstitution(['urdf', '01-myfirst.urdf']) # 拼接默认的URDF模型路径
- default_rviz_config_path = PathJoinSubstitution([urdf_tutorial_path, 'rviz', 'urdf.rviz']) # 拼接默认的RViz配置文件路径
-
-
- # 这些参数是为了向后兼容而保留的
- gui_arg = DeclareLaunchArgument(name='gui', default_value='true', choices=['true', 'false'],
- description='Flag to enable joint_state_publisher_gui') # 声明一个名为gui的启动参数,默认值为true,可选值为true或false,描述为启用joint_state_publisher_gui的标志
- ld.add_action(gui_arg) # 将gui_arg添加到LaunchDescription对象中
- rviz_arg = DeclareLaunchArgument(name='rvizconfig', default_value=default_rviz_config_path,
- description='Absolute path to rviz config file') # 声明一个名为rvizconfig的启动参数,默认值为default_rviz_config_path,描述为RViz配置文件的绝对路径
- ld.add_action(rviz_arg) # 将rviz_arg添加到LaunchDescription对象中
-
-
- # 这个参数的含义与以前的版本略有不同
- ld.add_action(DeclareLaunchArgument(name='model', default_value=default_model_path,
- description='Path to robot urdf file relative to urdf_tutorial package')) # 声明一个名为model的启动参数,默认值为default_model_path,描述为相对于urdf_tutorial包的机器人URDF文件路径
-
-
- ld.add_action(IncludeLaunchDescription(
- PathJoinSubstitution([FindPackageShare('urdf_launch'), 'launch', 'display.launch.py']), # 包含另一个启动文件display.launch.py
- launch_arguments={
- 'urdf_package': 'urdf_tutorial', # 设置urdf_package参数为urdf_tutorial
- 'urdf_package_path': LaunchConfiguration('model'), # 设置urdf_package_path参数为model启动参数的值
- 'rviz_config': LaunchConfiguration('rvizconfig'), # 设置rviz_config参数为rvizconfig启动参数的值
- 'jsp_gui': LaunchConfiguration('gui')}.items() # 设置jsp_gui参数为gui启动参数的值
- ))
-
-
- return ld # 返回LaunchDescription对

- # display.launch.py
- from launch import LaunchDescription
- from launch.actions import DeclareLaunchArgument
- from launch.actions import IncludeLaunchDescription
- from launch.conditions import IfCondition, UnlessCondition
- from launch.substitutions import LaunchConfiguration, PathJoinSubstitution
-
-
- from launch_ros.actions import Node
- from launch_ros.substitutions import FindPackageShare
-
-
- # 生成启动描述函数
- def generate_launch_description():
- ld = LaunchDescription() # 创建一个LaunchDescription对象
-
-
- urdf_launch_package = FindPackageShare('urdf_launch') # 查找urdf_launch包的共享路径
-
-
- # 添加启动参数,用于启用joint_state_publisher_gui
- ld.add_action(DeclareLaunchArgument(name='jsp_gui', default_value='true', choices=['true', 'false'],
- description='Flag to enable joint_state_publisher_gui'))
-
-
- # 设置rviz配置文件的默认路径
- default_rviz_config_path = PathJoinSubstitution([urdf_launch_package, 'config', 'urdf.rviz'])
