
- 1统信UOS_麒麟KYLINOS上不覆盖高版本依赖包的情况下批量安装软件_kwre 统信(1)_同时安装多个kylin和uos
- 2jupyter下载tensorflow
- 3论文笔记--Llama3 report_llama3 论文
- 4Java语言程序设计考试题大全(含答案)_java题库及答案
- 5机器学习——聚类算法K-means_kmeans聚类 类别分不开
- 6使用Navicat生成ER关系图并导出_navicat生成数据库er图
- 7Apache2上部署SSL证书 提升安全等级_apache如何添加strict-transport-security
- 8软考-安全管理
- 9springboot集成 redis_springboot 集成redis 端口
- 10mysql 调用脚本_分享一个MySQL主从监控脚本—优化为钉钉告警
《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统
赞
踩
视频讲解
- 【第1季】8.第8章_激光SLAM系统-视频讲解
- 【第1季】8.1.第8章_激光SLAM系统_Gmapping算法-视频讲解
- 【第1季】8.2.第8章_激光SLAM系统_Cartographer算法-视频讲解
- 【第1季】8.3.第8章_激光SLAM系统_LOAM算法-视频讲解
第1季:第8章_激光SLAM系统
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
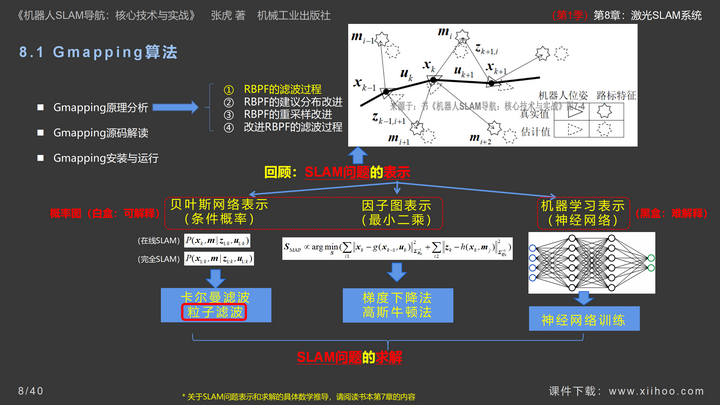
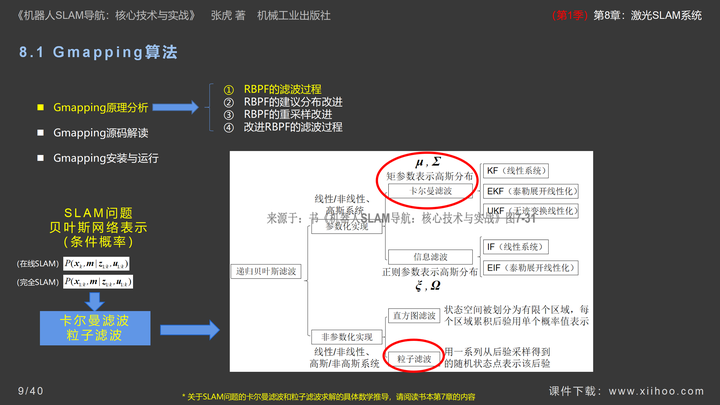
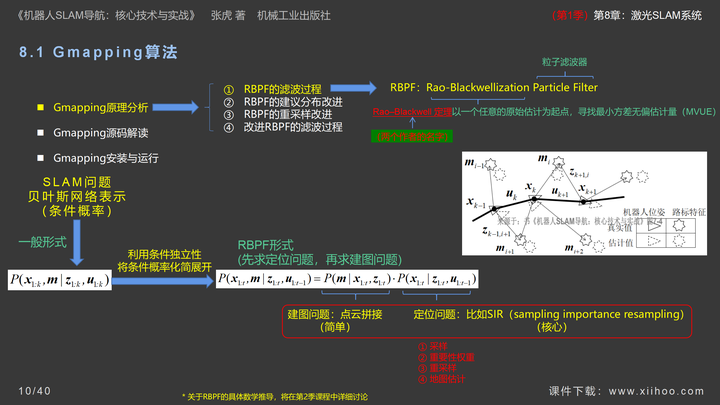
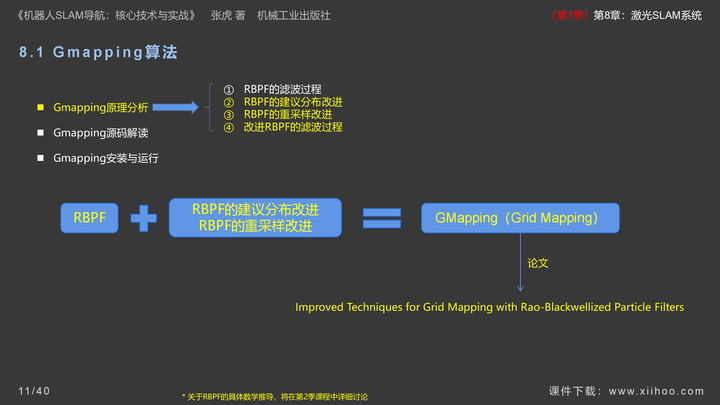
8.1 Gmapping算法
①Gmapping原理分析
RBPF的滤波过程、RBPF的建议分布改进、RBPF的重采样改进、改进RBPF的滤波过程
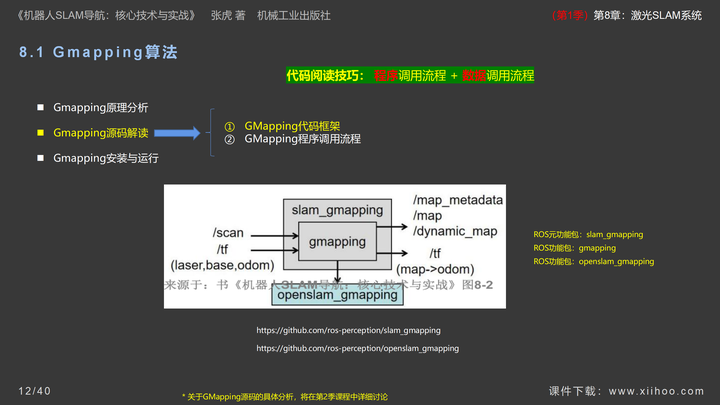
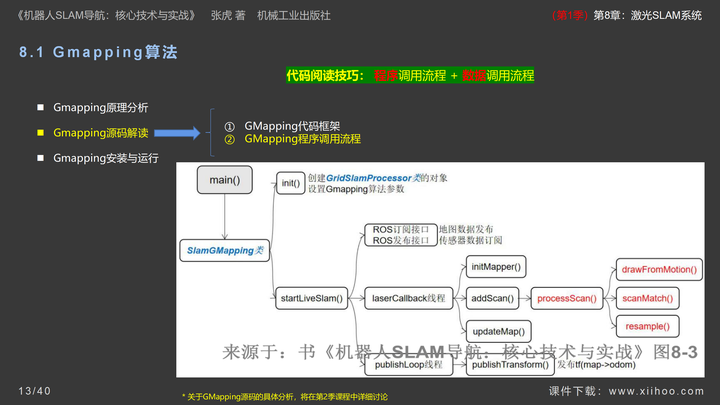
