
- 1【Android 逆向】Android 中常用的 so 动态库 ( /system/lib/libc.so 动态库 | libc++.so 动态库 | libstdc++.so 动态库 )
- 2三大框架SSM基础知识点_ssm框架
- 3Quake4的gui_r语言关于quake实验
- 4【扩散模型】3、Stable Diffusion 原型 | High-Resolution Image Synthesis with Latent Diffusion Models_潜在扩散模型 img to img
- 5Dlib模型之驾驶员疲劳检测一(眨眼)_dlib疲劳检测
- 6uniapp开发小程序登录功能并获取token_uniapp接收token
- 7java图表库_Java版ECharts图表库ECharts-Java
- 8Android不经过第三方\官方SDK直接使用Intent快捷实现QQ微信分享_android 不是有第三方sdk分享网页链接
- 9OpenHarmony开源鸿蒙无人机来了_鸿蒙系统与无人机连接
- 10嵌入式linux之QT交叉编译环境搭建(最简单实测通用版)
计算机系统结构--复习(Part 1)_超级计算机属于计算机系统结构吗
赞
踩
适用于期末考试之前的知识点复习.
往期回顾:
Part 1(chapter 1 - chapter 5):https://blog.csdn.net/zongza/article/details/83780572
Part 2(chapter 5 - chapter 10):https://blog.csdn.net/zongza/article/details/83933327
Part 3(概念专辑):https://blog.csdn.net/zongza/article/details/84100133
Part 4(习题专辑):https://blog.csdn.net/zongza/article/details/84111578
资料下载:
计算机体系结构-量化研究方法-Hennessy&Patterson著(英文版):https://download.csdn.net/download/zongza/10787837
计算机体系结构-量化研究方法-Hennessy&Patterson著(中文版):https://download.csdn.net/download/zongza/10787840
计算机系统结构教程-第二版-张晨曦著:https://download.csdn.net/download/zongza/10787843
计算机体系结构教程-学习指导与题解:https://download.csdn.net/download/zongza/10793886
Chapter 1 Introduction
nClasses of Computers * 计算机种类
nMoore’s Law * 摩尔定律
nWhat is Computer Architecture * 两个概念
- qclassical definition 概念性结构和功能特性
- qbroadest definition 抽象层设计
- q计算机系统结构与计算机组成、实现的关系
nAttributes of a System as seen by the Programmer 程序员看到的计算机属性
计算机种类
1、巨型计算机(Supercomputer),也称超级计算机,它采用了大规模并行处理的体系结构,CPU由数以百计、千计的处理器组成,有极强的运算处理能力,大多5使用在军事、科研、气象、石油勘探等领域。
2、小巨型计算机(Mini Supercomputer),与巨型机相同,但使用了更加先进的大规模集成电路与制造技术,因而体积小、成本低,甚至可以做成桌面机形式,放在用户的办公桌上,便于巨型机的推广使用。
3、主机(Mainframe),或称主干机、大型机。
4、小型计算机(Super Minicomputer)
5、工作站(Workstation),指SGI、SUN、DEC、HP、IBM等大公司推出的具有高速运算能力和很强图形处理功能的计算机。
6、个人计算机(Personal Computer),也称个人电脑(PC机)或微型计算机,它们价格便宜、性能不断提高,适合个人办公或家庭使用。
摩尔定律:
1、集成电路芯片上所集成的电路的数目,每隔18个月就翻一番。
2、微处理器的性能每隔18个月提高一倍,而价格下降一倍。
什么是计算机系统结构:
classical definition--程序员所看到的计算机的属性,即程序员编写出的能在机器上正确运行的程序所必须了解到的概念性结构和功能特性。
broadest definition(宽泛定义)--使用各种可行的制造工艺进行抽象层的设计,使得应用程序有效运行。


上图为传统的系统结构定义示例:系统结构是处在物理层和应用层之间的一层抽象。
下图中显示了将系统结构进行细分的若干子层次,以及定义的发展趋势:+-到ISA到CPU IO MEM MP 到网络



