
- 1test测试文档_文档test
- 2paho.mqtt.c使用的总结_paho.mqtt.cpp 手册
- 3python pool.map 多线程 多参数_pool.map多个参数
- 4如何在MAC 指定文件夹打开终端(terminal)_macos13怎么在指定文件夹开启终端
- 5最新版go-cqhttp的sign搭建教程和新版傻妞需要的插件
- 6树莓派通过网线连接电脑(校园网也能连接),实现SSH连接_树莓派ssh连接笔记本电脑
- 75600U PVE安装WIN10后直通核显_pve核显直通
- 8android打开相册的intent,Android 调用相机、打开相册、裁剪图片
- 9散布矩阵(scatter_matrix)及相关系数(correlation coefficients)实例分析
- 10node.js 安装及配置环境变量只看此文_node环境变量设置
点云数据的类型主要分为_技术日志-一个名校硕士对三维点云处理技术的看法(下)...
赞
踩
3、三维点云处理技术有哪些方面?
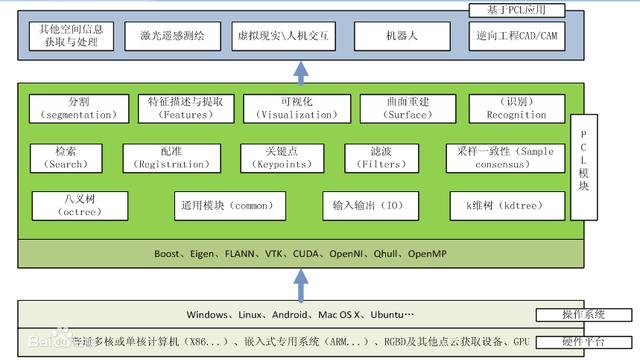
图1 PCL点云库的结构图
这里根据PCL点云库的结构图介绍一下点云处理技术包含哪些方面,实际工程应用中涉及到的很多技术都离不开这些基础点云处理技术。PCL基于第三方库:Boost、Eigen、FLANN、VTK、CUDA、OpenNI、Qhull,实现了点云相关的获取、滤波、分割、配准、检索、特征提取、识别、曲面重建、可视化等功能。
3.1 滤波
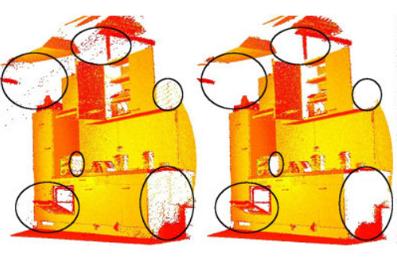
图2 滤波
在获取点云数据时,由于设备精度、操作者经验、环境因素等带来的影响,以及电磁波衍射特性、被测物体表面性质变化和数据拼接配准操作过程的影响,点云数据中将不可避免地出现一些噪声点。实际应用中除了这些测量随机误差产生的噪声点之外,由于受到外界干扰如视线遮挡,障碍物等因素的影响,点云数据中往往存在着一些离主体点云即被测物体点云较远的离散点,即离群点,不同的获取设备点云噪声结构也有不同,其他可以通过滤波重采样完成的工作,可以是孔洞修复、信息损失最小海量点云数据压缩处理等。在点云处理流程中滤波处理作为预处理的第一步,往往对后续处理管道影响很大,只有在滤波预处理中将噪声点、离群点、孔洞、数据压缩等按照后续处理定制,才能够更好地进行配准、特征提取、曲面重建、可视化等后续应用处理。
PCL针对下采样、去除噪声、去除离群点、平滑处理、以及去除指定点云等问题,给出了体素化下采样、半径滤波、统计滤波、双边滤波、高斯滤波、条件滤波等滤波方法。
3.2 关键点提取

图3 关键点提取
在二维图像上,有Harris、SIFT、SURF、KAZE这样的关键点提取算法,这种特征点的思想可以推广到三维空间。从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术。PCL对常用的关键点提取方法都有实现。
3.3 特征与特征描述