②Gmapping源码解读
GMapping代码框架、GMapping程序调用流程
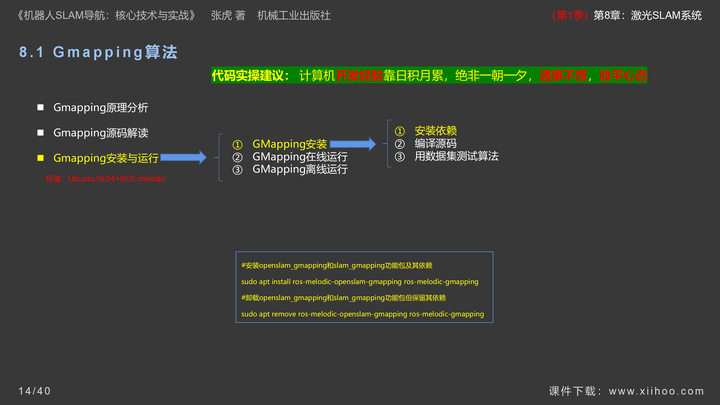
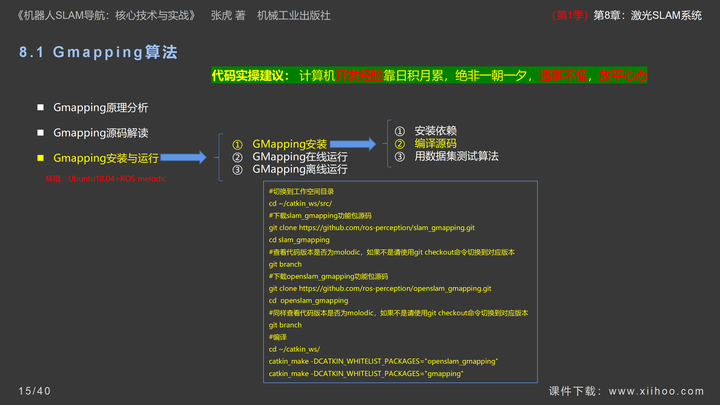
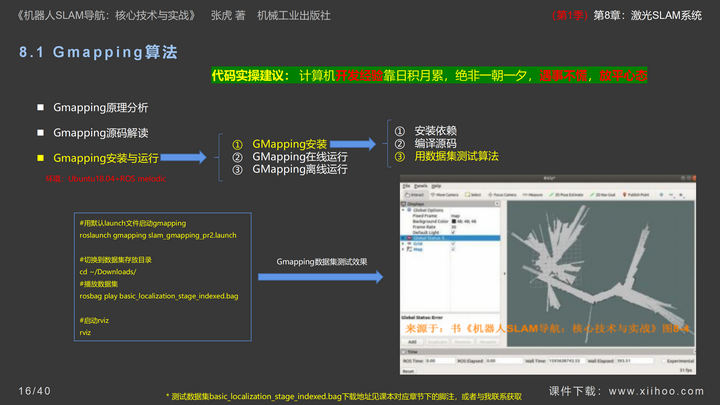
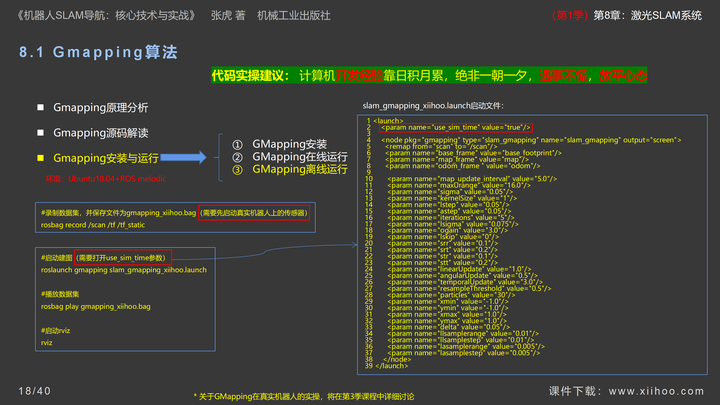
③Gmapping安装与运行
GMapping安装、GMapping在线运行、GMapping离线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
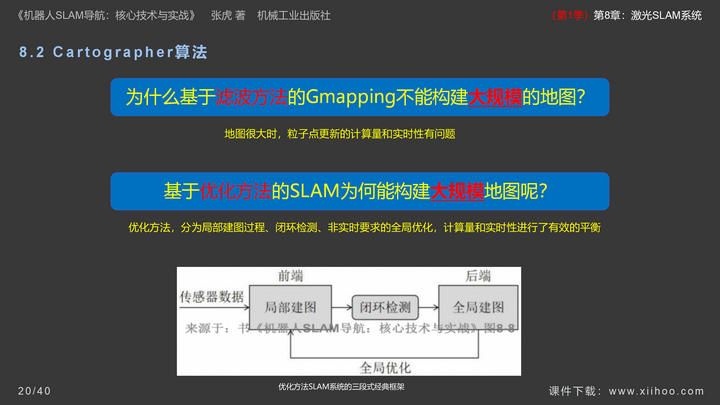