计算机系统结构与计算机组成、实现的关系:
传统机器级的系统结构,软件与硬件/固件的交接面,是机器语言、汇编语言编程者,或编译程序设计者看到的机器物理系统的抽象。可以看作和ISA完全划等号,但是对于现代的CA,ISA只是他的一个子集,CA还会包括Design of CPU, memory system, I/O system, Multiprocessors
•系统结构 指的计算机系统中对各级之间界面的定义及其上下的功能分配。
•组成 指结构的逻辑实现,包括机器级内的数据流和控制流的组成以及逻辑设计等。
•实现 指组成的物理实现,着眼于器件技术和微组装技术。
指令系统(ISA)的确定属于系统结构
取指、取操作数、运算送结果等具体操作及其排序方式属于组成
具体电路、器件的设计及装配技术等属于实现
计算机系统“从中间开始设计”方法中的中间是指什么地方,这样设计有什么好处?
中间指软硬件交界面,也就是抽象层的设计,在传统机器语言和操作系统机器级之间,好处是软硬可以并行设计,缩短周期。
程序员看到的计算机属性:
(1) 数据表示(硬件能直接辩认和处理的数据类型)
(2) 寻址规则(包括最小寻址单元、寻址方式及其表示)
(3) 寄存器定义(包括各种寄存器的定义、数量和使用方式)
(4) 指令集(包括机器指令的操作类型和格式、指令间的排序和控制机构等)
(5) 中断系统(中断的类型和中断响应硬件的功能等)
(6) 机器工作状态的定义和切换 (如管态和目态等)
(7) 存储系统(主存容量、程序员可用的最大存储容量等)
(8) 信息保护(包括信息保护方式和硬件对信息保护的支持)
(9) I/O结构(包括I/O连接方式、处理机/存储器与I/O设备 间数据传送的方式和格式以及I/O操作的状态等)
Chapter 2 Fundamentals
nWhy Such Change in 20 years? * 性能、价格与功能
nEnd of the Uniprocessor Era ** 单核处理器时代的终结
- qSome Walls, New Moore’s Law
nSea Change in Chip Design *
nRAMP project & What is FPGA
nNew Trends in Computer Design* ->GPGPU / Xeon Phi
nAmdahl’s Law ** 阿姆达尔定律
nProcessor performance equation **
Why Such Change in 20 years? :
Performance性能:
- Technology Advances技术工艺的进步(在成本和性能上超越了较老的工艺技术)
- Computer architecture advances improves low-end 计算机体系结构的进步,改进了低端系统的性能(如RISC)
Price价格: Lower costs due to …
- Simpler development 开发更简单(系统更小、部件更少(集成度高、功能强大))
- Higher volumes 容量更大
Function功能
- Rise of networking/local interconnection technology 联网/局部互联技术的高速发展


四堵墙:
频率墙():工艺进入超深亚微米后,线延时超过门延时而占据主导地位;
功耗墙(Power Wall):漏流增大,功耗增大,导致芯片过热,器件的稳定性下降,信号噪声增大,无法正常工作;
存储墙(Memory Wall):通信带宽和延迟构成;
应用墙():每一种处理器在各自的领域内都有着很高的性能。但如果应用条件发生变化则会导致性能明显下降,导致通用微处理器并不通用。
其他:ILP wall & Power Wall + ILP Wall + Memory Wall = Brick Wall

新摩尔定律:
- DLP比TLP带来的并行计算的能力增长更多
- 翻倍的不再是晶体管(集成电路)和处理器速度,而是processor的数量,未来计算机硬件不会更快,但是会更宽.(比如并行处理能力)
芯片(chip)设计的巨变(sea change):
- 越来越长:字长4,8,16,32,64...
- 越来越快:速度
- 越来越多:多核(趋势:单核->多核->众核群核)
芯片巨变带来的问题:
- 软件上 算法和编译器等不能支持DLP和TLP
- 硬件上 体系结构无法支持太多的核共存在一个芯片上
RAMP和FPGA
GPU和CPU的区别:
CPU: 面向通用计算 ,大量的晶体管用于Cache和控制电路
GPU:面向计算密集型和大量数据并行化的计算, 大量的晶体管用于计算单元
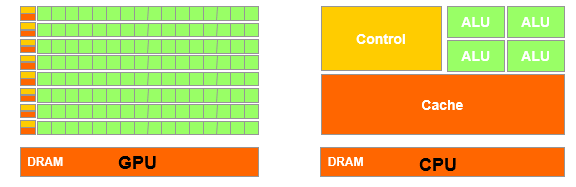
New Trends :putting all onto one chip(把cpu,gpu,io,ddr做到一个芯片上)