图4 特征提取与描述
3D点云特征描述与提取是点云信息处理中的最基础也是最关键的的一部分,点云识别、分割、重采样、配准、曲面重建等处理大部分算法,都严重依赖特征描述与提取的结果。从尺度上来分,一般分为局部特征描述和全局特征描述,例如局部的法线、等几何形状特征的描述,全局的拓扑特征描述,都属于3D点云特征描述与提取范畴。
针对特征提取与描述,PCL给出了计算法线和曲率的方法,给出了3D shape contexts、spin image、PFH、FPFH等特征描述方法。
3.4 点云配准/拼接/注册
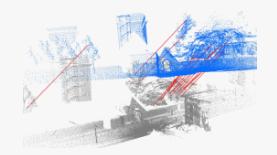
图5 点云配准/拼接/注册
随着计算机辅助设计技术的发展,通过实物模型产生数字模型的逆向工程技术由于它的独特魅力获得了越来越广泛的应用,与此同时,硬件设备的日趋完善也为数字模型操作提供了足够的技术支持。在逆向工程、计算机视觉、文物数字化等领域中,由于点云的不完整、旋转错位、平移错位等,使得要得到完整点云就需要对局部点云进行配准。为了得到被测物体的完整数据模型,需要确定一个合适的坐标变换,将从各个视角得到的点集合并到一个统一的坐标系下形成一个完整的数据点云,然后就可以方便地进行可视化等操作,这就是点云数据的配准。点云配准有手动配准、依赖仪器的配准和自动配准。通常我们所说的点云配准技术即是指最后一种自动配准。点云自动配准技术是通过一定的算法或者统计学规律,利用计算机计算两块点云之间的错位,从而达到把两片点云自动配准的效果。其实质是把在不同的坐标系中测量得到的数据点云进行坐标变换,以得到整体的数据模型。问题的关键是如何求得坐标变换参数RC旋转矩阵和TC平移向量,使得两视角下测得的三维数据经坐标变换后的距离最小。(跟测量学的自由移站法原理一样)目前,配准算法按照实现过程可以分为整体配准和局部配准。
PCL实现了配准相关的基础数据结构与经典配准算法,如ICP、4PCS、NDT以及他们的一些改进方法等,还有配准过程中的对应点估计、错误对应点去除等方法。
3.4 点云分割

图6 点云分割
点云分割是根据空间、几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征。 点云的有效分割往往是许多应用的前提,例如,在逆向工程CAD/CAM 领域对零件的不同扫描表面进行分割,然后才能更好地进行孔洞修复、 曲面重建、特征描述和提取,进而进行基于3D内容的检索、组合重用等。 在激光遥感领域,同样需要对地物首先进行分类处理,然后才能进行后期地物的识别、重建。总之,分割采用分而治之的思想在点云处理中和滤波一样属于重要的基础操作。
PCL针对点云的区域分割、特殊几何基元提取、连通分析等给出了区域生长法、RANSAC等多种方法。
3.5 点云数据管理

图7 数据结构
通过雷达、激光扫描、立体摄像机等三维测量设备获取的点云数据,具有数据量大、分布不均匀等特点。 作为三维领域中一个重要的数据来源,点云数据主要是表征目标表面的海量点集合,并不具备传统实体网格数据的几何拓扑信息。 所以点云数据处理中最为核心的问题就是建立离散点间的拓扑关系,实现基于邻域关系的快速查找。建立空间索引在点云数据处理中已被广泛应用,而KD树和八叉树在3D点云数据组织中应用较为广泛。
kd-tree 或者 k维树是计算机科学中使用的一种数据结构,用来组织表示k维空间中点集合。 它是一种带有其他约束条件的二分查找树。 kd-tree 对于区间和近邻搜索十分有用。 我们为了达到目的,通常只在三个维度中进行处理,因此所有的kdtree 都将是三维 kd tree。
八叉树结构通过对三维空间的几何实体进行体元剖分,每个体元具有相同的时间和空间复杂度,通过循环递归的划分方法对大小为 2n×2n×2n的三维空间的几何对象进行剖分,从而构成一个具有根节点的方向图。在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成一个叶节点;否则继续对该体元剖分成个子立方体,依次递归剖分,对于2n×2n×2n 大小的空间对象,最多剖分n次。
3.6 三维重建
曲面重建技术在逆向工程、数据可视化、机器视觉、虚拟现实、医疗技术等领域中得到了广泛的应用。 例如,在汽车、航空等工业领域中,复杂外形产品的设计仍需要根据手工模型,采用逆向工程的手段建立产品的数字化模型;根据测量数据建立人体以及骨髓和器官的计算机模型在医学、定制生产等方面都有重要意义。 除了上述传统的行业,随着新兴的廉价RGBD获取设备在数字娱乐行业的病毒式扩展,使得更多人开始使用点云来处理对象并进行工程应用。 根据重建曲面和数据点云之间的关系可将曲面重建分为两大类:插值法和逼近法。 前者得到的重建曲面完全通过原始数据点,而后者则是用分片线性曲面或其他形式的曲面来逼近原始数据点,从而使得得到的重建曲面是原始点集的一个逼近。 而根据重建曲面的表现形式不同又可以将它分为以下5种:参数曲面重建、隐式曲面重建、变形曲面重建、细分曲面重建和分片线性曲面重建。
PCL中给出了泊松重建、移动立方体算法、贪婪三角化等算法等。
3.7 其他
PCL也对点云处理技术的研究提供了点云文件输入输出功能、可视化功能等。另外,还有一些更高层次的点云处理技术,比如目标检测识别、场景重建等等,现在利用深度学习做这些方面的处理还比较热门。
来源:土拨虎机器人行业互动全媒体