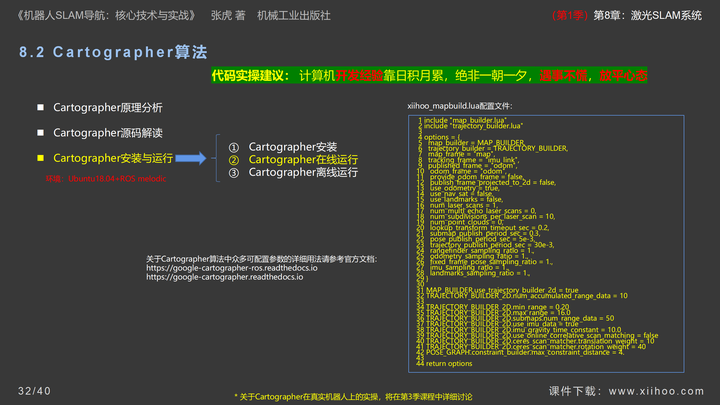
8.2 Cartographer算法
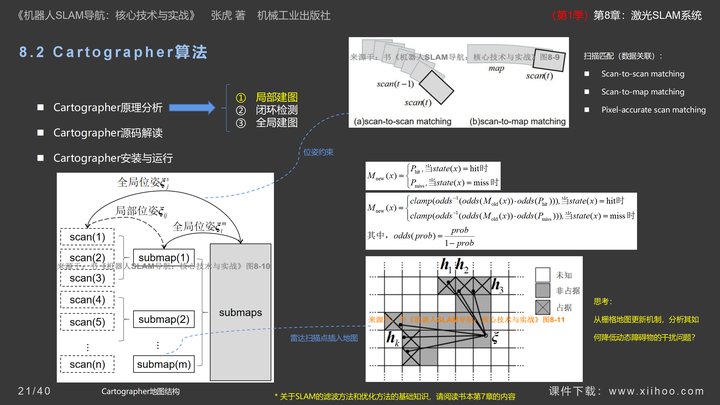
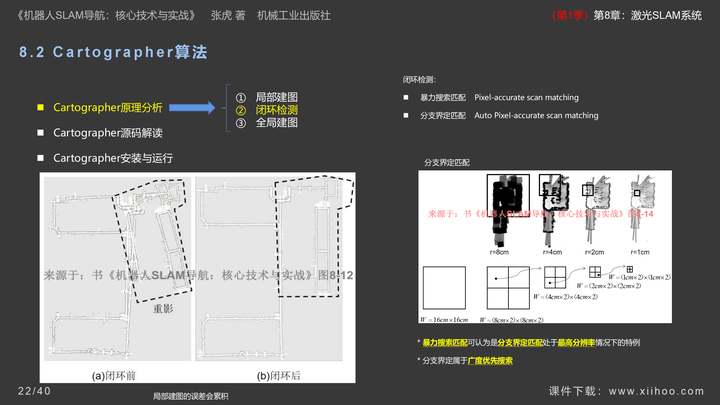
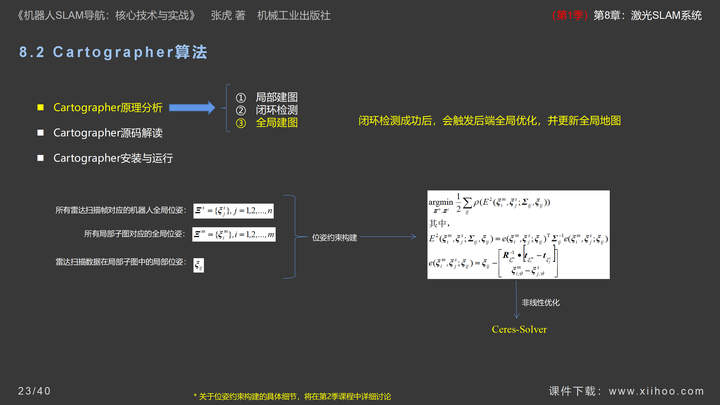
①Cartographer原理分析
局部建图、闭环检测、全局建图
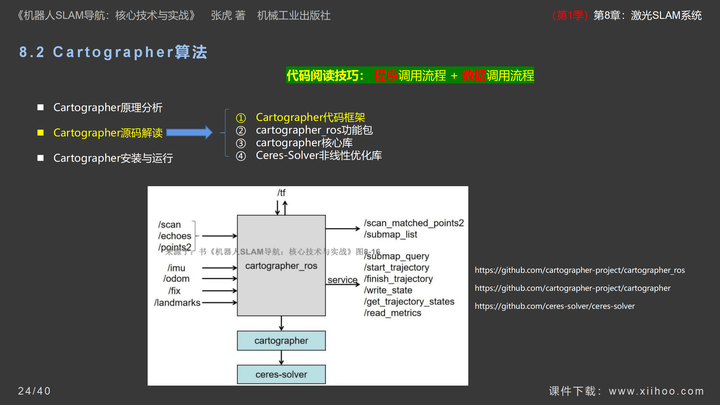
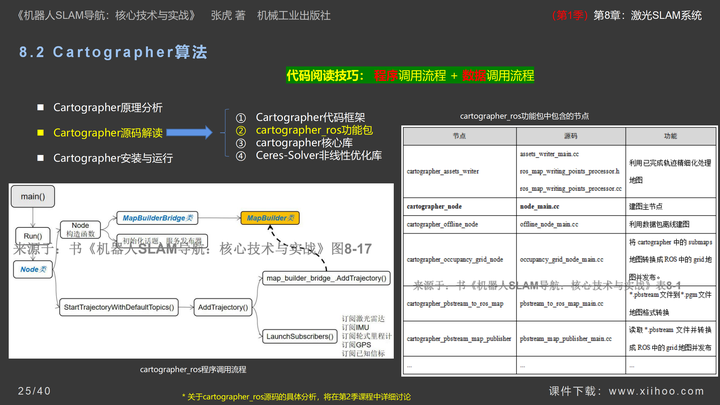