- ld.add_action(DeclareLaunchArgument(name='rviz_config', default_value=default_rviz_config_path,
- description='Absolute path to rviz config file'))
-
-
- # 由于https://github.com/ros2/launch/issues/313,需要手动传递配置
- ld.add_action(IncludeLaunchDescription(
- PathJoinSubstitution([urdf_launch_package, 'launch', 'description.launch.py']),
- launch_arguments={
- 'urdf_package': LaunchConfiguration('urdf_package'),
- 'urdf_package_path': LaunchConfiguration('urdf_package_path')}.items()
- ))
-
-
- # 根据gui参数,启动joint_state_publisher或joint_state_publisher_gui
- ld.add_action(Node(
- package='joint_state_publisher',
- executable='joint_state_publisher',
- condition=UnlessCondition(LaunchConfiguration('jsp_gui'))
- ))
-
-
- ld.add_action(Node(
- package='joint_state_publisher_gui',
- executable='joint_state_publisher_gui',
- condition=IfCondition(LaunchConfiguration('jsp_gui'))
- ))
-
-
- # 启动rviz2节点
- ld.add_action(Node(
- package='rviz2',
- executable='rviz2',
- output='screen',
- arguments=['-d', LaunchConfiguration('rviz_config')],
- ))
- return ld # 返回LaunchDescription对象
ros2 launch urdf_tutorial display.launch.py model:=urdf/01-myfirst.urdf这做了三件事:
加载指定的模型并将其保存为
robot_state_publisher节点的参数。运行节点以发布 sensor_msgs/msg/JointState 和变换(稍后会详细介绍)
使用配置文件启动 Rviz
启动 display.launch.py 后,您应该会看到 RViz 显示以下内容:
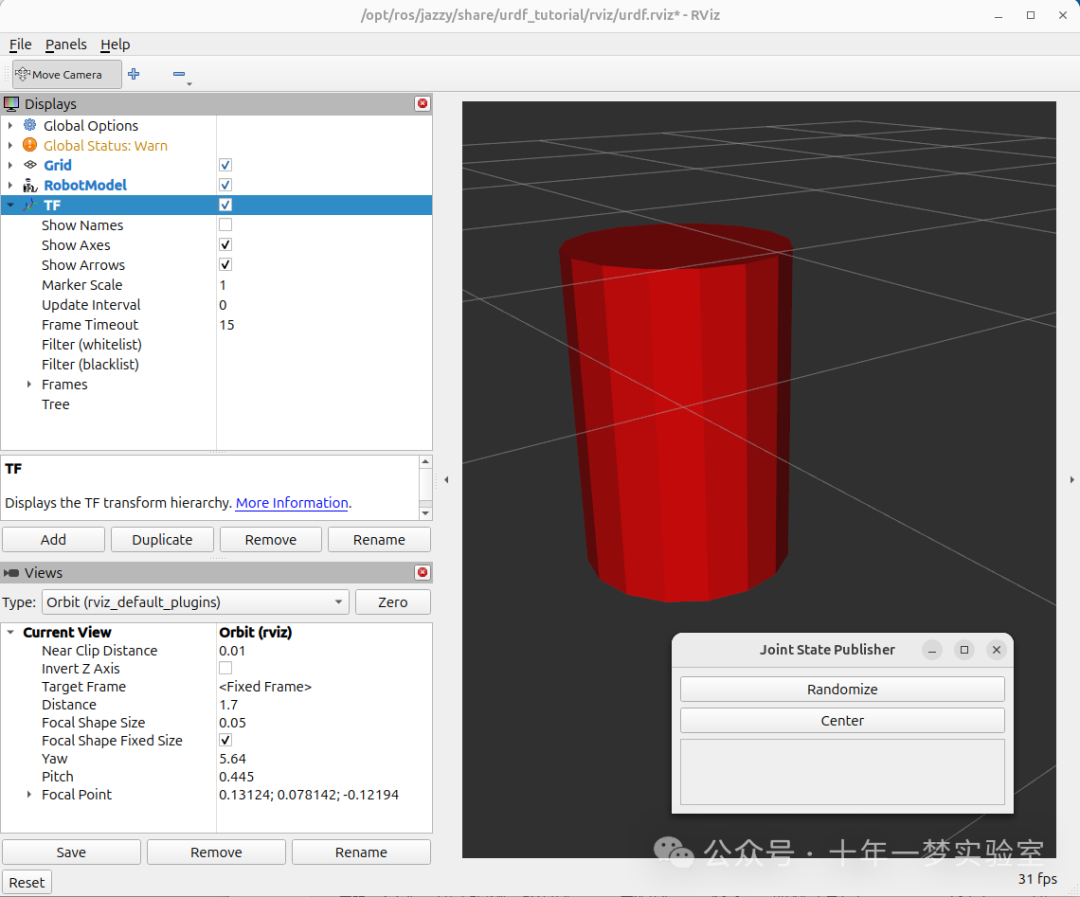
注意事项:
固定框架是网格中心所在的变换框架。在这里,它是由我们的一个链接 base_link 定义的框架。
视觉元素(圆柱体)的原点默认位于其几何中心。因此,圆柱体的一半位于网格下方。
多种形状
现在让我们看看如何添加多个形状/链接。如果我们只是向 urdf 中添加更多的链接元素,解析器将不知道将它们放在哪里。因此,我们必须添加关节。关节元素可以指灵活和不灵活的关节。我们将从不灵活的或固定的关节开始。[来源:02-multipleshapes.urdf]
- <?xml version="1.0"?>
- <!-- 定义XML版本 -->
- <robot name="multipleshapes">
- <!-- 定义机器人名称为multipleshapes -->
- <link name="base_link">
- <!-- 定义一个名为base_link的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.6" radius="0.2"/>
- <!-- 定义一个圆柱体,长度为0.6,半径为0.2 -->
- </geometry>
- </visual>
- </link>
-
-
- <link name="right_leg">
- <!-- 定义一个名为right_leg的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.6 0.1 0.2"/>
- <!-- 定义一个长方体,尺寸为0.6x0.1x0.2 -->
- </geometry>
- </visual>
- </link>
-
-
- <joint name="base_to_right_leg" type="fixed">
- <!-- 定义一个名为base_to_right_leg的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="right_leg"/>
- <!-- 定义子链接为right_leg -->
- </joint>
-
-
- </robot>
- <!-- 结束机器人定义 -->
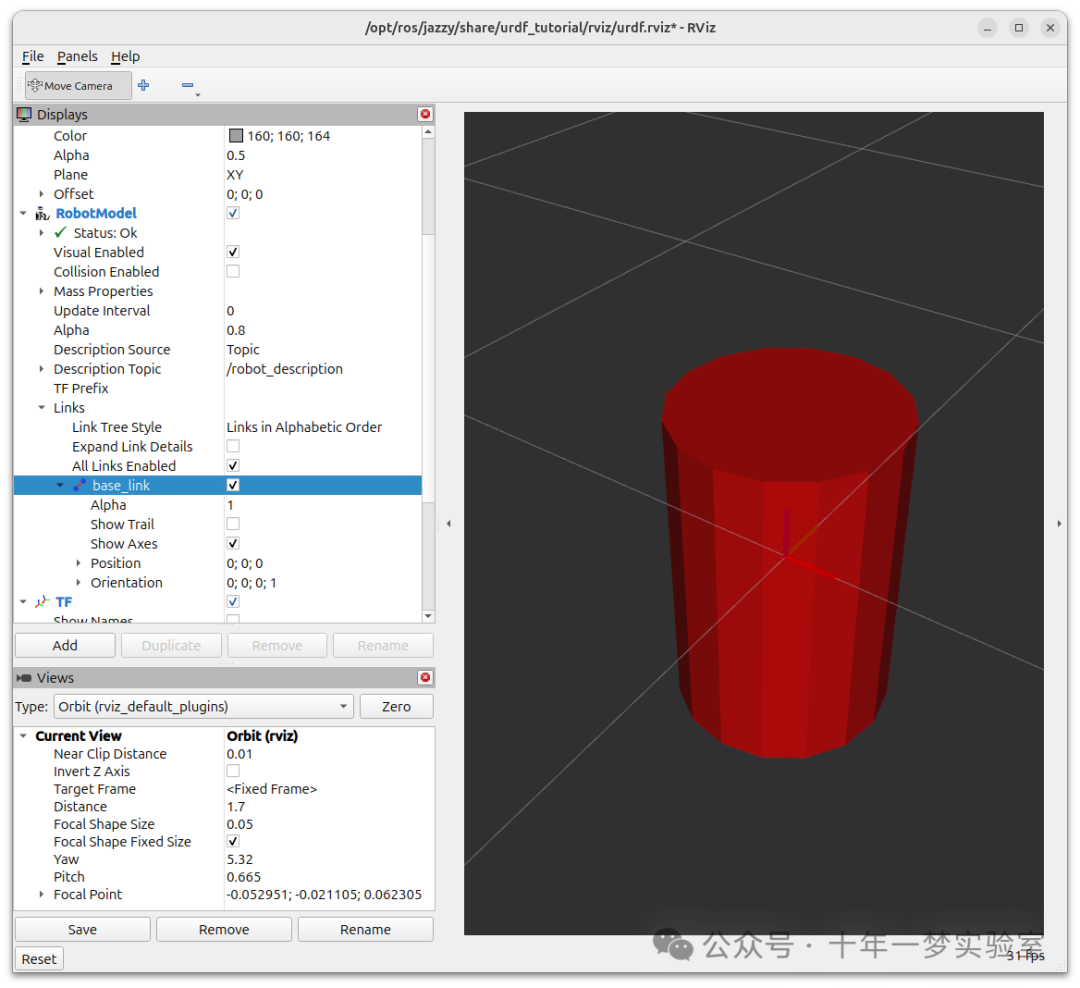
注意我们如何定义一个 0.6 米 x 0.1 米 x 0.2 米的盒子。
关节是根据父节点和子节点来定义的。URDF 最终是一个具有一个根链接的树结构。这意味着腿的位置取决于 base_link 的位置。
ros2 launch urdf_tutorial display.launch.py model:=urdf/02-multipleshapes.urdf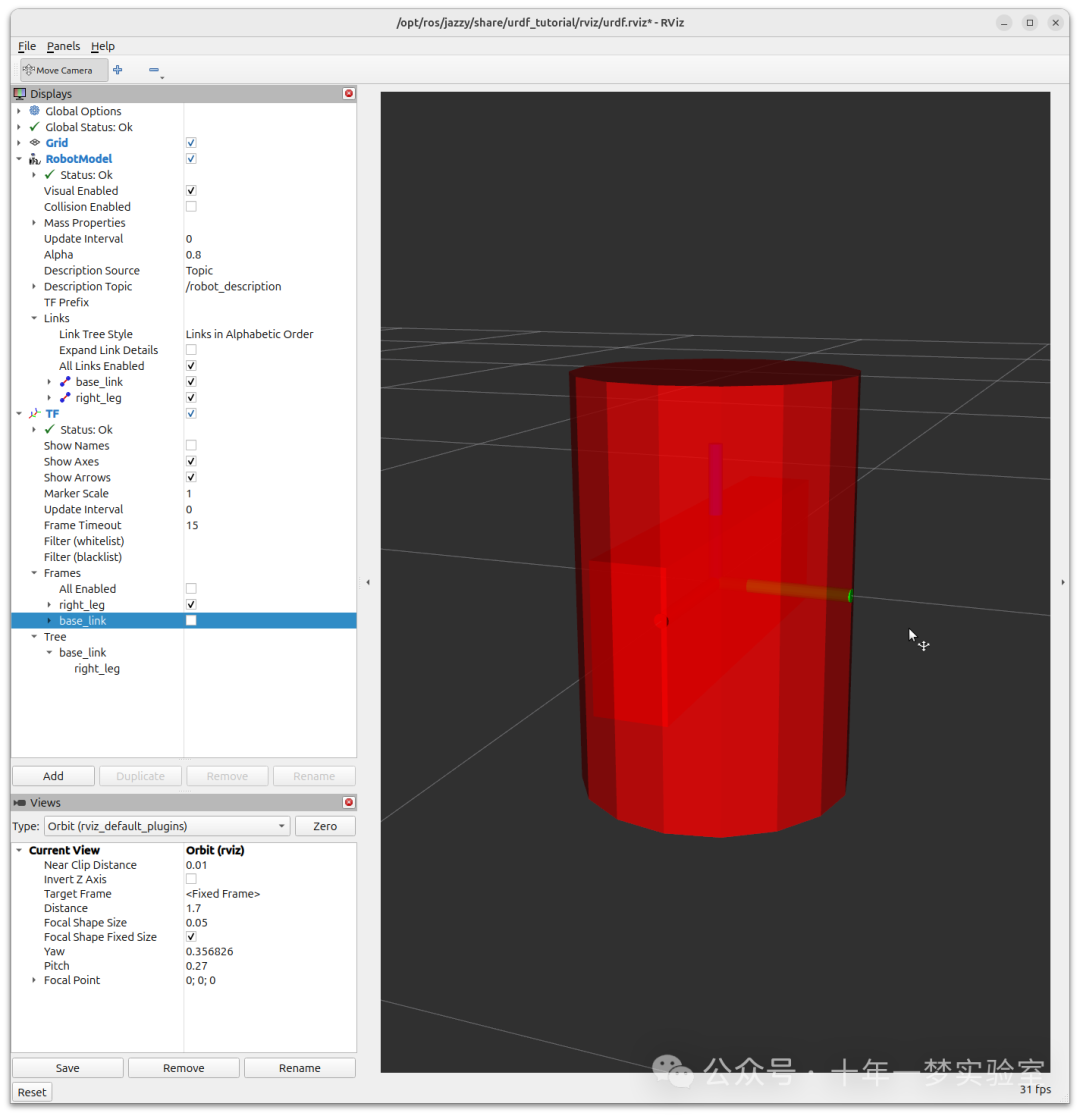
这两个形状彼此重叠,因为它们共享相同的原点。如果我们不希望它们重叠,我们必须定义更多的原点。
原点 Origin
R2D2 的腿连接到躯干的上半部分,在侧面。所以我们将关节的原点指定在那里。此外,它不是连接到腿的中间,而是连接到上部,所以我们也必须为腿的原点设置偏移。我们还将腿旋转,使其直立。[来源:03-origins.urdf]
- <?xml version="1.0"?>
- <robot name="origins">
- <!-- 定义一个名为base_link的链接 -->
- <link name="base_link">
- <visual>
- <geometry>
- <!-- 定义一个圆柱体,长度为0.6,半径为0.2 -->
- <cylinder length="0.6" radius="0.2"/>
- </geometry>
- </visual>
- </link>
-
-
- <!-- 定义一个名为right_leg的链接 -->
- <link name="right_leg">
- <visual>
- <geometry>
- <!-- 定义一个长方体,尺寸为0.6 0.1 0.2 -->
- <box size="0.6 0.1 0.2"/>
- </geometry>
- <!-- 设置视觉元素的原点,绕Y轴旋转90度,沿Z轴平移-0.3 -->
- <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
- </visual>
- </link>
-
-
- <!-- 定义一个名为base_to_right_leg的固定关节 -->
- <joint name="base_to_right_leg" type="fixed">
- <!-- 父链接为base_link -->
- <parent link="base_link"/>
- <!-- 子链接为right_leg -->
- <child link="right_leg"/>
- <!-- 设置关节的原点,沿Y轴平移-0.22,沿Z轴平移0.25 -->
- <origin xyz="0 -0.22 0.25"/>
- </joint>
-
-
- </robot>
让我们首先检查关节的原点。它是根据父参考系定义的。因此,我们在 y 方向上是 -0.22 米(向我们的左边,但相对于轴向右),在 z 方向上是 0.25 米(向上)。这意味着子 link 的原点将向上和向右,无论子链接的视觉原点标签如何。由于我们没有指定 rpy(滚转俯仰偏航)属性,子框架默认将具有与父框架相同的方向。
现在,看看腿的视觉原点,它有一个 xyz 和 rpy 偏移。这定义了视觉元素的中心相对于其原点的位置。由于我们希望腿部连接在顶部,我们通过将 z 偏移设置为 -0.3 米来向下偏移原点。由于我们希望腿的长部分与 z 轴平行,我们将视觉部分绕 Y 轴旋转 PI/2。
ros2 launch urdf_tutorial display.launch.py model:=urdf/03-origins.urdf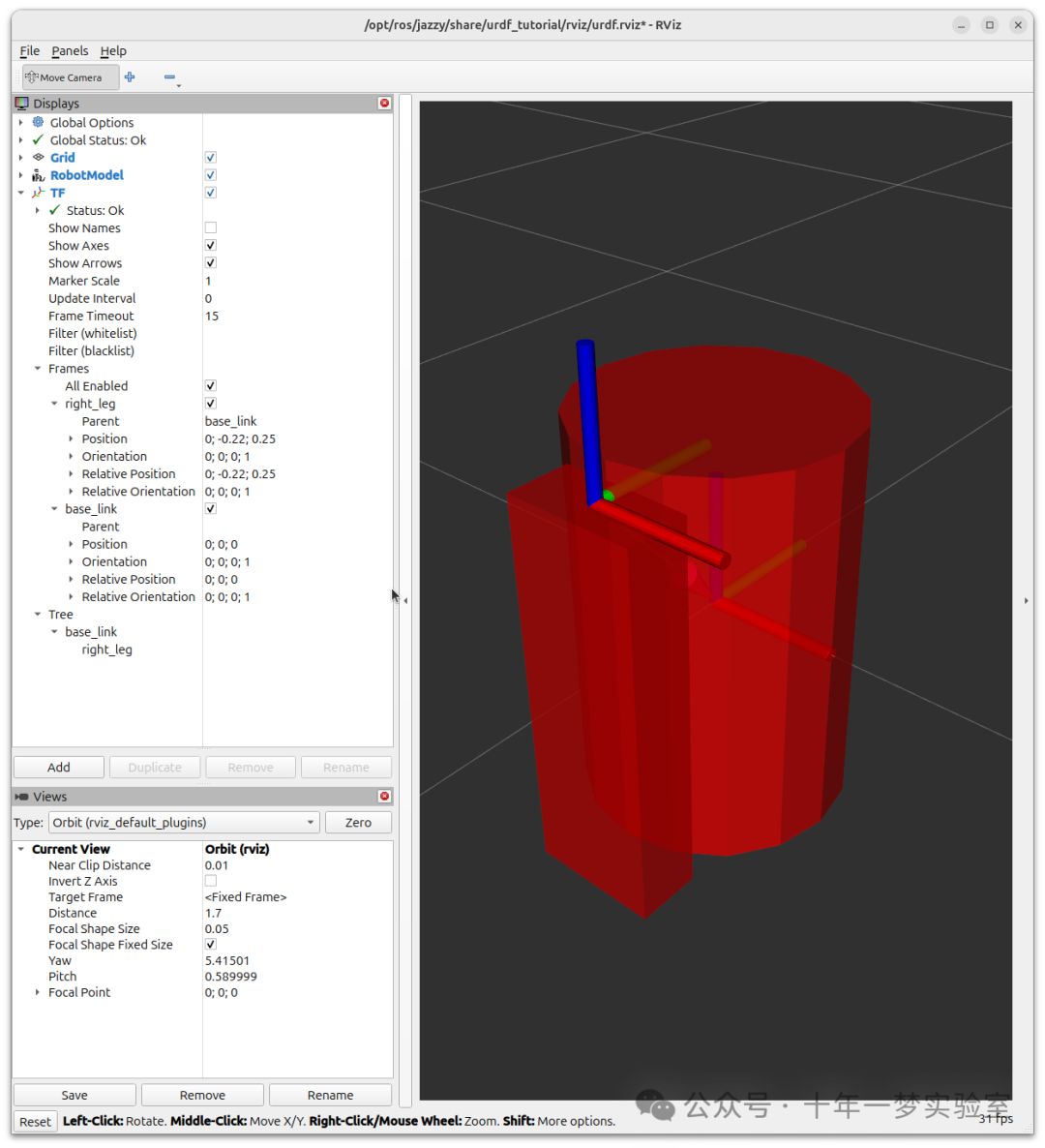
启动文件运行包,这些包将根据您的 URDF 为模型中的每个链接创建 TF 框架。Rviz 使用这些信息来确定显示每个形状的位置。
如果给定的 URDF 链接不存在 TF 框架,那么它将被放置在原点处显示为白色(参考相关问题)。
材质女孩
“好吧,”我听到你说。“那很可爱,但不是每个人都有 B21。我的机器人和 R2D2 不是红色的!” 这是一个很好的观点。让我们看看材质标签。[来源:04-materials.urdf]
- <?xml version="1.0"?>
- <!-- 定义XML版本 -->
- <robot name="materials">
- <!-- 定义机器人名称为materials -->
-
-
- <material name="blue">
- <!-- 定义一个名为blue的材质 -->
- <color rgba="0 0 0.8 1"/>
- <!-- 定义颜色为蓝色,RGBA值为(0, 0, 0.8, 1) -->
- </material>
-
-
- <material name="white">
- <!-- 定义一个名为white的材质 -->
- <color rgba="1 1 1 1"/>
- <!-- 定义颜色为白色,RGBA值为(1, 1, 1, 1) -->
- </material>
-
-
- <link name="base_link">
- <!-- 定义一个名为base_link的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.6" radius="0.2"/>
- <!-- 定义一个圆柱体,长度为0.6,半径为0.2 -->
- </geometry>
- <material name="blue"/>
- <!-- 使用名为blue的材质 -->
- </visual>
- </link>
-
-
- <link name="right_leg">
- <!-- 定义一个名为right_leg的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.6 0.1 0.2"/>
- <!-- 定义一个长方体,尺寸为0.6x0.1x0.2 -->
- </geometry>
- <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转1.57075弧度,绕z轴旋转0度,位置为(0, 0, -0.3) -->
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
-
-
- <joint name="base_to_right_leg" type="fixed">
- <!-- 定义一个名为base_to_right_leg的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="right_leg"/>
- <!-- 定义子链接为right_leg -->
- <origin xyz="0 -0.22 0.25"/>
- <!-- 定义关节的原点,位置为(0, -0.22, 0.25) -->
- </joint>
-
-
- <link name="left_leg">
- <!-- 定义一个名为left_leg的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.6 0.1 0.2"/>
- <!-- 定义一个长方体,尺寸为0.6x0.1x0.2 -->
- </geometry>
- <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转1.57075弧度,绕z轴旋转0度,位置为(0, 0, -0.3) -->
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
-
-
- <joint name="base_to_left_leg" type="fixed">
- <!-- 定义一个名为base_to_left_leg的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="left_leg"/>
- <!-- 定义子链接为left_leg -->
- <origin xyz="0 0.22 0.25"/>
- <!-- 定义关节的原点,位置为(0, 0.22, 0.25) -->
- </joint>
-
-
- </robot>
- <!-- 结束机器人定义 -->
现在身体是蓝色的。我们定义了一种称为“蓝色”的新材料,其红色、绿色、蓝色和 alpha 通道分别定义为 0、0、0.8 和 1。所有值都可以在 [0,1] 范围内。然后,该材料由 base_link 的视觉元素引用。白色材料的定义类似。
您还可以在视觉元素中定义材料标签,甚至在其他链接中引用它。不过,即使您重新定义它,也不会有人抱怨。
您还可以使用纹理来指定用于为对象着色的图像文件
ros2 launch urdf_tutorial display.launch.py model:=urdf/04-materials.urdf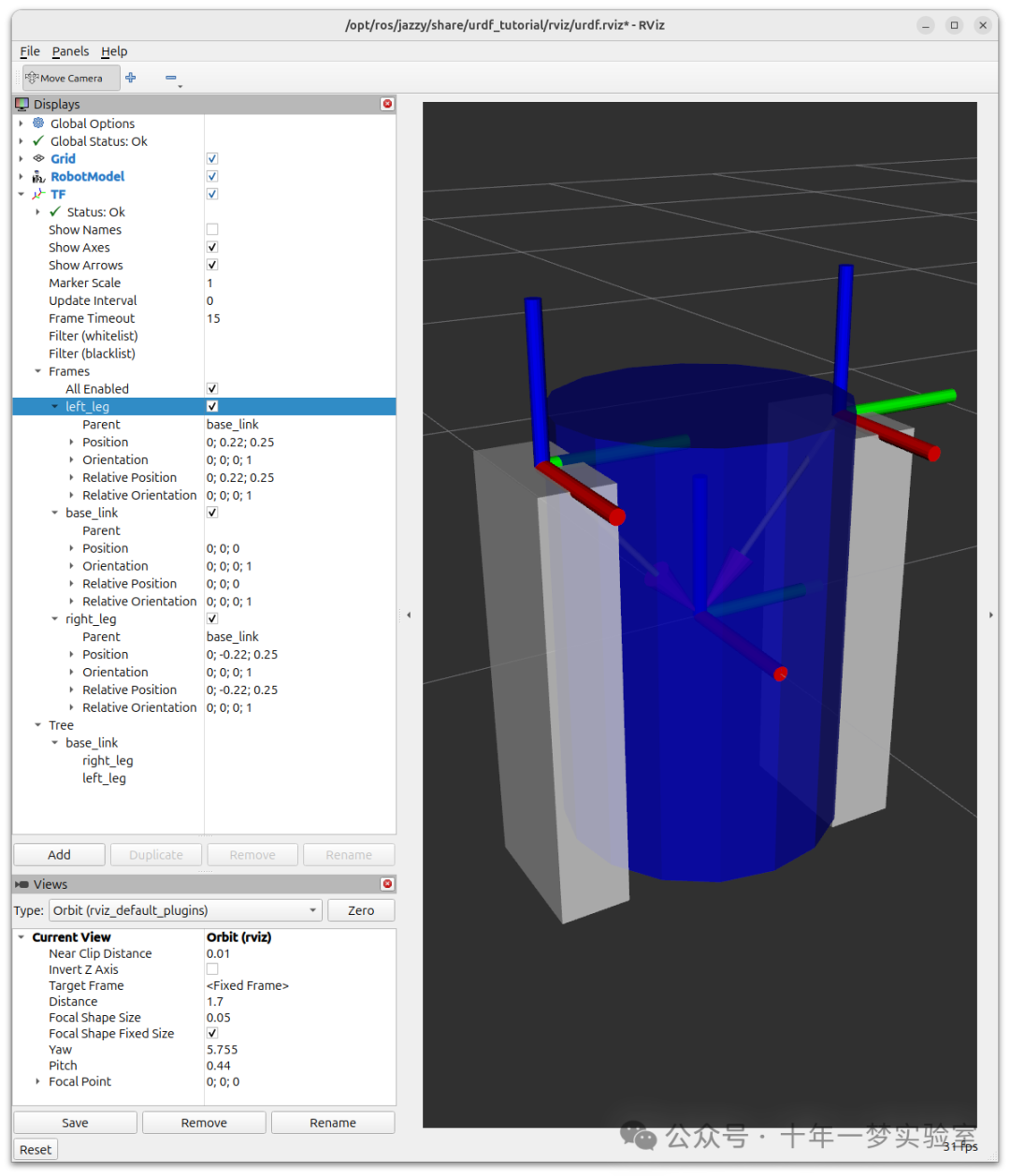
完成模型
现在我们用一些更多的形状来完成模型:脚、轮子和头。最值得注意的是,我们添加了一个球体和一些网格。我们还会添加一些其他的部件,以便以后使用。[来源:05-visual.urdf]
- <?xml version="1.0"?>
- <!-- 定义XML版本 -->
- <robot name="visual">
- <!-- 定义机器人名称为visual -->
-
-
- <material name="blue">
- <!-- 定义一个名为blue的材质 -->
- <color rgba="0 0 0.8 1"/>
- <!-- 定义颜色为蓝色,RGBA值为(0, 0, 0.8, 1) -->
- </material>
- <material name="black">
- <!-- 定义一个名为black的材质 -->
- <color rgba="0 0 0 1"/>
- <!-- 定义颜色为黑色,RGBA值为(0, 0, 0, 1) -->
- </material>
- <material name="white">
- <!-- 定义一个名为white的材质 -->
- <color rgba="1 1 1 1"/>
- <!-- 定义颜色为白色,RGBA值为(1, 1, 1, 1) -->
- </material>
-
-
- <link name="base_link">
- <!-- 定义一个名为base_link的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.6" radius="0.2"/>
- <!-- 定义一个圆柱体,长度为0.6,半径为0.2 -->
- </geometry>
- <material name="blue"/>
- <!-- 使用名为blue的材质 -->
- </visual>
- </link>
-
-
- <link name="right_leg">
- <!-- 定义一个名为right_leg的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.6 0.1 0.2"/>
- <!-- 定义一个长方体,尺寸为0.6x0.1x0.2 -->
- </geometry>
- <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转1.57075弧度,绕z轴旋转0度,位置为(0, 0, -0.3) -->
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
-
-
- <joint name="base_to_right_leg" type="fixed">
- <!-- 定义一个名为base_to_right_leg的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="right_leg"/>
- <!-- 定义子链接为right_leg -->
