
- 1Unity Shader 入门 一《Shader变量》_unity shader bool
- 2【HarmonyOS】【DevEco Studio】安装教程及环境配置问题解决_deveco studio怎么配置环境
- 3完整的蓝屏错误代码大全详解_蓝屏代码对照表大全
- 4云计算与云原生_云原生 云计算
- 518个8年以上服务器开发经验的面试题(2)
- 6什么是2MSL_2msl是什么意思
- 7【机器学习】单细胞-ZINB loss(零膨胀负二项分布)_zinb分布
- 8SecureCRT连接高版本Linux服务器Key exchange failed问题_key change failed
- 9基于javaweb+mysql的ssm个人日记管理系统(JavaWeb JSP MySQL Servlet SSM SpringBoot Layui Ajax)_javaweb电子日记本系统
- 10HDR基本概念_显示器上的hdr是什么意思csdn
三维重建-单目相机标定_单目相机三维重建代码
赞
踩
文章目录
4、SingleCamera::workIntrinsicAndExtrinsic()
前言
理论知识可以看北邮鲁鹏老师的课程,哔哩哔哩上有。
一、代码讲解
1、SingleCamera
- class SingleCamera {
- public:
- // 构造函数,初始化成员变量
- SingleCamera(Eigen::MatrixXf world_coor, Eigen::MatrixXf pixel_coor, int n)
- : world_coor(world_coor), pixel_coor(pixel_coor), point_num(n),
- P(Eigen::MatrixXf::Zero(2 * n, 12)), M(Eigen::MatrixXf::Zero(3, 4)),
- A(Eigen::MatrixXf::Zero(3, 3)), b(Eigen::MatrixXf::Zero(3, 1)),
- K(Eigen::MatrixXf::Zero(3, 3)), R(Eigen::MatrixXf::Zero(3, 3)),
- t(Eigen::MatrixXf::Zero(3, 1)) {}
-
- // 用像素坐标和世界坐标计算相机矩阵 P
- void composeP();
-
- // 对相机矩阵 P 进行奇异值分解,计算相机内部矩阵 A 和外部矩阵 M
- void svdP();
-
- // 计算相机的内部和外部参数
- void workIntrinsicAndExtrinsic();
-
- // 对标定结果进行自检
- void selfcheck(const Eigen::MatrixXf &w_check, const Eigen::MatrixXf &c_check);
-
- private:
- // 成员变量,存储世界坐标和像素坐标以及相关矩阵
- Eigen::MatrixXf world_coor;
- Eigen::MatrixXf pixel_coor;
- int point_num;
- Eigen::MatrixXf P;
- Eigen::MatrixXf M;
- Eigen::MatrixXf A;
- Eigen::MatrixXf b;
- Eigen::MatrixXf K;
- Eigen::MatrixXf R;
- Eigen::MatrixXf t;
- };

类
SingleCamera实现了与相机标定和 3D 重建相关的功能。该类具有几个成员变量和函数:成员变量:
world_coor:一个Eigen::MatrixXf矩阵,表示世界坐标系中点的 3D 坐标。
pixel_coor:一个Eigen::MatrixXf矩阵,表示相应点在相机图像平面上的 2D 坐标。
point_num:一个整数,表示点的数量。
P:一个大小为2n x 12的Eigen::MatrixXf矩阵,其中n是点的数量。该矩阵用于表示相机矩阵。
M:一个大小为3 x 4的Eigen::MatrixXf矩阵,表示相机矩阵形式为[R|t]。
A:一个大小为3 x 3的Eigen::MatrixXf矩阵,表示相机的内部矩阵。
b:一个大小为3 x 1的Eigen::MatrixXf矩阵,表示相机的平移向量。
K:一个大小为3 x 3的Eigen::MatrixXf矩阵,表示相机的校准矩阵。
2、SingleCamera::compose()
-
- void SingleCamera::compose() {
- 根据输入的二维点和三维点,构造P矩阵
- Eigen::RowVectorXf row(12), p(4);
- float u, v;
- int p_idx = 0;
- for (int i = 0; i < point_num; i++) {
- // 一次生成两个方程系数,用于构造P矩阵
- p = world_coor.row(i);
- u = pixel_coor(i, 0);
- v = pixel_coor(i, 1);