阿姆达尔定律:
What is frequent case and how much performance improved by making case faster
1:Fraction_enhanced(增强比例):计算机执行某个任务的总时间中可被改进部分的时间所占的百分比.
2:Speedup_enhanced(增强加速比):改进部分采用改进措施后比没有采用改进措施前性能提高倍数(旧时间/新时间)

处理器(processor)性能(performance)指标计算:

例题:在计算机系统中,某一功能的处理时间为整个系统运行时间的50%,若使该功能的处理速度加快10倍,根据Amdahl定律,这样做可以使整个系统的性能提高____倍。若要使整个系统的性能提高1.5倍,则该功能的处理速度应加快____倍。
Chapter 3 ISA
nWhat is Instruction Set Architecture? How is it represented? * 指令集架构
nRISC vs. CISC *
nClassifying Instruction Set Architectures by the type of internal storage in a processor * 内部存储类型
nInstruction Characteristics
nEndian order * 端序/字节序 小端和大端 以及 对齐(alignment)
nStructure of Recent Compilers: Multi-pass structure
nMIPS Architecture & MIPS Instruction Format
什么是ISA?How is it represented(如何表示指令)?:
a set of instructions,且每条指令都是由cpu硬件来执行的. 用二进制的形式存储指令集,有定长指令和不定长指令.
RISC与CISC
CISC:复杂指令集架构,追求更强大的指令,减少程序的指令条数,并交由硬件实现。
RISC:精简指令集架构,追求更少更简单的指令和更低的CPI
RISC设计原则:
- 简单统一的指令格式(所有指令长度均相同),减少寻址方式
- 每条指令的功能应尽可能简单,并在一个机器周期内完成
- 只有load store可以访存,其他操作都是在寄存器上
- 以简单有效的方式支持高级语言
- 强调优化编译器的作用
- 强调流水线技术
ISA的分类(分类依据:用来存放操作数的存储单元类型):

(其中寄存器型又包括r-r型和r-m型)
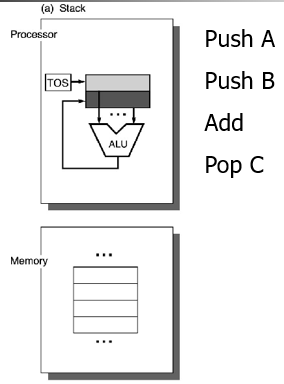
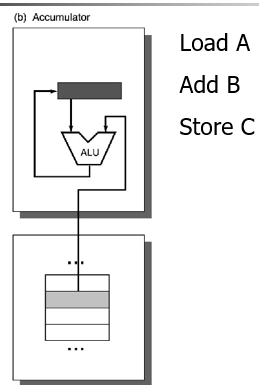


只有寄存器型沿用至今,区分GPR ISA的方法是看指令中mem address的个数和操作数(operands)的个数

ALU指令中,存储器操作数个数和操作数个数的所有可能组合只有七种,不可能有(3,2),也就是指令有三个地址却只需要两个操作数.

小端序和大端序:
小端序:低字节保存在低地址
大端序:低字节保存在高地址
举例:
var = 0x11223344,对于这个变量的最高字节为0x11,最低字节为0x44
(1)大端模式存储(存储地址为16位) (2)小端模式存储(存储地址为16位)
地址 数据 地址 数据
0x0004(高地址) 0x44 0x0004(高地址) 0x11
0x0003 0x33 0x0003 0x22
0x0002 0x22 0x0002 0x33
0x0001(低地址) 0x11 0x0001(低地址) 0x44


Chapter 4 Pipelining *
nConcepts and Characteristics of Pipelining * 流水线相关概念与特点
nFive steps every instruction be executed in? Fill and Drain.* 流水的5个阶段;通过时间与排空时间
nStructural hazards, Data hazards and Control hazards * 结构冲突、数据冲突、控制冲突
nWhat is stall in pipeline? What happens when a instruction is stalled.
nThree Generic Data Hazards: RAW,WAR,WAW *
nHow to Avoid 3 kinds of Hazards? * 避免/解决冲突
nPerformance Issues in Pipelining. ** 性能:时空图
关于流水线的几个特点:

对于每个stage时长不一样的,先把最长的那个stage(对应图中的蓝色线段)连起来,然后在每段蓝色线左右补充前后的stage
流水线的相关概念和特点:
流水线:将一个重复的时序过程分解成为若干个子过程(称为段,段数也是流水线的深度),而每个子过程都由专用功能部件实现。把多个处理过程在时间上错开,依次通过各功能段,这样不同子过程就能并行执行。流水线不会加速指令的执行时间而是改善整体的吞吐量.
流水线特点:
0--流水线定义
1--多条指令同时执行
2--每一个段只执行一条指令的一部分
3--指令沿着流水线流动一次的时间间隔就是一个机器周期(因此最慢的段决定了cycle大小)
流水线瓶颈:时间最长的段
流水线的五个阶段:
IF(取指令)->ID(指令译码/取寄存器[针对分支转移指令])->EX(执行/有效地址计算)->MEM(存储器访问load或store)->WB(写到寄存器,如load或者ALU的计算结果),以RISC为例,每条指令长度4字节,每条指令执行时间至少是5 cycles

流水线的通过时间: 从任务开始到稳定工作状态(段被填满)所需要的时间
流水线的排空时间:从稳定工作状态结束到最终任务结果所需要的时间

stall时发生了什么?
1--Instructions issued later than this instruction are stalled(在stall指令后的全都得一起stall)
2--Instructions issued earlier than this instruction must continue(在前的必须continue)
流水线的三个冲突:
1--结构冲突: 因硬件资源竞争引起的冲突


- (使用Stall解决结构冲突)
- (通过增加硬件解决结构冲突 比如指令cache和数据cache分离的方法(上图结构冲突由于两个指令同时需要访问cache引起,load读数据,I3取指令)
2--数据冲突: 指令在数据流中重叠执行时需要用到前面指令的结果产生的冲突


- (使用Stall解决数据冲突)
- (使用旁路技术解决数据冲突) [定向技术:使用流水线寄存器组直接向后面的指令传递结果]
定向技术检测冲突的方法是: 当硬件检测到前面某条指令的结果寄存器就是当前指令的源寄存器时,控制逻辑会将前面那条指令的结果直接从其产生的地方前递到当前指令所需的位置。定向技术的实际硬件结构如下所示

注意:
load指令和其他ALU指令不同,在使用定向(解决load和其后指令的冲突)时仍有可能冲突(因为load必须得等到mem段才能得到真正的数据,其他的ALU指令可能在Ex阶段就能算出结果,load必须访存),如下,这时候需要旁路+Stall 一起用
- 旁路技术检测冲突在load指令RAW中的应用:在当前指令的ID段检测数据相关,可以看出只需要把load指令的结果寄存器(lw的MEM段寄存器)与load指令后的几条指令(包含当前指令sub)的(ID段)源寄存器地址进行比较,如果在同一级(如lw与and)则可以用旁路或者在后面(如lw与or)则无需操作(因为前半周期写后半周期读),如果在前面(如lw与sub)则需要stall
- 如果在指令中观察,则Lw的下一条指令只能stall+forward,下二条指令可以forward,下三条指令无需操作(无冲突)如下图所示
做系统结构实验的时候找到一个trick:
一般在有定向技术的情况下找RAW冲突,只需关注两条连续的指令中第一条是LW的(类似上图第二个),这种只能stall,如果两条连续指令中第一条不是LW,则可以通过定向解决,比如:
ADD r1 r1 r3
SW r1 0(r2)
ADD写r1 SW读r1 但是ADD的EX结果可以直接传给SW的EX(如果定向机构检测到前一个ALU的计算结果写入的寄存器【对应r1】就是当前ALU的源寄存器,那么控制逻辑就选择定向的数据作为ALU的输入,而不采用从通用寄存器组读出的数据)
截图(以后补,用MIPS的模拟器)



上面举例的都是RAW,另外还有WAR和WAW冲突(但是在MIPS中也就是五段流水线里只会出现RAW):



