
- 1GitHub标星即将突破100K!辛辛苦苦才给你整理了188道Java面试题,如此干货,不来白嫖血亏_一万个人抢100个红包,如何实现(不用队列),如何保证2个人不能抢到同一个红包
- 2最新Java必备技能之环境搭建篇 (linux ab压力测试Nginx)(实战)(3),2024年最新面试软件测试工程师会问到那些问题_nginx ab测试
- 3全面解析自然语言处理(NLP):基础、挑战及应用前景_nlp自然语言处理
- 4C语言练习,利用求阶乘函数Fact(),编程计算并输出从1到n之间所有数的阶乘值。_利用求阶乘函数fact(),编程计算并输出从1到n之间所有数的阶乘值。 **输入格式要求
- 5【眼疾病识别】图像识别+深度学习技术+人工智能+卷积神经网络算法+计算机课设+Python+TensorFlow
- 6avr单片机led数码管六位动态显示时分秒c语言程序,AVR单片机8位数码管显示的程序实现(两种方法介绍)...
- 7原来的cpu程序,现在要用到GPU了,makefile咋改_makefile.gpu
- 8【运维知识高级篇】一篇文章带你搞懂代码质量检测SonarQube!_sonarqube质量阈错误
- 9vue3 选项式生命周期API 和 组合式生命周期API 执行先后顺序
- 10机器学习模型可解释性进行到底 —— SHAP值理论(一)_shap算法
yolov5_obb~模型到部署_yolov5-0bb
赞
踩
工业级旋转目标检测从数据制作到模型部署 ,挖来的大佬的哈~~ 感谢
yolov5_obb 是基于 yolov5 目标检测框架开发的一个项目,支持旋转目标检测任务(Oriented Bounding Boxes,OBB),旨在生成更好拟合具有角度位置的物体预测结果,广泛适用于机器人感知,遥感等领域。此前经过调研发现目前全网上关于此方面的资料相对较少,鱼龙混杂,不是比较老旧、乱七八糟,就是一言不合就付费查看,看个寂寞,实在是不忍直视。因此,本文旨在提供一个从数据集制作、划分、安装、训练、验证、部署保姆级教程,帮助大家从0到1快速完成项目的上手和开发,满足日常工作和学习的需求。
#数据集制作
工具介绍
X-AnyLabeling[1]不仅是一个标注工具,它还是自动数据标注未来的一大飞跃。它的设计不仅简化了标注过程,还集成了尖端的AI模型,融入了当前最先进的视觉大模型和多模态技术,以获得更出色的体验。X-AnyLabeling 专注于实际应用,力求提供一个工业级的、功能丰富的工具,可帮助开发人员自动标注和处理各种复杂任务的数据。
在最新的 v1.0.0 版本中,X-AnyLabeling 已经完美支持了旋转框的标注,同时提供全方位的角度显示,实操体验方面也与经典的 roLabelImg 基本保持一致,极大降低用户的学习成本,且支持直接导出 DOTA 格式的标签文件,无需转换一键训练。最后,工具中还提供了 yolov5_obb 预训练,并支持加载自定义模型,可极大提升数据标注效率,形成快速闭环。
喜欢的小伙伴欢迎点个
star,持续关注后续更丰富的功能更新。
工具安装
- git clone https://github.com/CVHub520/X-AnyLabeling
- cd X-AnyLabeling
- pip install -r requirements.txt
- # pip install -r requirements-gpu.txt