- row << p, // 第一行:三维点
- Eigen::RowVectorXf::Zero(1, 4), // 第一行:第二个四维0向量
- -u * p; // 第一行:负的像素坐标x值乘以三维点坐标
- P.row(p_idx++) = row; // 将该行加入P矩阵中,并将行索引值加1
- row << Eigen::RowVectorXf::Zero(1, 4), // 第二行:第一个四维0向量
- p, // 第二行:三维点
- -v * p; // 第二行:负的像素坐标y值乘以三维点坐标
- P.row(p_idx++) = row; // 将该行加入P矩阵中,并将行索引值加1
- }
-
- std::cout << "P:\n" << P << std::endl;
-
- }
其中的 composeP 函数用于生成 P 矩阵。在计算机视觉中,P 矩阵是一个 3x4 的矩阵,它包含了相机的内参、外参以及相机的位置和姿态等信息,可以用于将三维世界坐标系中的点映射到二维像素坐标系中。
具体地,该函数根据输入的二维点 pixel_coor 和三维点 world_coor,构造 P 矩阵。在生成 P 矩阵的过程中,对于每一个三维点,通过将其与对应的二维点组合构造两个方程式,从而构成一个 2x12 的子矩阵,最后将所有子矩阵组合成一个 2n x 12 的 P 矩阵。其中,n 表示输入的点的数量。
具体实现过程是,在 for 循环中,首先从 world_coor 中取出当前点的三维坐标,然后将其与对应的二维点 pixel_coor(i, 0) 和 pixel_coor(i, 1) 组合,构造出一个 2x1 的向量。接着,在构造 2x12 的子矩阵时,将该向量与一些零元素组合成一个 1x12 的行向量,然后再将该行向量作为子矩阵的第一行,构造出一个 2x12 的子矩阵。具体地,子矩阵的第一行为 [X, Y, Z, 1, 0, 0, 0, 0, -uX, -uY, -uZ, -u],其中 X、Y、Z 分别表示当前点的三维坐标,u 表示当前点的横坐标 pixel_coor(i, 0)。接下来,将该子矩阵加入到 P 矩阵中。然后,再以类似的方式构造出一个第二行为 [0, 0, 0, 0, X, Y, Z, 1, -vX, -vY, -vZ, -v] 的子矩阵,并将其也加入到 P 矩阵中。最终生成的 P 矩阵的大小为 2n x 12。
需要注意的是,该函数并没有对 P 矩阵进行求解,它只是将输入的点转化为 P 矩阵的形式。P 矩阵的求解需要使用其他方法,例如使用 SVD 分解或者直接进行线性求解等。
3、SingleCamera::svdP()
- void SingleCamera::svdP() {
- // homework2: 根据P矩阵求解M矩阵和A、b矩阵
-
- // 使用JacobiSVD求解P矩阵的奇异值分解
- Eigen::JacobiSVD<Eigen::MatrixXf> svd;
- svd.compute(P, Eigen::ComputeThinU | Eigen::ComputeThinV);
-
- // 取出V矩阵的最后一列并重构成4x3矩阵,得到M矩阵
- M = svd.matrixV().col(svd.matrixV().cols() - 1);
- M.resize(4, 3);
- M.transposeInPlace();
-
- // 将M矩阵分解为A和b矩阵
- A = M.leftCols(3); // 3x3的A矩阵
- b = M.rightCols(1); // 3x1的b矩阵
- }
通过输入的二维像素点和对应的三维世界坐标点,求解相机的姿态矩阵。通过对之前构造的P矩阵进行奇异值分解(SVD),得到M矩阵,并将其拆分成A矩阵和b向量的形式。其中M矩阵的最后一列是一个齐次坐标,所以取矩阵V中的最后一列作为M矩阵,并将其resize为4x3的形式。最后通过对M矩阵的拆分得到A矩阵和b向量,A矩阵是一个3x3的矩阵,代表了相机内参,b向量是一个3x1的向量,代表了相机的平移向量。
4、SingleCamera::workIntrinsicAndExtrinsic()
- void SingleCamera::workIntrinsicAndExtrinsic() {
- // homework3: 求解相机的内参和外参
- Eigen::RowVector3f a1(A.row(0)), a2(A.row(1)), a3(A.row(2)); // 将A矩阵的前三行分别作为a1, a2, a3
-
- auto roh = -1 / a3.norm(); // 计算rho,为a3的模长的倒数的相反数
-
- auto cx = roh * roh * (a1.dot(a3)); // 计算cx
- auto cy = roh * roh * (a2.dot(a3)); // 计算cy
-
- auto a1xa3 = a1.cross(a3); // 计算向量a1和a3的叉积
- auto a2xa3 = a2.cross(a3); // 计算向量a2和a3的叉积