3--控制冲突: 流水线遇到分支指令或者其他改变PC值的指令所遇到的冲突


有两个解决思路:1-更早得决定branch是否该被选中(MIPS在ID段zero test) 2-更早得计算好分支转移的地址(MIPS在ID段算转移PC)
(如上右图将分支地址计算放在了ID阶段,MIPS中的branch test都是通过检测register的值是否为0,因此把zero test也一起移动到ID段(如前所示,Id段可以读寄存器)这样一旦决定转移分支就不用等到10指令的MEm走完)这样只需一个stall(若跳转,36的IF需要等10的ID出结果),相比之前的三个stall(若跳转,36的IF需要等10的MEM出结果),减少了penalty,具体如下图所示。

减少分支延迟(控制冲突)的四种方法总结:
(2,3统称为分支预测,是一种静态预测,【下一章会有动态分支预测,这里静态是指预测操作是预先订好的,一定成功或者一定失败,动态则是可以根据之前的分支实际执行情况动态选择本次分支是成功还是失败】):
- stall一直到mem段出结果
- 假设分支一定not taken(也就是不跳转,接着执行下面一条指令),如果真实结果是跳转则squash(挤压,可以理解为指令作废,就是上面的idle)
- 假设分支一定 taken,同样需要一个stall等ID出转移地址结果,在五段流水线中,如果最后not taken,还需要转回到i+1,需要寄存器存i+1地址,相比方法2完全没有好处
- 延迟分支,使用编译器进行指令静态调度(调到延迟槽中)【下一章会有指令动态调度】,MIPS用的是只有一条指令的延迟槽,这种方法和2实际上几乎没区别的,只不过槽里那条指令不会被squash,也可以不是i+1(填充盐池槽的指令选择如下二图所示)


几种方法的共同特点:都属于静态方法,对分支的处理方式在程序执行过程中固定不变,要么总是预测成功,要么总是预测失败。
延迟分支几种调度策略和优缺点:

注意:
对于分支预测,无论是静态方法还是动态方法都是硬件和软件共同作用的结果!静态是说预测是提前预定好的,动态可以自我调整
对于调度,静态是指通过编译器在编译阶段进行的调度,动态是指通过硬件在执行过程中进行的调度
三种冲突的解决方法总结:

流水线性能指标:


例题1:


加速比(一定大于1):

效率:




带有stall的流水线性能:
(比如:CPI,如果流水线无stall那么cpi一定是1,因为每个时钟周期流出一条指令)

例题2:
加速比除了用总时间比值也可以用平均时间(=时钟周期*平均CPI)的比值来计算
假设非流水线实现的时钟周期时间为1ns,ALU和分支指令需要4个时钟周期,访问存储器指令需5个时钟周期,
上述指令在程序中出现的相对频率分别是:40%、20%和40%。
在基本的流水线中,假设由于时钟扭曲和寄存器建立延迟等原因,流水线要在其时钟周期时间上附加0.2ns的额外开销。
现忽略任何其他延迟因素的影响,请问:相对于非流水实现而言,基本的流水线执行指令的加速比是多少?



Chapter 5 ILP - 1
nWhat is Instruction-Level Parallelism (ILP) and the 2 approaches to exploit ILP * 指令级并行,静态与动态
nWhat is Basic Block * 基本块
nData Dependence (True dependence), Name Dependence (Anti-dependence, Output dependence) , Control Dependencies * 相关(与冲突的关系)
nUnrolled Loop and Minimizes Stalls * 循环展开
nDynamic Branch Prediction * 动态分支预测
- qBranch History Table, Correlated Branch Prediction, Tournament Predictors,Branch Target Buffers 分支目标缓冲 *
什么是ILP?提高ILP的两种方法?
当指令之间不存在相关,他们在流水线中可以重叠起来并行执行,这种潜在的并行性称为指令级并行。
重叠执行指令以提高性能,两种方法:动态方法(改变硬件)软件方法(编译器调度)