- python anylabeling/app.py
使用教程
-
在标注之前,准备一个预定义的类别标签文件(*.txt),格式如下:
- vehicle
- boat
每一行代表一个类别,根据自己的具体任务填写。
-
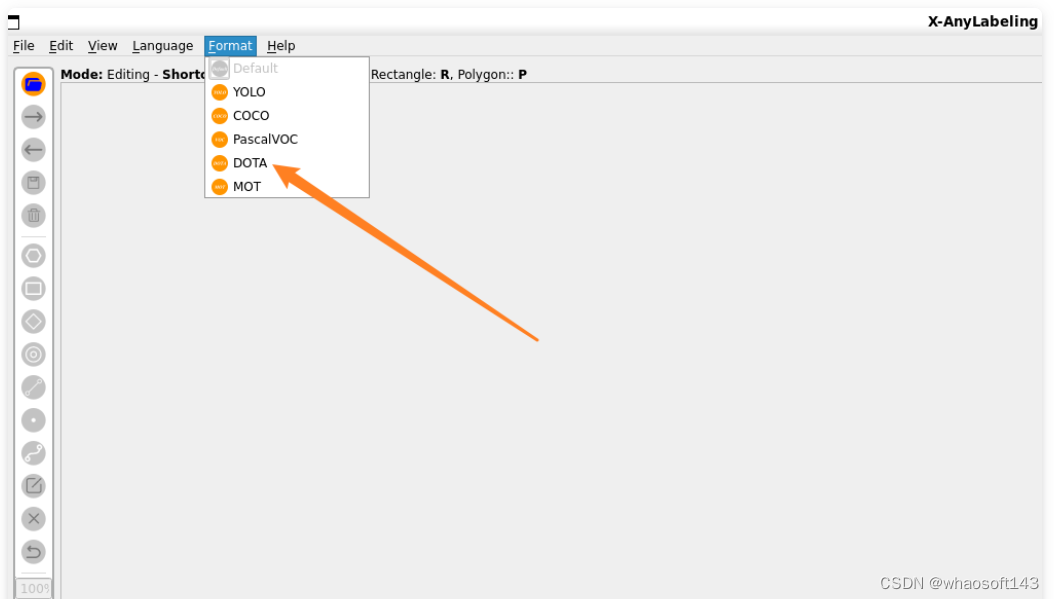
在顶部菜单栏中点击
Format选项,选择DOTA,并导入上一步准备好的标签文件。
基本用法
-
按下快捷键 "O" 来创建一个旋转形状。
-
打开编辑模式(快捷键:"Ctrl+J")并单击选择旋转框。
-
通过快捷键 "zxcv" 旋转所选框,其中:
-
z:大角度逆时针旋转
-
x:小角度逆时针旋转
-
c:小角度顺时针旋转
-
v:大角度顺时针旋转
-
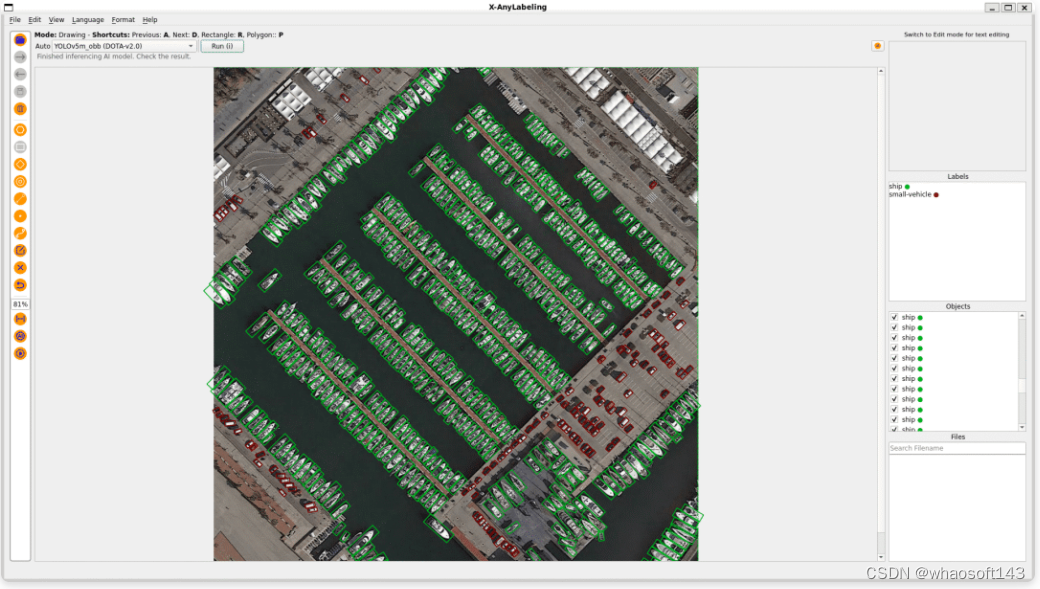
高级用法
此外,您可以使用训练好的模型批量预标记当前数据集。
-
按下快捷键 "Ctrl+A" 打开自动标注模式;
-
选择一个适当的模型或加载本地训练完毕的自定义模型。
-
按下快捷键 "Ctrl+M" 一次运行所有图像。
如果你手头上刚好有一批标注好的 DOTA 格式数据集,同样也可以使用标签转换脚本一键转换成 X-AnyLabeling 的自定义格式导入到工具中进一步查看和修改:
python tools/label_converter.py --task rotation --src_path dota_label_folder --img_path dota_image_folder --mode dota2custom
详细信息,请参考此文档[2]。
入门指南
准备工作
-
环境要求
-
Python 3.7+
-
PyTorch ≥ 1.7
-
CUDA 9.0或更高版本
-
Ubuntu 16.04/18.04
-
-
安装开始
a. 创建一个conda虚拟环境并激活它:
- conda create -n yolov5_obb python=3.8 -y
- source activate yolov5_obb
b. 确保您的CUDA运行时API版本≤CUDA驱动程序版本。(例如11.3 ≤ 11.4)
- nvcc -V
- nvidia-smi
c. 根据您的机器环境,根据官方说明安装PyTorch和torchvision,并确保cudatoolkit版本与CUDA运行时API版本相同,例如:
- pip install torch==1.12.0+cu116 torchvision==0.13.0+cu116 torchaudio==0.12.0 --extra-index-url https://download.pytorch.org/whl/cu116
- nvcc -V
- python
- >>> import torch
- >>> torch.version.cuda
- >>> exit()
d. 克隆最新版本的YOLOv5_OBB存储库。
- git clone https://github.com/CVHub520/yolov5_obb.git
- cd yolov5_obb
e. 安装yolov5-obb。
- pip install -r requirements.txt
- cd utils/nms_rotated
- python setup.py develop # 或者 "pip install -v -e ."
注意:
-
对于Windows用户,请参考此问题[3],如果在你在生成 utils/nms_rotated_ext.cpython-XX-XX-XX-XX.so方面遇到困难。
-
需要注意的是,笔者这里对 `poly_nms_cuda` CUDA实现重构了一遍,如果你使用的是 hukaixuan19970627 实现的版本,大概率会因版本问题编译不通过,可参考着修改下,但建议直接使用此修改后的版本,避免冲突。
-
DOTA_devkit [可选]
如果您需要切分高分辨率图像并进行评估,建议使用以下工具:
- cd yolov5_obb/DOTA_devkit
- sudo apt-get install swig
- swig -c++ -python polyiou.i
- python setup.py build_ext --inplace
数据集划分
准备自定义数据集文件
注意:确保标签格式为[polygon classname difficulty],例如,您可以默认将所有difficulty参数重置0,除非另有用途。
- x1 y1 x2 y2 x3 y3 x4 y4 classname diffcult
-
- 1686.0 1517.0 1695.0 1511.0 1711.0 1535.0 1700.0 1541.0 large-vehicle 0
然后,如果不需要对高分辨率图像进行切分处理的话,可直接修改路径参数并运行当前工程目录下的对应[脚本] (./divide.py)。注意修改下文件里面对应的路径参数等。
否则,您可以按以下步骤操作。
- cd yolov5_obb
- python DOTA_devkit/ImgSplit_multi_process.py
确保您的数据集组织在如下所示的目录结构中:
- .
- └── dataset_demo
- ├── images
- │ └── P0032.png
- └── labelTxt
-
-
- └── P0032.txt
最后,您可以创建一个自定义的数据yaml文件,参照[yolov5obb_demo.yaml] (./data/yolov5obb_demo.yaml),同yolov5类似。 whaosoft aiot http://143ai.com
注意:
-
对于像DOTA这种超大分辨率的图像数据集,建议在训练/测试之前进行切分处理,以获得更好的性能。
-
对于单类问题,建议添加一个"None"类,实际上将其变为一个2类任务,例如DroneVehicle_poly.yaml配置文件中所示,有利于训练更加稳定。
训练/验证/检测
在正式开始训练任务之前,请遵循以下建议:
确保将输入分辨率设置为32的倍数。
默认情况下,将批处理大小设置为8。如果将其增加到16或更大,请调整框丢失的缩放因子,以帮助收敛
theta。
-
要在多个GPU上使用分布式数据并行(DDP)模式进行训练,请参考此shell[脚本] (./sh/ddp_train.sh)。
-
如果要训练原始数据集而不需要切分数据集,可请参考以下命令快速开始
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/爱喝兽奶帝天荒/article/detail/850477
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