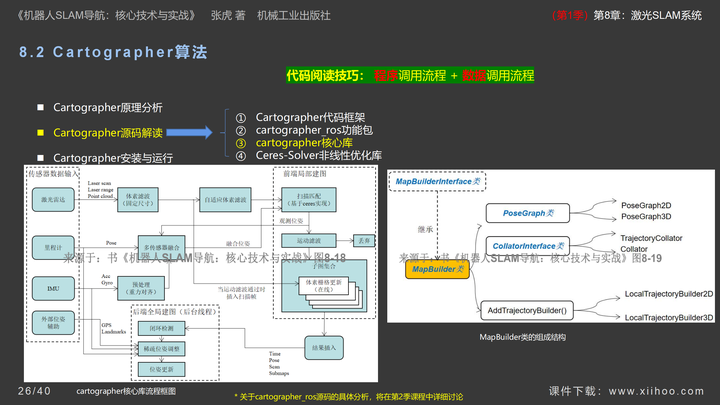
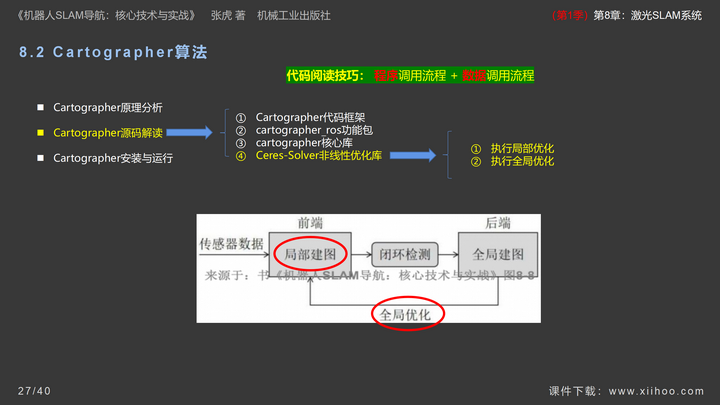
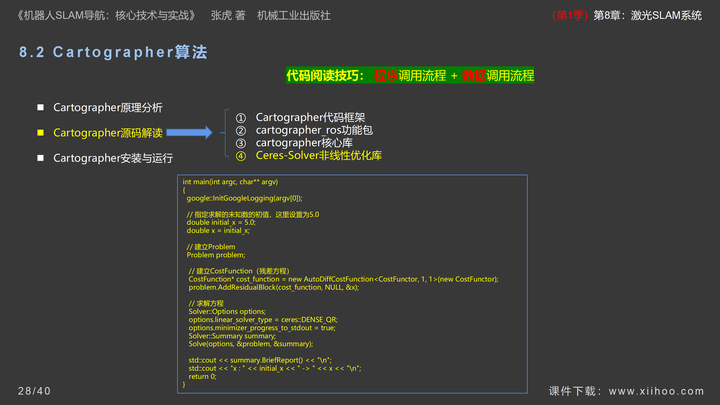
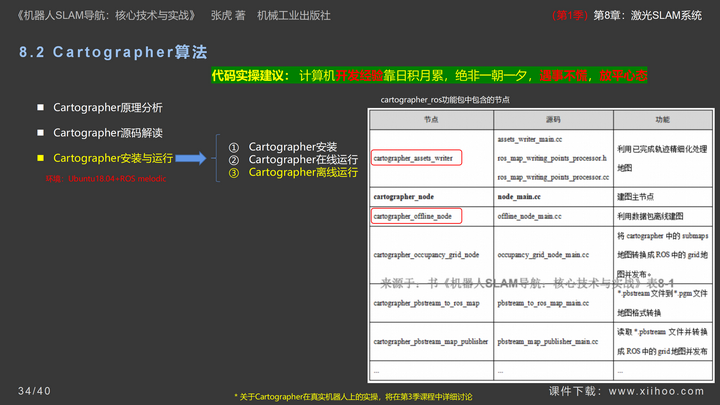
②Cartographer源码解读
Cartographer代码框架、cartographer_ros功能包、cartographer核心库、Ceres-Solver非线性优化库
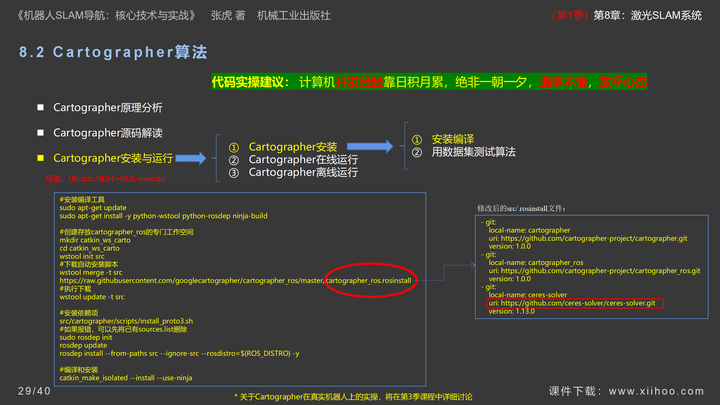
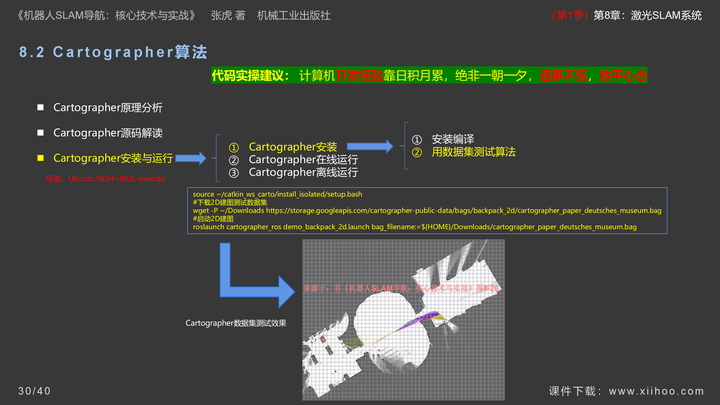