什么是BB?
除入口和出口外没有其他分支(branch)的线性指令序列,BB内部的指令可能相互依赖(dependent),所以开发ILP更多是在BB之间。
比如循环级并行(loop-level parallelism):
- for (i=1; i<=1000; i=i+1)
- x[i] = x[i] + s //(一个循环中的不同循环体并行执行)
其中每个循环体就是一个BB,共有1000个BB,ILP就是使得这1000个BB能并行计算,这个具体方法叫循环展开(unrolling loop)。
- 动态循环展开:动态分支预测(上一章的分支预测是一种静态的)
- 静态循环展开:编译器静态调度指令(后面还会介绍一种动态调度)
相关与冲突的关系
相关:两条指令之间存在某种依赖关系
冲突:在具体流水线中,由于相关的存在,使得指令流中下一条指令不能在指定的时钟周期开始执行
两者之间的关系:
相关性是程序的固有属性; 冲突是流水线的特性;
相关性的存在只预示着存在有冲突的可能性。
相关的分类
数据相关:后面的指令使用了前面指令的结果
一般都是能引起RAW冲突的相关

ILP的宗旨就是只在会影响结果的时候保留指令执行顺序,其他情况下尽可能改变顺序提高并行性

名相关:两条指令使用相同的寄存器名,而两者之间没有数据流动
包括反相关,一般都是能引起WAR冲突的

和输出相关,一般都是能引起WAW冲突的

反相关的解决方法:一般可以通过寄存器重命名,也可以编译器静态调度和硬件方法。
控制相关:由分支指令引起的相关
一般都是能引起控制冲突的相关

上图红字的意思是: 指令调度的时候不能跨越分支指令,也就是BNE之前的指令不能调度到BNe之后(一个特例是分支延迟中可以放在BNE的延迟槽,见后)
循环展开:




1 由上可见,BB内的指令调度能带来的ILP提升有限(虽然减少了总的cycles,但是其中真正想执行的指令只占3/7,剩下的四个都是为了分支转移)
2 同时右图中DADDUI之所以能插到L和ADD之间的stall中是因为他和L,ADD均不存在冲突!(可能有人会想他可能与L有WAR,实际上MIPS的五段流水线是不可能产生除了RAW之外的数据冲突的,原因见前,就算想冲突,L和DADDUI之间也得起码隔着两个拍才行(这样L的mem才能和DADDUI的ID冲突上))
3 此外还可以将BNE移动到S之前的一个stall中,此时S处于BNE的延迟槽中,不属于(S)跨越分支指令(BNE)的情况
由1 启发我们需要在BB之间进行调度,这种就是循环展开要做的:


重要!->总循环次数n=1000,假设每次循环展开成k=4个(如上左图所示,减少了循环控制和分支开销)然后进行寄存器重命名(避免冲突)和指令调度(如上右图所示,减少了空转周期提高效率)
实际上是先进行n mod k个loop,然后再展开成k个的大loop,对这个大loop再循环n/k次,n越大,就会有越多的时间花在循环展开后的大loop上
循环展开的优点和限制:
限制:
- 循环展开成大loop时,若k过大,指令cache的miss rate会增加
- 因为用到了重命名,寄存器可能不够
优点:
- 降低整体开销(通过二外的循环展开)
- 减少了branch的开销
动态分支预测:
动态相比静态的区别是使用从早期运行(earlier run)中收集的概要信息预测分支,并根据上次运行(last run)修改预测
branch history table
1-bit的BHT存在的问题:
- 最后一次预测错误不可避免,因为前面分支总是成功
- 第一次预测错误是源于上次程序的执行,因为上一次程序最后一次分支不成功(可通过2-bit解决,见下图)

Correlated Branch Prediction

2-bit的BHT存在的问题:
- 如果不止一个分支(branch)存在,前面的分支可能会影响后面的分支(称为相关分支,见下左图,只有b1 b2都是Not Taken,b3才能Taken)可以通过相关分支预测器解决(见下右图)


注意:2-bitBHT相当于(0,2)的相关分支预测器
例题:
一个(2,2)的分支预测器如下:求预测结果

上图中address是不同分支的地址,GBH记录了上一次run的时候两个相关分支的taken情况,根据add和GBH定位到对应的具体状态为01,则说明这次run的预测是Not Taken
Tournament Predictors

其中selector 长得类似(0,2)的predictor:


Branch Target Buffers
BTB的思想借鉴了指令cache,他是预先把已知的是branch的指令地址和预测地址都存起来,然后将当前PC值逐一与表中的指令地址比较,若相等则说明当前PC指向的指令是一条分支指令,此后系统不再抓取PC对应的指令而是fetch与之对应的predicted PC指向的指令,如下图所示:


以下部分为Part2 请转链接:
Chapter 5 ILP - 2
nBranch Target Buffers 分支目标缓冲 *
nConcept and Advantages of Dynamic Scheduling * 动态调度
- qScoreboard 记分牌
- qTomasulo
- qSpeculation 前瞻执行
- qTomasulo with ReOrder Buffer 再定序缓冲
nSuperscalar and VLIW * 超标量与超长指令字
Chapter 6 Limits to ILP and SMT
nWhat are Limits to ILP
nWhat is instruction window? 指令窗口
nWhat is Thread Level Parallelism (TLP) or MultiThreading * 线程级并行,多线程
nWhat is Data Level Parallelism? 数据级并行
How to switch Multi Threads **
- qfine grain 细粒度切换
- qcoarse grain 粗粒度切换
nWhat is Simultaneous multithreading * 同时多线程
nKnow something about Power5
Chapter 7 Memory Hierarchy - 1
nLevels of the Memory Hierarchy * 存储系统的层次结构
nThe Principle of Locality: Temporal Locality and Spatial Locality * 局部性原理
nWhere can a block be placed: Fully associative, direct mapped, n-way set associative * 映像规则
nHow is a block found in the upper level? 查找算法
nWhich block should be replaced on a miss? 替换算法:Random、LRU、FIFO
nWrite Policy: Write-Through and Write-Back; Write allocate and No-write allocate * 写策略:写直达与写回,按写分配与不按写分配
nWhat and Why a write buffer 写缓存
Chapter 7 Memory Hierarchy - 2
nCache Measures: Average memory-access time ** Cache性能:平均访问时间,命中与失效
- q= Hit time + Miss rate x Miss penalty *
- q= Hit timeL1+ Miss rateL1x (Hit timeL2+ Miss rateL2x Miss penaltyL2)
nBasic Cache Optimizations
nThree Major Categories of Cache Misses: Compulsory, Capacity and Conflict * 强制、容量与冲突不命中
nWhat is virtual address space 虚存空间
nHow page table works 页表
nTranslation Look-Aside Buffer (TLB)地址变换后备缓存
Chapter 8 I/O Systems
nWhat is a bus? Types of Buses
nDisk Drive Performance
nReliability, Availability and Dependability of the Storage Device * 可靠性、可用性与可信性
- qMTTF, MTTR and MTBF
nRedundant Arrays of Inexpensive Disks (RAID): Type, Characteristics and Read/Write Algorithm ** 廉价磁盘冗余阵列
nI/O Benchmarks: Metrics and TPC
Chapter 9 Vector Computers
nWhy Vector Computers? * 冲突在哪里?
nVector Programming Model and SIMD extensions *
nHow Vector Processors Work: deep pipeline and multiple independent memory banks
nWhat is Vector Strip-mining 分段开采技术
nWhat is Vector Stride 向量跨距/步长
nEnhancing Vector Performance Methods
- qChaining, Conditionally Executed Statements, Sparse Matrices, Multiple Lanes, Pipelined Instruction Start-Up
nPerformance of Vector Processors
- qConvoy and Chime
Chapter 10 Multiprocessor - 1
nClassifications of Computers (IEEE) * 计算机分类
nFlynn’s Taxonomy * Flynn分类法
nMulti-processors & Multi-computers *多处理机与多计算机
nWhat is Computer cluster, SMP, MPP? * 机群、对称式共享存储多处理机、大规模并行处理机
Chapter 10 Multiprocessor - 2
nFlynn-Johnson classification **
n2 classes of multiprocessors with respect to memory: *
- qCentralized Memory Multiprocessor 集中式存储器
- qPhysically Distributed-Memory Multiprocessor 分布式存储器
n2 Models for Communication: *
- qmessage-passing 消息传递
- qShared memory 共享存储
nChallenges of Parallel Processing ** 计算
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

