
- 1自然语言处理库——Gensim之Word2vec_gensim中的word2vec
- 2面试阿里JavaP7岗本以为凉凉:4轮技术面终拿下offer,终圆我大厂梦
- 3毕业设计 基于Spark网易云音乐数据分析_网易云音乐评论数据分析
- 4C# Web控件与数据感应之 TreeView 类 续篇
- 5流式大数据处理的三种框架:Storm,Spark和Flink_开源分布式存储和处理框架,例如spark和storm
- 6【Java】 Java中解码Base64数据的简易指南_java base64 解码
- 7基于NLU的智能对话系统_nlu协议
- 8大模型入门教程(非常详细)从零基础入门到精通,看完这一篇就够了_大模型推理详细流程
- 9电脑键盘上每个键的作用_Mac键盘不起作用?苹果电脑键盘失灵解决教程
- 10【人工智能】AI 人工智能技术近十年演变发展历程_在过去10年中,ai技术
论文笔记-人工智能时代的遥感变化检测技术:继承、发展与挑战_变化检测经典论文
赞
踩
0 摘要
本文在总结多时相遥感数据源从同构到异构、变化检测模型从传统到智能、变化检测应用从理论到落地过程中存在问题的基础上,以光学遥感影像变化检测任务为例,梳理和分析了人工智能时代下变化检测技术的发展历程。从无监督、监督、弱监督3个方面探讨了遥感变化检测从传统到前沿技术的转型特点与趋势,并进一步提出了未来需重点突破模型的物理可解释性、泛化及迁移能力、跨数据—跨场景—跨领域应用水平等关键问题。
1 引言
变化检测技术根据应用目的可分为:异常变化检测、二类变化检测、多类变化检测和时序变化检测。其中,异常和二类变化检测主要关注变化区域的主动探测问题,多类变化检测在实现变化区域探测的同时进行变化类型的细分,而时序变化检测则主要关注变化时间定位及变化趋势。根据变化检测与样本的结合程度,又可进一步分为无监督、监督和弱监督变化检测3种类型。
由于全球气候变化效应显现和人类活动的频繁,使得遥感变化检测的需求愈加迫切,单纯依赖光谱变化的传统方法受到了极大的挑战,难以有效直接迁移与应用,进而导致实际算法性能的降低和较高漏检、错检误差的产生。而机器学习方法的直接引入与应用,易造成唯方法论的短板,导致检测精度提升快但解释性差、与实际地物变化的遥感机理关联性弱、模型泛化和迁移能力差等问题。
针对具体应用场景和任务需求,在充分考虑光谱变化的同时,引入更多的对象—语义—地学知识支撑,设计出具有强解释性、高鲁棒性、高自动化和高精度的变化检测技术,以有效地发现、识别和描述地表真实变化信息,是目前遥感领域重点关注的热门研究方向之一。
2 发展阶段与演变趋势
遥感变化检测历经了从传统算法到智能化算法的跨越式发展,可归纳为3个阶段:数据驱动的变化检测阶段、模型驱动的变化检测阶段和数据—模型—知识共同驱动的变化检测阶段。
2.1 数据驱动的变化检测阶段
采用传统的影像处理与分析技术,如波段代数计算、特征变换、指数提取、分类等进行变化提取。典型的算法主要依赖于前后时相遥感影像光谱反射率及其衍生指数 (如归一化植被指数等) 的比较,包括波段差值法、比值法、回归分析法、变化矢量分析 (CVA)、主成分变换 (PCA)、独立主成分变换(ICA)、分类后比较法等。
1)主要面向中、低分辨率遥感影像,基于独立像素假设,变化检测过程中较少考虑像素间的空间相关性;
2)多为数据驱动,该阶段的数据通常是指“小数据”或者是特定类型数据;
3)未完全使用先验信息,判读解译依赖于专家知识和人工经验,算法整体性能高度依赖于多时相数据的质量,受分类精度和变化阈值设定影响显著,易出现漏检和错检误差累积的现象。
2.2 模型驱动的变化检测阶段
该阶段吸收和利用了机器学习、模式识别领域涌现出的优秀算法并应用于遥感变化检测,主流算法包括结合了人工神经网络 (ANN)、条件随机场 (MRF)、决策树 (DT)、随机森林 (RF)、支持向量机 (SVM)和极限学习机 (ELM) 等。在机器学习的有力促进下,通过学习样本和先验知识去促进建模,再由模型去反向解释数据,从而构建出具有弱人工智能特点的变化检测方法。
1)具备了自动学习变化模式的能力;
2)可以选择和利用已有的先验知识与样本信息训练模型;
3)开始关注和利用邻域像素及其空间关系信息;
4)具备对于隐含特征、潜在知识的表示和推理;
5)多种监督策略及组合集成学习。
虽然对比前一阶段,该阶段方法在智能化和自动化程度上有了较大提升,但仍存在对于有效样本的学习不充分、变化特征的提取组合方式单一、信息冗余及模型的泛化和迁移能力较差等问题。
2.3 数据—模型—知识驱动的变化检测阶段
随着先进机器学习的不断发展,尤其是深度学习的兴起,极大地引领了遥感变化检测的前沿研究。该阶段从数据—模型—知识角度联合驱动变化检测方法的构建,在变化特征的有效学习、变化模型的稳健构建、大数据模式的分析和传统方法的深度化等方面进行了诸多尝试。如基于深度变化矢量分析方法 (DCVA)、深度分类网络构建方法、生成对抗网络 (GAN) 和迁移学习的弱监督方法等。
1)基于先进机器学习算法如集成学习、强化学习、迁移学习、深度学习等强大的计算与学习能力;
2)由数据、模型和知识 3 者共同驱动;
3) 协同采用多种监督策略。
虽然在检测性能和精度上有了较大的提升,但仍存在如模型过度依赖于样本的数量和质量,基于深度学习变化检测模型的普适性和物理可解释性相对偏低,模型的迁移性和效率不尽人意等难题。
3 传统继承与转型发展
3.1 无监督变化检测
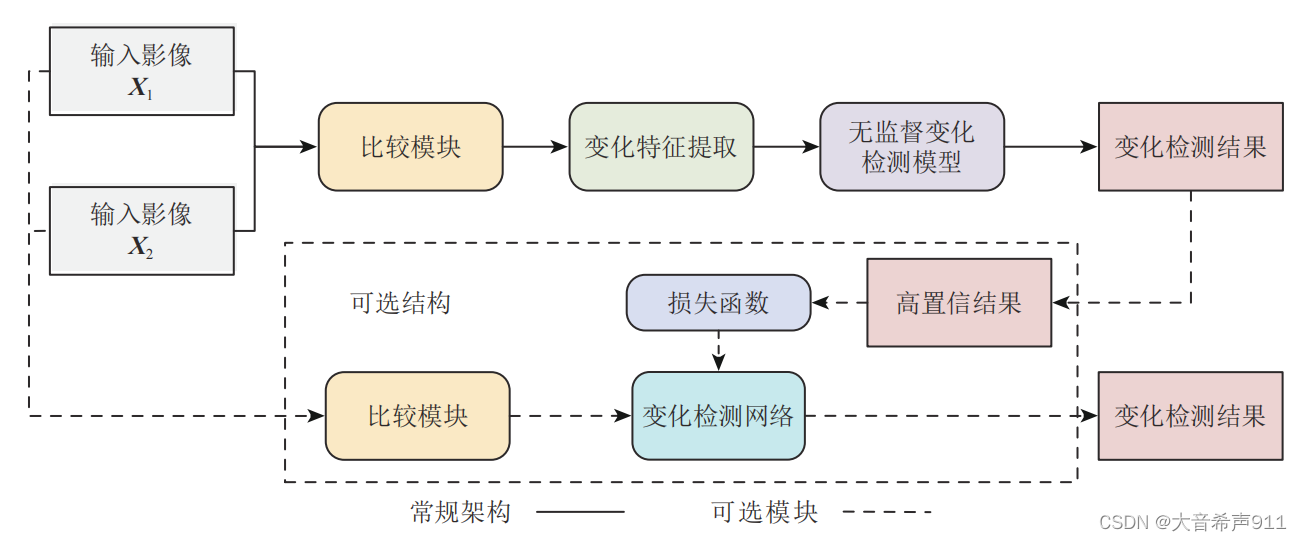
主要包含两个关键步骤。第一,多时相影像比较,构建差异影像,以突出变化信息;第二,建立变化检测模型,分析差异特征并从中提取变化区域。主要基于距离或密度等无监督聚类算法对差异影像进行分类,如利用 K 均值聚类、层次光谱聚类等。
传统无监督方法主要建立在中低分辨率遥感影像之上,一般仅针对特定的应用场景,模型精度受限于实际数据的质量和场景复杂性,同时对使用者的经验和技巧有较高要求。