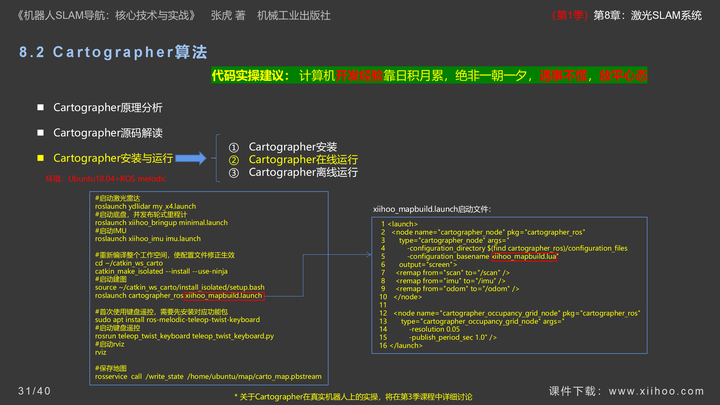
③Cartographer安装与运行
Cartographer安装、Cartographer在线运行、Cartographer离线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
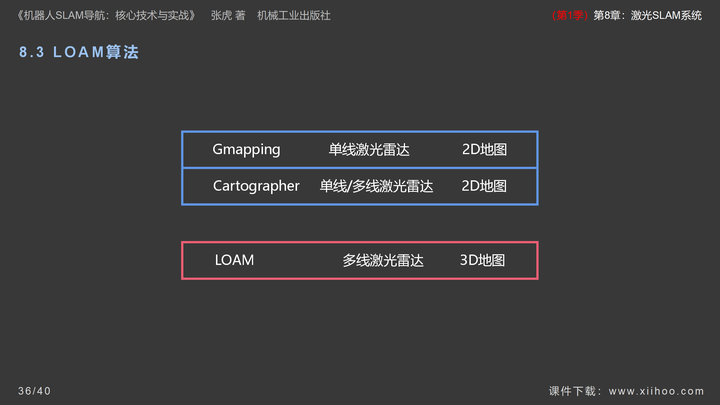
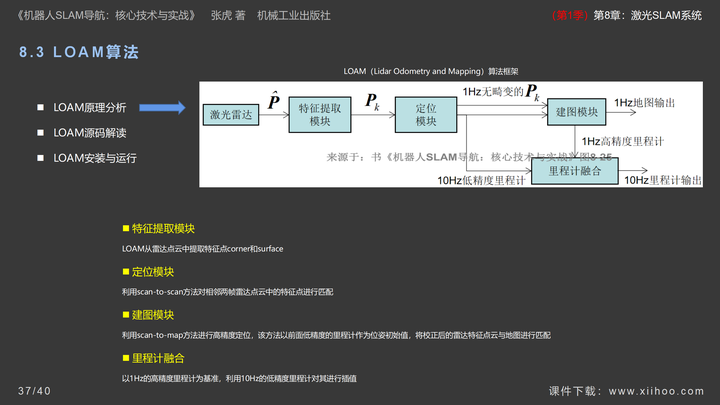
8.3 LOAM算法
①LOAM原理分析
②LOAM源码解读
③LOAM安装与运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载:

