
热门标签
热门文章
- 1MTCNN详细解读
- 2一些语音特征--学习笔记_语音 预加重 分帧 加窗 fft
- 3自动化脚本-Excel批量生成二维码
- 4AI写作 | 对Chatgpt用哪些提示方式才能让它写一篇优秀的小红书笔记?_chatgpt 角色扮演提示词 小红书
- 5Widgets基础篇(上)_wigetsmifh
- 6Python学习笔记---(2)Python环境的搭建_用python 将 x = "我的身 是:",y=180 请将x跟y拼接到 起
- 7校园跑腿微信小程序,校园跑腿小程序,微信小程序跑腿系统毕设作品_校园跑腿小程序设计
- 8Arcgis中创建Python脚本工具_arcgis如何运行python脚本
- 9xcode 第二个模拟器无法安装_xcode 模拟器下载后无法安装
- 10《花雕学AI》ChatGPT 的 Prompt 用法,不是随便写就行的,这 13 种才是最有效的_chatgpt prompt 写作
当前位置: article > 正文
【GA三维路径规划】遗传算法无人机三维航迹规划【含Matlab源码 2582期】_matlab遗传算法飞行
作者:盐析白兔 | 2024-03-28 17:52:55
赞
踩
matlab遗传算法飞行

⛄一、无人机简介
0 引言
随着现代技术的发展,飞行器种类不断变多,应用也日趋专一化、完善化,如专门用作植保的大疆PS-X625无人机,用作街景拍摄与监控巡察的宝鸡行翼航空科技的X8无人机,以及用作水下救援的白鲨MIX水下无人机等,决定飞行器性能主要是内部的飞控系统和外部的路径规划问题。就路径问题而言,在具体实施任务时仅靠操作员手中的遥控器控制无人飞行器执行相应的工作,可能会对操作员心理以及技术提出极高的要求,为了避免个人操作失误,进而造成飞行器损坏的危险,一种解决问题的方法就是对飞行器进行航迹规划。
飞行器的测量精度,航迹路径的合理规划,飞行器工作时的稳定性、安全性等这些变化对飞行器的综合控制系统要求越来越高。无人机航路规划是为了保证无人机完成特定的飞行任务,并且能够在完成任务的过程中躲避各种障碍、威胁区域而设计出最优航迹路线的问题。
1 常见的航迹规划算法
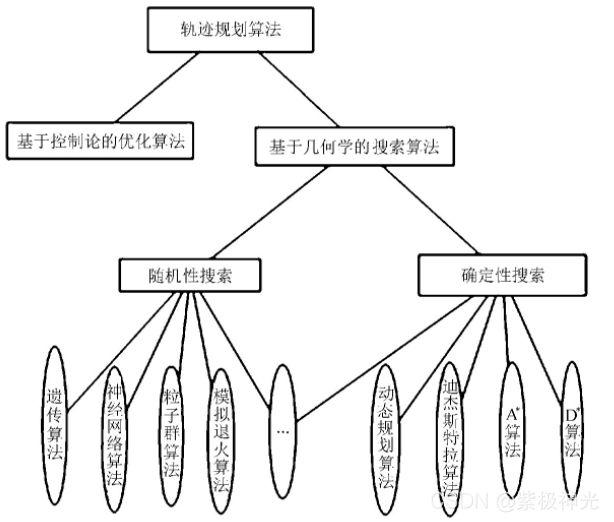
图1 常见路径规划算法
文中主要对无人机巡航阶段的航迹规划进行研究,假设无人机在飞行中维持高度与速度不变
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/330365
推荐阅读
相关标签