- <origin xyz="0 -0.22 0.25"/>
- <!-- 定义关节的原点,位置为(0, -0.22, 0.25) -->
- </joint>
-
-
- <link name="right_base">
- <!-- 定义一个名为right_base的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.4 0.1 0.1"/>
- <!-- 定义一个长方体,尺寸为0.4x0.1x0.1 -->
- </geometry>
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
-
-
- <joint name="right_base_joint" type="fixed">
- <!-- 定义一个名为right_base_joint的关节,类型为固定 -->
- <parent link="right_leg"/>
- <!-- 定义父链接为right_leg -->
- <child link="right_base"/>
- <!-- 定义子链接为right_base -->
- <origin xyz="0 0 -0.6"/>
- <!-- 定义关节的原点,位置为(0, 0, -0.6) -->
- </joint>
-
-
- <link name="right_front_wheel">
- <!-- 定义一个名为right_front_wheel的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="1.57075 0 0" xyz="0 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转1.57075弧度,绕y轴旋转0度,绕z轴旋转0度,位置为(0, 0, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.1" radius="0.035"/>
- <!-- 定义一个圆柱体,长度为0.1,半径为0.035 -->
- </geometry>
- <material name="black"/>
- <!-- 使用名为black的材质 -->
- </visual>
- </link>
- <joint name="right_front_wheel_joint" type="fixed">
- <!-- 定义一个名为right_front_wheel_joint的关节,类型为固定 -->
- <parent link="right_base"/>
- <!-- 定义父链接为right_base -->
- <child link="right_front_wheel"/>
- <!-- 定义子链接为right_front_wheel -->
- <origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
- <!-- 定义关节的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(0.133333333333, 0, -0.085) -->
- </joint>
-
-
- <link name="right_back_wheel">
- <!-- 定义一个名为right_back_wheel的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="1.57075 0 0" xyz="0 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转1.57075弧度,绕y轴旋转0度,绕z轴旋转0度,位置为(0, 0, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.1" radius="0.035"/>
- <!-- 定义一个圆柱体,长度为0.1,半径为0.035 -->
- </geometry>
- <material name="black"/>
- <!-- 使用名为black的材质 -->
- </visual>
- </link>
- <joint name="right_back_wheel_joint" type="fixed">
- <!-- 定义一个名为right_back_wheel_joint的关节,类型为固定 -->
- <parent link="right_base"/>
- <!-- 定义父链接为right_base -->
- <child link="right_back_wheel"/>
- <!-- 定义子链接为right_back_wheel -->
- <origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
- <!-- 定义关节的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(-0.133333333333, 0, -0.085) -->
- </joint>
-
-
- <link name="left_leg">
- <!-- 定义一个名为left_leg的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.6 0.1 0.2"/>
- <!-- 定义一个长方体,尺寸为0.6x0.1x0.2 -->
- </geometry>
- <origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转1.57075弧度,绕z轴旋转0度,位置为(0, 0, -0.3) -->
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
-
-
- <joint name="base_to_left_leg" type="fixed">
- <!-- 定义一个名为base_to_left_leg的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="left_leg"/>
- <!-- 定义子链接为left_leg -->
- <origin xyz="0 0.22 0.25"/>
- <!-- 定义关节的原点,位置为(0, 0.22, 0.25) -->
- </joint>
-
-
- <link name="left_base">
- <!-- 定义一个名为left_base的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.4 0.1 0.1"/>
- <!-- 定义一个长方体,尺寸为0.4x0.1x0.1 -->
- </geometry>
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
-
-
- <joint name="left_base_joint" type="fixed">
- <!-- 定义一个名为left_base_joint的关节,类型为固定 -->
- <parent link="left_leg"/>
- <!-- 定义父链接为left_leg -->
- <child link="left_base"/>
- <!-- 定义子链接为left_base -->
- <origin xyz="0 0 -0.6"/>
- <!-- 定义关节的原点,位置为(0, 0, -0.6) -->
- </joint>
-
-
- <link name="left_front_wheel">
- <!-- 定义一个名为left_front_wheel的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="1.57075 0 0" xyz="0 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转1.57075弧度,绕y轴旋转0度,绕z轴旋转0度,位置为(0, 0, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.1" radius="0.035"/>
- <!-- 定义一个圆柱体,长度为0.1,半径为0.035 -->
- </geometry>
- <material name="black"/>
- <!-- 使用名为black的材质 -->
- </visual>
- </link>
- <joint name="left_front_wheel_joint" type="fixed">
- <!-- 定义一个名为left_front_wheel_joint的关节,类型为固定 -->
- <parent link="left_base"/>
- <!-- 定义父链接为left_base -->
- <child link="left_front_wheel"/>
- <!-- 定义子链接为left_front_wheel -->
- <origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
- <!-- 定义关节的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(0.133333333333, 0, -0.085) -->
- </joint>
-
-
- <link name="left_back_wheel">
- <!-- 定义一个名为left_back_wheel的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="1.57075 0 0" xyz="0 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转1.57075弧度,绕y轴旋转0度,绕z轴旋转0度,位置为(0, 0, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.1" radius="0.035"/>
- <!-- 定义一个圆柱体,长度为0.1,半径为0.035 -->
- </geometry>
- <material name="black"/>
- <!-- 使用名为black的材质 -->
- </visual>
- </link>
- <joint name="left_back_wheel_joint" type="fixed">
- <!-- 定义一个名为left_back_wheel_joint的关节,类型为固定 -->
- <parent link="left_base"/>
- <!-- 定义父链接为left_base -->
- <child link="left_back_wheel"/>
- <!-- 定义子链接为left_back_wheel -->
- <origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
- <!-- 定义关节的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(-0.133333333333, 0, -0.085) -->
- </joint>
-
-
- <joint name="gripper_extension" type="fixed">
- <!-- 定义一个名为gripper_extension的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="gripper_pole"/>
- <!-- 定义子链接为gripper_pole -->
- <origin rpy="0 0 0" xyz="0.19 0 0.2"/>
- <!-- 定义关节的原点,位置为(0.19, 0, 0.2) -->
- </joint>
-
-
- <link name="gripper_pole">
- <!-- 定义一个名为gripper_pole的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <cylinder length="0.2" radius="0.01"/>
- <!-- 定义一个圆柱体,长度为0.2,半径为0.01 -->
- </geometry>
- <origin rpy="0 1.57075 0" xyz="0.1 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转1.57075弧度,绕z轴旋转0度,位置为(0.1, 0, 0) -->
- </visual>
- </link>
-
-
- <joint name="left_gripper_joint" type="fixed">
- <!-- 定义一个名为left_gripper_joint的关节,类型为固定 -->
- <origin rpy="0 0 0" xyz="0.2 0.01 0"/>
- <!-- 定义关节的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(0.2, 0.01, 0) -->
- <parent link="gripper_pole"/>
- <!-- 定义父链接为gripper_pole -->
- <child link="left_gripper"/>
- <!-- 定义子链接为left_gripper -->
- </joint>
-
-
- <link name="left_gripper">
- <!-- 定义一个名为left_gripper的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="0.0 0 0" xyz="0 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(0, 0, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
- <!-- 使用外部网格文件定义几何形状,文件路径为package://urdf_tutorial/meshes/l_finger.dae -->
- </geometry>
- </visual>
- </link>
-
-
- <joint name="left_tip_joint" type="fixed">
- <!-- 定义一个名为left_tip_joint的关节,类型为固定 -->
- <parent link="left_gripper"/>
- <!-- 定义父链接为left_gripper -->
- <child link="left_tip"/>
- <!-- 定义子链接为left_tip -->
- </joint>
-
-
- <link name="left_tip">
- <!-- 定义一个名为left_tip的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(0.09137, 0.00495, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
- <!-- 使用外部网格文件定义几何形状,文件路径为package://urdf_tutorial/meshes/l_finger_tip.dae -->
- </geometry>
- </visual>
- </link>
-
-
- <joint name="right_gripper_joint" type="fixed">
- <!-- 定义一个名为right_gripper_joint的关节,类型为固定 -->
- <origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
- <!-- 定义关节的原点,绕x轴旋转0度,绕y轴旋转0度,绕z轴旋转0度,位置为(0.2, -0.01, 0) -->
- <parent link="gripper_pole"/>
- <!-- 定义父链接为gripper_pole -->
- <child link="right_gripper"/>
- <!-- 定义子链接为right_gripper -->
- </joint>
-
-
- <link name="right_gripper">
- <!-- 定义一个名为right_gripper的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="-3.1415 0 0" xyz="0 0 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转-3.1415弧度,绕y轴旋转0度,绕z轴旋转0度,位置为(0, 0, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
- <!-- 使用外部网格文件定义几何形状,文件路径为package://urdf_tutorial/meshes/l_finger.dae -->
- </geometry>
- </visual>
- </link>
-
-
- <joint name="right_tip_joint" type="fixed">
- <!-- 定义一个名为right_tip_joint的关节,类型为固定 -->
- <parent link="right_gripper"/>
- <!-- 定义父链接为right_gripper -->
- <child link="right_tip"/>
- <!-- 定义子链接为right_tip -->
- </joint>
-
-
- <link name="right_tip">
- <!-- 定义一个名为right_tip的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
- <!-- 定义视觉元素的原点,绕x轴旋转-3.1415弧度,绕y轴旋转0度,绕z轴旋转0度,位置为(0.09137, 0.00495, 0) -->
- <geometry>
- <!-- 定义几何形状 -->
- <mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
- <!-- 使用外部网格文件定义几何形状,文件路径为package://urdf_tutorial/meshes/l_finger_tip.dae -->
- </geometry>
- </visual>
- </link>
-
-
- <link name="head">
- <!-- 定义一个名为head的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <sphere radius="0.2"/>
- <!-- 定义一个球体,半径为0.2 -->
- </geometry>
- <material name="white"/>
- <!-- 使用名为white的材质 -->
- </visual>
- </link>
- <joint name="head_swivel" type="fixed">
- <!-- 定义一个名为head_swivel的关节,类型为固定 -->
- <parent link="base_link"/>
- <!-- 定义父链接为base_link -->
- <child link="head"/>
- <!-- 定义子链接为head -->
- <origin xyz="0 0 0.3"/>
- <!-- 定义关节的原点,位置为(0, 0, 0.3) -->
- </joint>
-
-
- <link name="box">
- <!-- 定义一个名为box的链接 -->
- <visual>
- <!-- 定义视觉元素 -->
- <geometry>
- <!-- 定义几何形状 -->
- <box size="0.08 0.08 0.08"/>
- <!-- 定义一个长方体,尺寸为0.08x0.08x0.08 -->
- </geometry>
- <material name="blue"/>
- <!-- 使用名为blue的材质 -->
- </visual>
- </link>
-
-
- <joint name="tobox" type="fixed">
- <!-- 定义一个名为tobox的关节,类型为固定 -->
- <parent link="head"/>
- <!-- 定义父链接为head -->
- <child link="box"/>
- <!-- 定义子链接为box -->
- <origin xyz="0.1814 0 0.1414"/>
- <!-- 定义关节的原点,位置为(0.1814, 0, 0.1414) -->
- </joint>
- </robot>
- <!-- 结束机器人定义 -->
ros2 launch urdf_tutorial display.launch.py model:=urdf/05-visual.urdf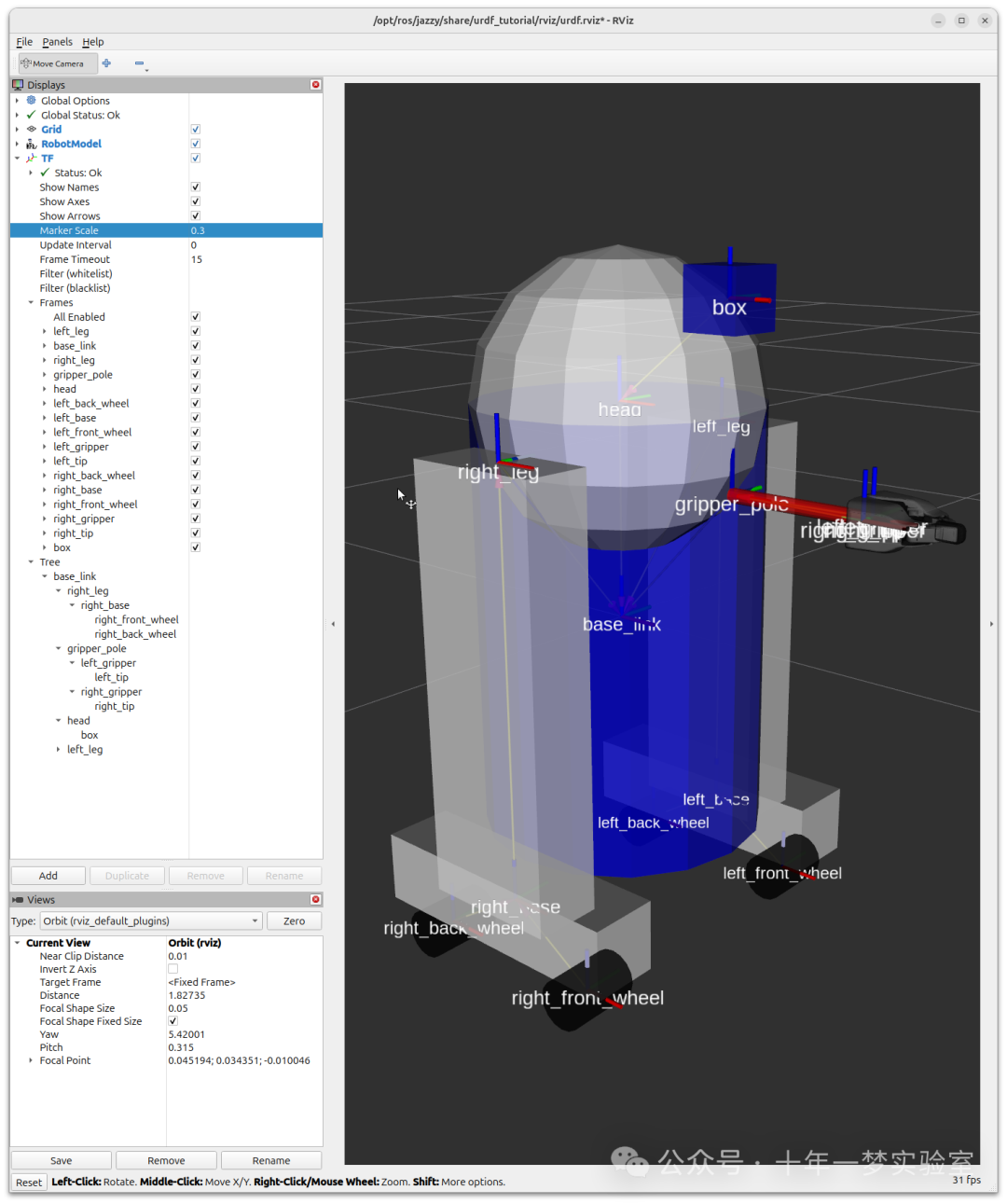
如何添加球体应该是相当不言自明的
- <link name="head">
- <visual>
- <geometry>
- <sphere radius="0.2"/>
- </geometry>
- <material name="white"/>
- </visual>
- </link>
这里的网格是从 PR2 借来的。它们是单独的文件,你必须指定路径。你应该使用 package://NAME_OF_PACKAGE/path 符号。本教程的网格位于 urdf_tutorial 包中的一个名为 meshes 的文件夹中。
- <link name="left_gripper">
- <visual>
- <origin rpy="0.0 0 0" xyz="0 0 0"/>
- <geometry>
- <mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
- </geometry>
- </visual>
- </link>
这些网格可以以多种不同的格式导入。STL 是相当常见的,但引擎也支持 DAE,它可以有自己的颜色数据,这意味着你不必指定颜色/材料。通常这些在单独的文件中。这些网格引用了网格文件夹中的
.tif文件。网格也可以使用相对缩放参数或边界框大小进行调整。
我们也可以引用一个完全不同包中的网格。
就是这样。一个类似 R2D2 的 URDF 模型。现在你可以继续下一步,让它动起来。https://docs.ros.org/en/jazzy/Tutorials/Intermediate/URDF/Building-a-Movable-Robot-Model-with-URDF.html

