
- 1张丽俊最新演讲:要像竹子一样扎根,你终会一飞冲天_王义超是哪里人
- 2Python算法题集_找到字符串中所有字母异位词
- 3git clone No space left on device_git clone no space left on device
- 4芯片测试问题的一些理解
- 5ACM Proceedings Template 使用方法_acm template
- 6完整卸载SQL Server2008_卸载sqlserver2008
- 7微信小程序开发中的二维码扫描和生成功能_微信开发者工具测试扫码怎么弄
- 8都说靠python接单一个月能赚好几千,事实真是如此吗?_python网上接单可以赚钱吗
- 9Python进程池multiprocessing.Pool_multiprocessing.pool()
- 10.NET/C# ⾯试题汇总系列:ASP.NET Core 003
《C.Net上位机通过TCP通讯实时获取KUKA机器人位置控制源码及资源包(附8.3版KUKA系统软件手册和KUKA.Ethernet KRL 2.2手册)》,C.Net上位机TCP通讯实现KUKA机_kuka8.3系统用那个版本的ethernetkel
赞
踩
C.Net上位机TCP通讯与KUKA机器人实时位置返回运动控制源码
产品介绍:
1.本项目中的KUKA系统软件为8.3版本,PC端程序基于 .NET Framework 4.0;
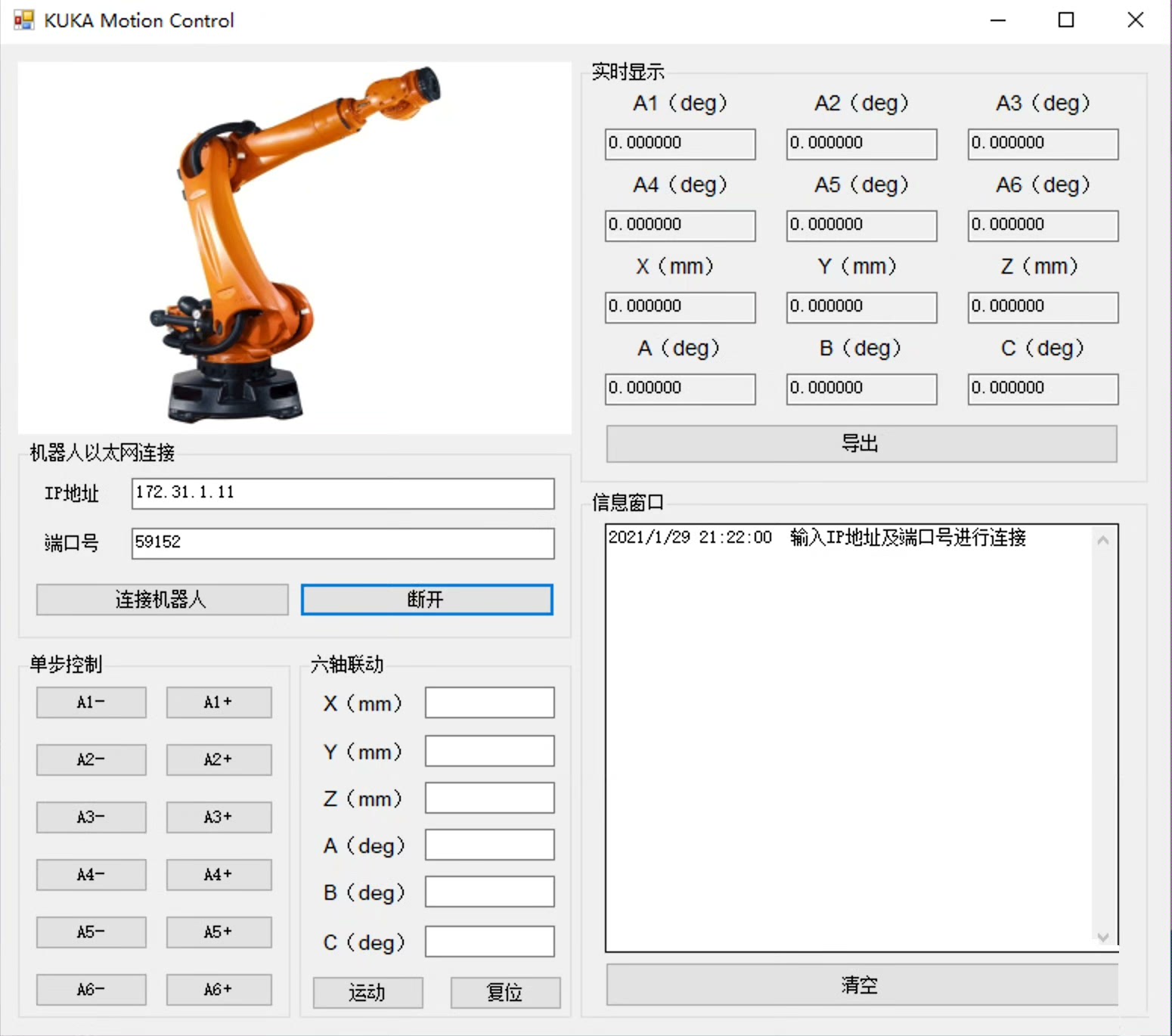
2.C#上位机通过TCP通讯与库卡机器人连接,可实时返回机器人各关节位置,返回位置可导出为.CSV文件;
3.通过上位机控制机器人,实现各关节单步运动及当前位置到给定坐标的点运动两种形式;
4.资源包括【KUKA端】、【PC端】及【附件】三部分。
5.KUKA端包括config.dat、sps.sub 、motion16.src、motion16.dat、Xml_motion16.xml 五个必要文件;
6.PC端包括C#上位机程序;
7.附件包括《KUKA系统软件8.3》手册、《KUKA.Ethernet KRL 2.2》手册
ID:8650727476128918
自由苏风
C.Net上位机TCP通讯与KUKA机器人实时位置返回运动控制源码
在工业自动化领域中,机器人的运动控制一直是一个重要的研究方向。KUKA机器人是目前应用广泛的一种工业机器人,它具有高效、精确的运动控制能力。本项目介绍了一种基于C.Net上位机和TCP通讯的方法,用于实时获取KUKA机器人的位置信息,并实现对机器人的运动控制。
-
产品概述
本项目中的KUKA系统软件使用的是8.3版本,PC端程序基于.NET Framework 4.0。通过在C#上位机上建立TCP通讯与KUKA机器人进行连接,可以实时返回机器人的各关节位置,返回位置还可以导出为.CSV文件。此外,通过上位机控制机器人,可以实现关节的单步运动以及将当前位置移动到给定坐标点的运动。 -
系统架构
本系统由KUKA端、PC端和附件三部分组成。KUKA端包括一些必要的文件,如config.dat、sps.sub、motion16.src、motion16.dat和Xml_motion16.xml。PC端包括了用C#编写的上位机程序。附件则包括了《KUKA系统软件8.3》手册和《KUKA.Ethernet KRL 2.2》手册。 -
TCP通讯
在本项目中,C#上位机通过TCP通讯与KUKA机器人进行连接。TCP是一种可靠的面向连接的协议,它可以确保数据的可靠传输。通过TCP通讯,上位机可以与机器人实现双向的数据传输,包括控制命令的发送和位置信息的返回。 -
实时位置返回
通过TCP通讯,上位机可以实时获取KUKA机器人的各关节位置。上位机向机器人发送请求后,机器人返回当前位置的数据。这些位置数据可以用于后续的运动控制和分析。 -
位置数据导出
本系统还提供了将位置数据导出为.CSV文件的功能。用户可以将机器人的位置数据保存为.CSV文件,并在后续的分析和处理中使用。 -
运动控制
上位机可以通过TCP通讯对机器人进行运动控制。具体来说,上位机可以实现关节的单步运动和将当前位置移动到给定坐标点的运动。通过这种方式,用户可以实现对机器人的灵活控制和精确定位。 -
应用案例
本系统的
【相关代码,程序地址】:http://fansik.cn/727476128918.html