主要有两个发展方向,第一,随着遥感影像分辨率的提升,延续并突破传统无监督变化检测方法在面向高空间分辨率和高光谱分辨率数据的局限性是其转型过程中一个重要的发展方向。如基于经典压缩变化矢量分析方法 (CVA) 所构建的多尺度形态学和超像素重构方法、空—谱波段衍生方法等,对原始谱段信息进行特征衍生和特征重构,以增强高空间分辨率影像中的变化目标表达,提升无监督高空间分辨率遥感数据变化检测的有效性。
第二,无监督变化检测的另一重要前沿发展趋势是对传统方法的深度化,其核心是将人工变化特征提取转换为利用深度学习实现的深度特征提取。传统方法中的人工特征提取多依赖于先验知识,且通常仅能提取浅层变化特征。而深度无监督变化检测方法能提取潜在的多层变化特征,利用预检测出的部分高置信度结果来计算损失函数,从而训练出高效的变化检测网络。如深度变化矢量分析 (DCVA)方法和深度慢特征分析 (DSFA) 方法,均是基于传统方法的特征深度化模型(2019年提出)。如 基 于 图 卷 积 网 络 和 度 量 学 习 的 变 化 检 测(GMCD),采用孪生全卷积网络、多尺度动态图卷积网络和基于度量学习的伪标签生成机制,以无监督方式完成模型的训练(2022年提出)。
3.2 监督变化检测

早期的监督变化检测技术主要关注的是多时相遥感影像的像素级分类及检测。发展中期开始利用像素邻域及上下文信息进行空—谱联合分类,同时也关注面向对象的变化检测方法。最新发展则是利用深度特征提取进一步优化空间邻域信息的表达,并开始关注场景级的变化检测。
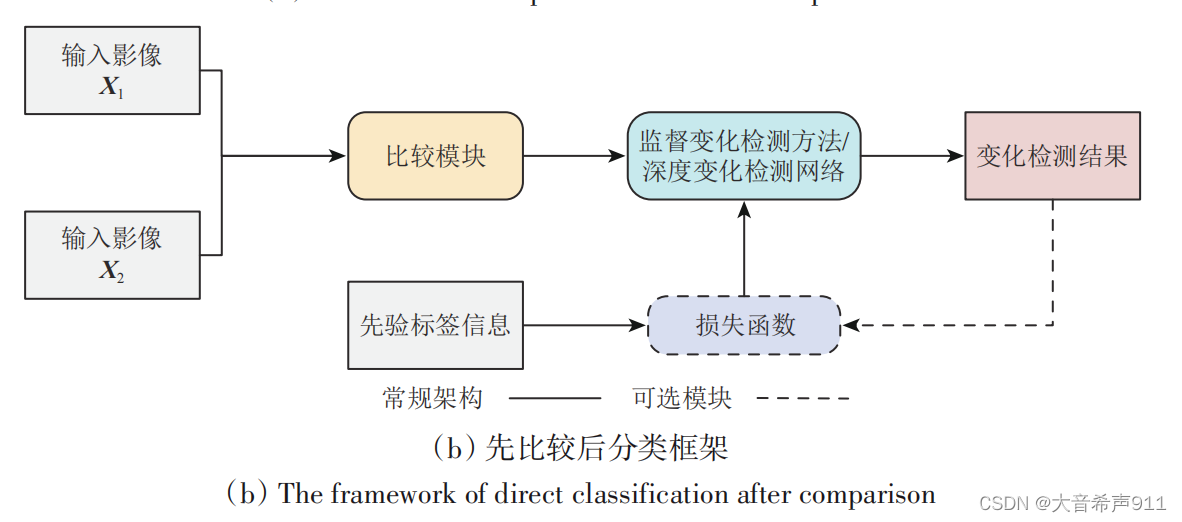
本质上可看作为监督分类问题,可分为两大类方法:先分类后检测 (或分类后比较)方法和先比较后分类方法。通常包含语义标签数据输入、分类器选择和变化提取 3 个主要步骤。
随着机器学习对于影像特征提取能力的不断提高,提取除光谱信息外的多维变化特征并融合分类,从而实现变化目标的建模与识别,是监督变化检测技术发展中的一个重要方向。使用影像不同特征 (如光谱、空间、纹理、指数因子),构建加权距离相似度和模糊集融合模型等进行监督变化检测(2012年提出)。分别提取邻域—对象—场景级的特征以捕获不同层次的变化空间信息,经特征降维融合后利用分类器进行变化检测(2020年提出)。常用的分类器如 SVM、ELM、最邻近分类器 (KNN) 等。在单分类器结果的基础上,充分利用机器学习中的集成学习等先进理论方法,可实现有效的特征互补和决策融合,从而进一步提升变化检测的精度,降低漏检和虚检误差,如使用旋转森林 (RoF)、证据理论(D-S)、模糊积分等。
在深度学习的影响下,传统监督变化检测方法也开始逐渐走向深度化。
对于先分类后检测方法来说,深度学习网络可对单时相影像提取多层、多尺度的深度特征并用于分类,再比较分类结果从而定位检测出变化。如基于注意力度量的深度网络 (DSAMNet),使用多个 ResNet 模块提取多尺度深度特征并集成注意力模块来增强特征提取的性能(2022年提出)。基于双时相语义推理网络 (Bi-SRNet) 变化检测模型,利用 CNN 的跨时相语义推理注意力模块,增强了两时相预测图的语义一致性(2022年提出)。
对于先比较后分类方法来说,首先对输入的双时相遥感影像生成初始变化差异特征,再利用深度检测网络实现深度变化特征的提取与检测。如基于光谱—空间注意机制的孪生神经网络(SSA-SiamNet)和基于语义分段编码器—解码器体系结构的变化检测方法等(2022年和2019年提出)。
3.3 弱监督变化检测
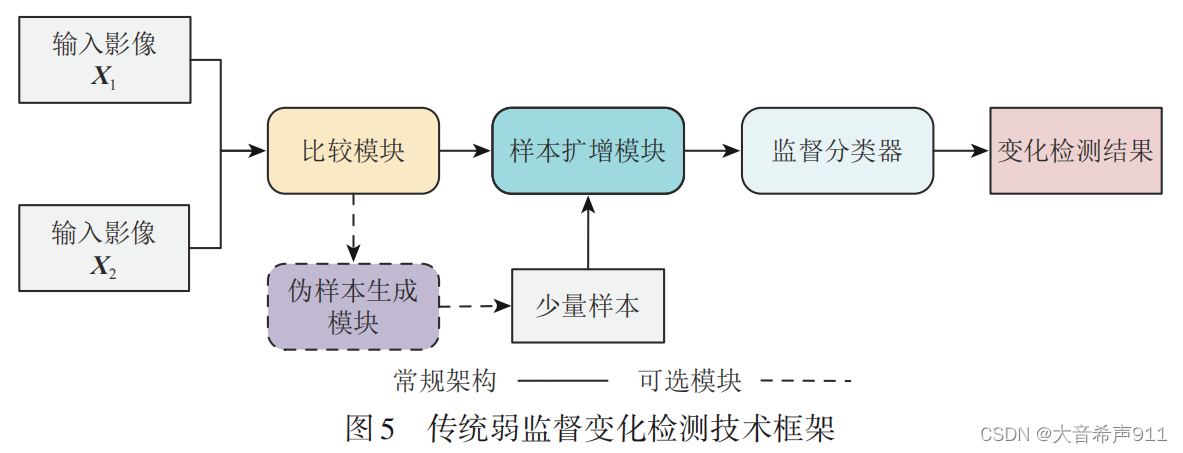
其核心在于引入未标记信息,并且结合使用有限的可靠先验信息,两者共同参与获得变化检测结果。为了克服先验标签信息不足。在机器学习和深度学习尚未被完全引入变化检测之前,传统的弱监督变化检测方法实质上仍是监督型变化检测,但关注点在于样本的生成、筛选、过滤以及标签强化等。
受到机器学习特别是深度学习的影响,传统模型在走向深度化的过程中演变出了两种典型架构。
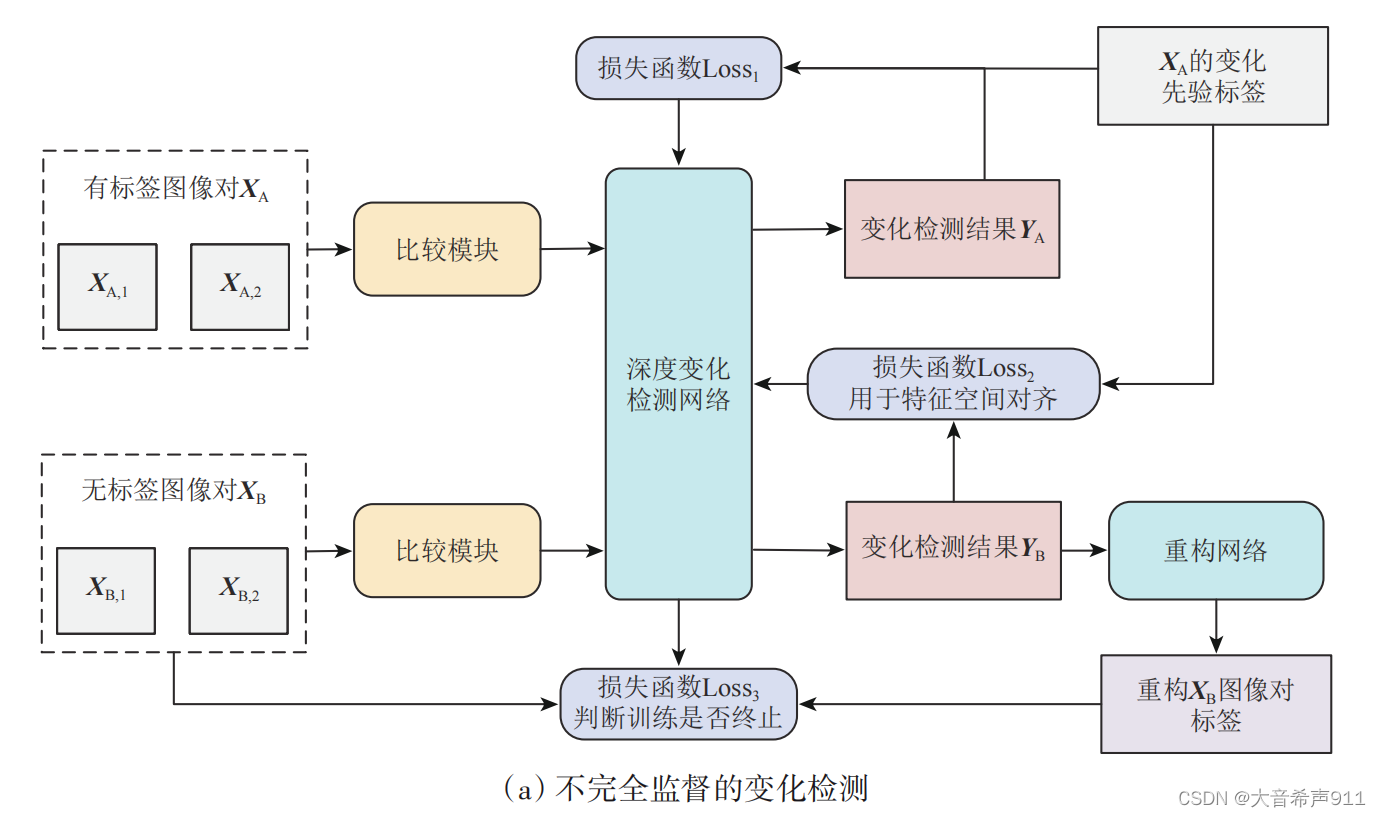
一种是基于不完全监督的深度变化检测架构,其关键步骤包括:深度变化检测网络、特征空间对齐和重构网络的构建。有标签和无标签的训练数据分两路交替训练,经过变化检测网络后不同标签类型获得的结果精度评价标准不一致,所以需要额外使用一个损失函数协助特征空间对齐。重构网络和决定训练是否终止
的损失函数的定义与构建,也是影响最终检测精度的关键之一。该架构如结合强化学习、迁移学习和生成式对抗网络等。
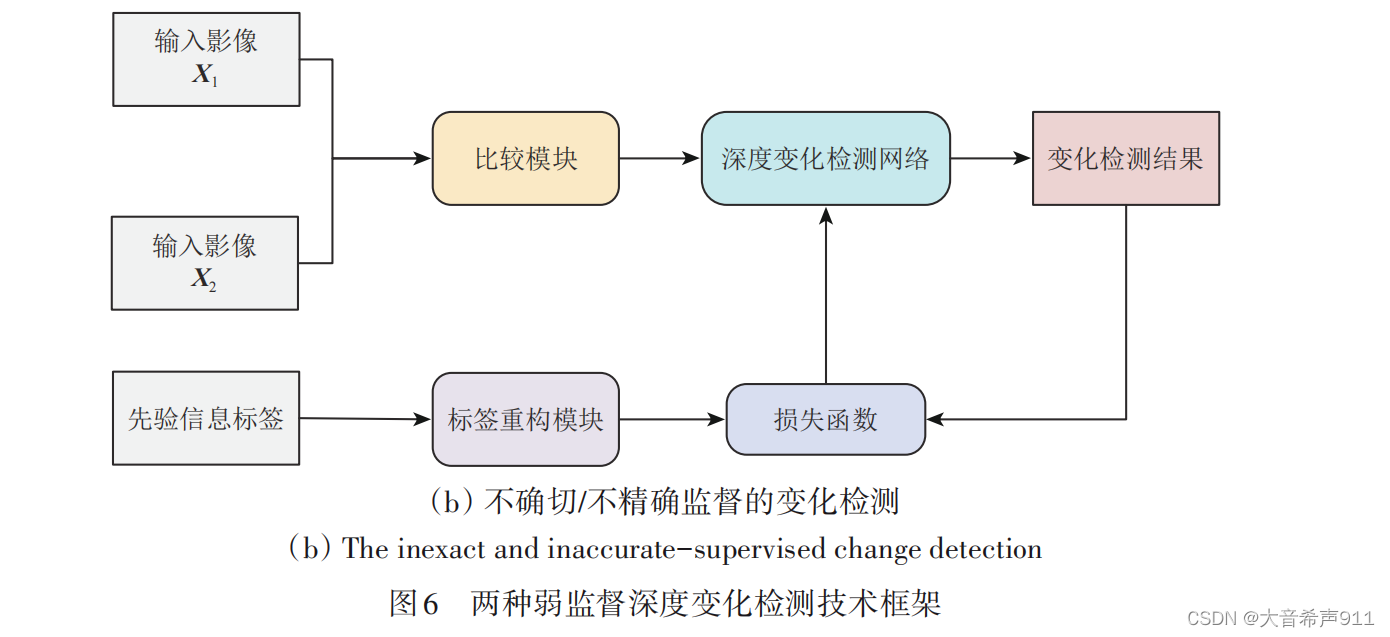
另一种是基于不精确和不确切监督的深度变化检测方法,包含了初步变化提取比较模块、深度变化检测网络以及标签重构模块。其中关键步骤在于深度变化检测网络的构建以及标签重构。其中标签重构产生的误差会传递给变化检测模块并最终影响检测精度。现有方法主要研究标签数据的利用和未标记数据的信息挖掘。如基于迁移深度学习的变化检测方法,在预训练阶段对带标签数据的变化检测和未标记目标数据的重构,实现了两类数据的特征分布对齐(2019年提出)。基于生成对抗网络的弱监督卷积变化检测网络,首先将标记数据和未标记数据输入分割网络生成初始预测结果并计算熵图,然后采用两个鉴别器来增强标记数据和未标记数据之间的特征分布一致性,挖掘出未标记数据信息(2021年提出)。
4 挑战与展望
第一,在数据层面,对于多源异构大数据的集成与处理的挑战。包括异构数据集成、高精度预处理、多维变化提取融合。
第二,在模型层面,对于智能化变化检测模型的挑战。未来的变化检测方法构建需考虑“数据—模型—知识”3 者耦合驱动下的新模型。
第三,在应用层面,对于高可信变化检测应用。构建面向多源多模态数据的算法模型,提升模型在跨区域、跨要素、跨数据集上的泛化能力与应用水平;打破常规双时相、多时相固定输入及在小数据、小场景上的限制,实现时相域上近实时和长时序、空间域上大范围、大场景的变化检测应用;打通“要素—对象—场景—功能”的变化检测应用,实现复杂场景下“变化检测”到“变化解释”的跨越;将传统意义上的本地单机化检测处理迁移至云计算平台(如 Google Earth Engine 等),以有效降低数据存储和计算成本,促使低成本、大尺度、长时序、高性能的“云”变化检测应用成为可能。