- auto cos_theta = -1 * a1xa3.dot(a2xa3) / (a1xa3.norm() * a2xa3.norm()); // 计算cos(theta),即向量a1xa3和a2xa3的点积除以模长的积的相反数
- auto sin_theta = sqrt(1 - cos_theta * cos_theta); // 计算sin(theta)
-
- auto alpha = roh * roh * a1xa3.norm() * sin_theta; // 计算alpha
- auto beta = roh * roh * a2xa3.norm() * sin_theta; // 计算beta
-
- auto r1 = 1 * a2xa3 / a2xa3.norm(); // 计算向量r1
- auto r2 = -r1 * cos_theta / sin_theta - (roh * roh) / alpha * a1xa3; // 计算向量r2
- auto r3 = r1.cross(r2); // 计算向量r3
-
- // calculate the sign of roh
- auto rohs = r3.array() / a3.array(); // 将r3的每个元素都除以a3对应的元素
- if (rohs[0] > 0) { // 如果r3的第一个元素大于0
- roh *= -1; // 取rho的相反数
- }
-
- K(0, 0) = alpha; // 将alpha赋值给K矩阵的(0,0)位置
- K(0, 1) = -alpha * cos_theta / sin_theta; // 将alpha, cos(theta), sin(theta)计算出的值赋给K矩阵的(0,1)位置
- K(0, 2) = cx; // 将cx赋值给K矩阵的(0,2)位置
- K(1, 1) = beta / sin_theta; // 将beta, sin(theta)计算出的值赋给K矩阵的(1,1)位置
- K(1, 2) = cy; // 将cy赋值给K矩阵的(1,2)位置
- K(2, 2) = 1;
- R.row(0) = r1;
- R.row(1) = r2;
- R.row(2) = r3;
- t = roh * K.inverse() * b;
-
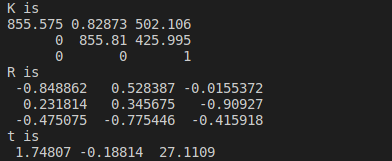
- std::cout << "K is " << std::endl << K << std::endl;
- std::cout << "R is " << std::endl << R << std::endl;
- std::cout << "t is " << std::endl << t.transpose() << std::endl;
- }
在 workIntrinsicAndExtrinsic() 函数中,首先提取矩阵 A 的三行,并根据 A 矩阵的特征推导相机内参,包括焦距(alpha 和 beta)、图像中心的位置(cx 和 cy)和像素间距的尺度因子(roh)。
接下来,根据 A 矩阵推导出的旋转矩阵的第一列 r1,使用旋转矩阵的正交性质推导出 r2 和 r3。
最后,根据推导出的相机内参和外参,计算相机的平移向量 t。
代码的最后,输出相机内参矩阵 K、旋转矩阵 R 和平移向量 t。
5、SingleCamera::selfcheck
- // 传入测试点w_check和对应的像素坐标c_check,计算误差
- void SingleCamera::selfcheck(const Eigen::MatrixXf &w_check, const Eigen::MatrixXf &c_check) {
- float average_err = DBL_MAX;// 将R、t拼接成M矩阵,再用相机内参矩阵K相乘得到投影矩阵P,然后将测试点w_check通过投影矩阵P投影到像素坐标系下
- Eigen::MatrixXf m(3, 4);
- m << R, t;
- auto trans_xyz = w_check * (K * m).transpose();
-
- // 逐个计算每个像素坐标的误差
- for (int i = 0; i < c_check.rows(); ++i) {
- if (i == 0) average_err = 0;
-
- // 计算投影后的点在像素坐标系下的坐标值
- auto trans_z = trans_xyz(i, 2);
- auto trans_x = trans_xyz(i, 0) / trans_z;
- auto trans_y = trans_xyz(i, 1) / trans_z;
-
- // 计算投影后的点和对应测试点的误差,并将误差累加
- average_err += abs(trans_x - c_check(i, 0));
- average_err += abs(trans_y - c_check(i, 1));
- }
-
- // 计算平均误差
- average_err /= c_check.size();
-
- // 输出结果
- std::cout << "The average error is " << average_err << "," << std::endl;
- if (average_err > 0.1) {
- std::cout << "which is more than 0.1" << std::endl;
- } else {
- std::cout << "which is smaller than 0.1, the M is acceptable" << std::endl;
- }
用于对相机参数进行自检。输入是两个矩阵w_check和c_check,分别表示世界坐标系下的点和相机图像平面上对应的点。函数的作用是利用之前通过作业3求解得到的相机参数,计算这些参数对给定的测试点的投影误差,判断相机参数的有效性。具体实现过程如下:
首先,通过将旋转和平移向量组合成一个3x4的矩阵,构造一个包含所有相机参数的矩阵m。然后,将这个矩阵与内部矩阵K相乘,得到一个3x3的投影矩阵P,再将其与世界坐标系下的点w_check相乘,得到一个3xN的齐次坐标矩阵trans_xyz,其中N表示测试点的数量。
接下来,对于每一个测试点,通过齐次坐标矩阵中对应的第i行,计算出点的三维坐标。具体来说,先将trans_xyz中第i行的第三个元素作为点的Z坐标,然后将其它两个元素分别除以这个Z坐标,得到点在相机坐标系下的X和Y坐标。这些坐标可以通过在内部矩阵K中乘以它们来得到对应的像素坐标。
最后,通过计算每个测试点的投影误差,得到所有测试点的平均误差。如果这个平均误差大于0.1,则认为相机参数不够精确,否则认为参数有效。函数将输出平均误差以及相机参数是否有效的信息。
二、完整代码
- #include <iostream>
- #include <vector>
- #include <cmath>
- #include <cfloat>
- #include <eigen3/Eigen/Dense>
- #include <eigen3/Eigen/SVD>
-
- class SingleCamera {
- public:
- SingleCamera(Eigen::MatrixXf world_coor, Eigen::MatrixXf pixel_coor, int n)
- : world_coor(world_coor), pixel_coor(pixel_coor), point_num(n),
- P(Eigen::MatrixXf::Zero(2 * n, 12)), M(Eigen::MatrixXf::Zero(3, 4)),
- A(Eigen::MatrixXf::Zero(3, 3)), b(Eigen::MatrixXf::Zero(3, 1)),
- K(Eigen::MatrixXf::Zero(3, 3)), R(Eigen::MatrixXf::Zero(3, 3)),
- t(Eigen::MatrixXf::Zero(3, 1)) {}
-
- void composeP();
-
- void svdP();
-
- void workIntrinsicAndExtrinsic();
-
- void selfcheck(const Eigen::MatrixXf &w_check, const Eigen::MatrixXf &c_check);
-
- private:
- Eigen::MatrixXf world_coor;
- Eigen::MatrixXf pixel_coor;
- int point_num;
-
- // 变量都是与课程PPT相对应的
- Eigen::MatrixXf P;
- Eigen::MatrixXf M;
- Eigen::MatrixXf A;
- Eigen::MatrixXf b;
- Eigen::MatrixXf K;
- Eigen::MatrixXf R;
- Eigen::MatrixXf t;
- };
-
- void SingleCamera::composeP() {
- // homework1: 根据输入的二维点和三维点,构造P矩阵
- Eigen::RowVectorXf row(12), p(4);
- float u, v;
- int p_idx = 0;
- for (int i = 0; i < point_num; i++) {
- // 一次生成两个方程系数
- p = world_coor.row(i);
- u = pixel_coor(i, 0);
- v = pixel_coor(i, 1);
- row << p,
- Eigen::RowVectorXf::Zero(1, 4),
- -u * p;
- P.row(p_idx++) = row;
- row << Eigen::RowVectorXf::Zero(1, 4),
- p,
- -v * p;
- P.row(p_idx++) = row;
- }
-
- // std::cout << "P:\n" << P << std::endl;
-
- }
-
- void SingleCamera::svdP() {
- // homework2: 根据P矩阵求解M矩阵和A、b矩阵
- Eigen::JacobiSVD<Eigen::MatrixXf> svd;
- svd.compute(P, Eigen::ComputeThinU | Eigen::ComputeThinV);
- M = svd.matrixV().col(svd.matrixV().cols() - 1);
- M.resize(4, 3);
- M.transposeInPlace();
- A = M.leftCols(3); //[3, 3]
- b = M.rightCols(1); //[3, 1]
- }
-
- void SingleCamera::workIntrinsicAndExtrinsic() {
- // homework3: 求解相机的内参和外参
- Eigen::RowVector3f a1(A.row(0)), a2(A.row(1)), a3(A.row(2));
-
- auto roh = -1 / a3.norm();
-
- auto cx = roh * roh * (a1.dot(a3));
- auto cy = roh * roh * (a2.dot(a3));
-
- auto a1xa3 = a1.cross(a3);
- auto a2xa3 = a2.cross(a3);
- auto cos_theta = -1 * a1xa3.dot(a2xa3) / (a1xa3.norm() * a2xa3.norm());
- auto sin_theta = sqrt(1 - cos_theta * cos_theta);
-
- auto alpha = roh * roh * a1xa3.norm() * sin_theta;
- auto beta = roh * roh * a2xa3.norm() * sin_theta;
-
- // auto r1 = a2xa3 / a2xa3.norm();
- // auto r3 = a3 / a3.norm();
- // auto r2 = r3.cross(r1);
- auto r1 = 1 * a2xa3 / a2xa3.norm();
- auto r2 = -r1 * cos_theta / sin_theta - (roh * roh) / alpha * a1xa3;
- auto r3 = r1.cross(r2);
- // calculate the sign of roh
- auto rohs = r3.array() / a3.array();
- if (rohs[0] > 0) {
- roh *= -1;
- }
-
- K(0, 0) = alpha;
- K(0, 1) = -alpha * cos_theta / sin_theta;
- K(0, 2) = cx;
- K(1, 1) = beta / sin_theta;
- K(1, 2) = cy;
- K(2, 2) = 1;
- R.row(0) = r1;
- R.row(1) = r2;
- R.row(2) = r3;
- t = roh * K.inverse() * b;
-
- std::cout << "K is " << std::endl << K << std::endl;
- std::cout << "R is " << std::endl << R << std::endl;
- std::cout << "t is " << std::endl << t.transpose() << std::endl;
- }
-
- void SingleCamera::selfcheck(const Eigen::MatrixXf &w_check, const Eigen::MatrixXf &c_check) {
- float average_err = DBL_MAX;
- // homework4: 根据homework3求解得到的相机的参数,使用测试点进行验证,计算误差
- Eigen::MatrixXf m(3, 4);
- m << R, t;
-
- auto trans_xyz = w_check * (K * m).transpose();
-
- for (int i = 0; i < c_check.rows(); ++i) {
- if (i == 0) average_err = 0;
- auto trans_z = trans_xyz(i, 2);
- auto trans_x = trans_xyz(i, 0) / trans_z;
- auto trans_y = trans_xyz(i, 1) / trans_z;
- average_err += abs(trans_x - c_check(i, 0));
- average_err += abs(trans_y - c_check(i, 1));
- }
- average_err /= c_check.size();
-
- std::cout << "The average error is " << average_err << "," << std::endl;
- if (average_err > 0.1) {
- std::cout << "which is more than 0.1" << std::endl;
- } else {
- std::cout << "which is smaller than 0.1, the M is acceptable" << std::endl;
- }
- }
-
- int main(int argc, char **argv) {
- // 三维世界坐标系中的点
- Eigen::MatrixXf w_xz(4, 4);
- w_xz << 8, 0, 9, 1,
- 8, 0, 1, 1,
- 6, 0, 1, 1,
- 6, 0, 9, 1;
-
- Eigen::MatrixXf w_xy(4, 4);
- w_xy << 5, 1, 0, 1,
- 5, 9, 0, 1,
- 4, 9, 0, 1,
- 4, 1, 0, 1;
-
- Eigen::MatrixXf w_yz(4, 4);
- w_yz << 0, 4, 7, 1,
- 0, 4, 3, 1,
- 0, 8, 3, 1,
- 0, 8, 7, 1;
-
- // 三维世界坐标系中的所有点
- Eigen::MatrixXf w_coor(12, 4);
- w_coor << w_xz,
- w_xy,
- w_yz;
-
- // 对应的图像坐标系中的点
- Eigen::MatrixXf c_xz(4, 2);
- c_xz << 275, 142,
- 312, 454,
- 382, 436,
- 357, 134;
-
- Eigen::MatrixXf c_xy(4, 2);
- c_xy << 432, 473,
- 612, 623,
- 647, 606,
- 464, 465;
-
- Eigen::MatrixXf c_yz(4, 2);
- c_yz << 654, 216,
- 644, 368,
- 761, 420,
- 781, 246;
-
- // 对应的图像坐标系中的所有点
- Eigen::MatrixXf c_coor(12, 2);
- c_coor << c_xz,
- c_xy,
- c_yz;
-
- // 定义SingleCamera对象,传入三维世界坐标系中所有点和对应的图像坐标系中的点,共使用12个点
- SingleCamera aCamera = SingleCamera(w_coor, c_coor, 12);
-
- aCamera.composeP(); // 用所有点求解P矩阵
- aCamera.svdP(); // 对P矩阵进行奇异值分解
- aCamera.workIntrinsicAndExtrinsic(); // 求解相机的内外参数
-
- // 使用测试点进行验证,计算误差
- Eigen::MatrixXf w_check(5, 4);
- w_check << 6, 0, 5, 1,
- 3, 3, 0, 1,
- 0, 4, 0, 1,
- 0, 4, 4, 1,
- 0, 0, 7, 1;
-
- Eigen::MatrixXf c_check(5, 2);
- c_check << 369, 297,
- 531, 484,
- 640, 468,
- 646, 333,
- 556, 194;
-
- SingleCamera aCamera = SingleCamera(w_coor, c_coor, 12); // 12 points in total are used
- aCamera.composeP();
- aCamera.svdP();
- aCamera.workIntrinsicAndExtrinsic();
- aCamera.selfcheck(w_check, c_check); // test 5 points and verify M
-
-
- return 0;
- }
三、 Cmake配置
- cmake_minimum_required(VERSION 3.10)
-
-
- set(CMAKE_BUILD_TYPE release)
- set(CMAKE_CXX_FLAGS_RELEASE "-O3 -fPIC")
- set(CMAKE_MODULE_PATH ${CMAKE_MODULE_PATH} "${CMAKE_SOURCE_DIR}/cmake")
-
- find_package(Eigen 3.0 REQUIRED)
-
- add_executable(camera_calib main.cpp )
-
总结
工程编译和运行:
编译:
cd calibration_algorithm
mkdir build
cd build
cmake ..
make运行:
./camera_calib
运行的结果将在命令行中显示出来

