
- 1tsconfig.js配置属性含义-编译上下文_allowjs": true是开启什么
- 2软件系统质量属性_2.面向架构评估的质量属性
- 3基于opencv和python的人脸识别签到系统设计与实现_python课堂签到系统
- 4MySQL8.0安装教程
- 5【opencv】示例-detect_mser.cpp 使用 MSER 算法来检测图像中的极值区域
- 6猫头虎分享:什么是Promise异步编程
- 7学深度学习的实现路径_小学数学深度学习认识及实践路径
- 8建议收藏:超详细ChatGPT(GPT 4.0)论文润色指南+最全提示词咒语_chat gpt 润色论文
- 9基于预训练模型 ERNIE-Gram 实现语义匹配-数据预处理_预训练语言模型 语义匹配
- 10书写高质量代码之状态维护_生命周期函数不进行实际业务代码书写
【论文解读】手术机器人系统的工作原理分析与解读_手术机器人的安全控制框架
赞
踩
A Fully Sensorized Cooperative Robotic System for Surgical Interventions
一种基于NDI导航和协作机械臂定位的手术机器人系统,虽说这是一篇2012年的论文,但是这个领域目前可以说是最近的风口了,不做深究,但是特此学习一下。
摘要
在这项研究中,提出了一种用于针操作的完全传感协作机器人系统。该设置包括专为安全人机交互而设计的DLR / KUKA轻型机器人III,FD-CT机器人驱动的血管造影C型臂系统和导航摄像机。此外,还介绍了用于临床环境中机器人操纵的新控制策略。提出了一种对相关组件进行快速校准的方法,并对整个可能的误差链进行了初步的精度测试。使用导航系统对机器人进行的校准具有0.81 mm(rms)的残留误差,标准偏差为±0.41 mm。以工作空间内不同位置的固定点为目标的机器人系统的精度为1.2 mm(rms),标准偏差为±0.4 mm。校准后,由于闭环控制,绝对定位精度降低到导航摄像机的精度,即0.35 mm(rms)。所实现的控制使机器人可以补偿患者的小动作。
Introduction
外科机器人是一个不断发展的领域,历史相对较短。第一次有记录的医疗应用发生在1985年,在那里进行了脑活检[1]。外科机器人是一个跨学科的领域,其中许多组成部分相互交流。其中包括电机、齿轮和各种传感器等机电设备。手术机器人有很大的潜力改善病人护理[2]。他们比人类有一定的优势**,例如,他们没有20赫兹颤音或(人类固有的)**,可以更精确地遵循平滑的轨迹。在医生接近辐射的手术中,使用机器人系统有助于避免暴露。
根据定义,外科医生是手工。他用双手用手术刀和剪刀切割纸巾,用手锯剪骨头,介绍螺丝,用线和线缝等。为了用机器人系统执行这些活动,它必须特别装备大量的内部和外部传感器。传感器技术在现代手术室中非常重要,在未来的手术室中至关重要[2]。由于使用各种传感器,手术机器人系统是可能的。与自动化行业部署的机器人(机器人组件与人类隔离)不同,手术机器人直接对患者器官施加力[3]。设计一个能够直接接触、压压和切割脆弱和重要器官的机器人,会解决一些问题。这些问题减缓了这一非常有希望的领域的实践。
尽管与手术机器人有关的所有挑战,也有一些成功的系统,有FDA的接受,是商业可用性能够[4,5]。例如,DaVinci机器人(美国加利福尼亚州桑尼维尔的直觉外科公司)[4]是市场渗透率最高的系统,因为已经售出了超过1933台。其设计使外科医生在通过身体的小切口时提高了灵巧性。该系统包括一个驾驶舱,外科医生使用触觉设备远程操作机器人,一个带四臂的推车(其中三只手臂,根据任务的不同,可能有钳子,剪刀,拿着手术刀,另一只手臂拿着一个拉皮镜)和图像处理设备。另一个成功的手术机器人是CyberKnife®(美国加利福尼亚州桑尼维尔的Acuray公司)[5]。该系统有能力非常精确地照射肿瘤,即使患者解剖因呼吸而移动[6]。这种方法的主要思想是避免损害肿瘤周围的健康组织。该系统包括一个线性加速器,安装在六个自由度的机械臂的手腕上。机器人系统的任务是精确地将线性加速器对肿瘤进行定位。对于视觉,该系统使用两个配备平板探测器的正交X射线摄像机。为了提高准确性,该系统包括一个用于实时患者跟踪的导航系统。达芬奇和CyberKnife系统都使用各种传感器来执行任务。
分析一些成功的手术机器人系统,可以发现它们是使用不同技术水平的孤立努力。专家们认识到 ,尽管许多解决方案试图在临床环境中引入自动化,但它离行业实现的标准化水平还很远。标准化是外科机器人发展的关键 [2]。(医疗伦理相关)
机器人的机械部分使用特殊的传感器不仅可以测量末端执行器的位置,还可以沿其运动学测量位置。 用于测量位置及其派生值的最常用技术是旋转变压器,带有霍尔传感器的光学编码器和磁性编码器。 感应技术为能够与不断变化的环境进行交互的机器人系统的开发打开了大门。 Hirzinger(德国航空航天中心机器人与机电研究所)开发了一种机器人系统,用于与人类进行安全交互[7]。 这些系统强大的顺应性控制使用户可以用手拉动或推动机械臂,并且系统将像没有重量一样运动。 这种控制方式通常称为“软机器人”或“动手机器人”。 MiroSurge系统使用类似的控制方案,被设计用于微创外科手术[8]。
机器人辅助的主要优点是在手术过程中增强或伸展外科医生的手和眼睛。对于不熟悉机器人的用户来说,控制手术机器人系统必须简单直观。因此,在开发一个外科机器人时,一个适当的人机界面是必不可少的。触觉一词在机器人中被定义为机器人、人类与真实、远程或模拟环境之间的真实和模拟触摸交互[9]。例如,Da-Vinci 系统利用触觉设备直观地操作机器人 [4]。其他手术系统使用操纵杆 [10] 和触觉设备,如幻影 Omni 设备(可感性技术公司,威尔明顿,美国 加利福尼亚州)
外科机器人发展的一个基本部分是它能够 可视化手术区域。在实时方法中对可视化传感模式进行分类非常有用,这些方法提供感兴趣的区域的连续可视化,以及通常用于术前诊断和规划的非实时方法 [11]。
常用的实时传感方式是内窥镜、超声波、荧光镜和光学相干断层扫描 (OCT)。内窥镜是可视化最成功的方法。它们通常用于微创手术 [5,12]。不幸的是,他们不能从组织内部提供进一步的信息。相比之下,超声波从组织内部提供2D实时图片,但只有熟练的 临床医生才能正确使用这种技术。Fluoro光谱是一种提供高空间分辨率的技术,可以解析亚毫米大小的物体。其 2D 图像清楚地显示不同材料(如骨骼和 肝脏)与不同组织密度(如心脏和肺)之间的对比度[13]。荧光镜的最大限制是覆盖结构都减少到一个图像 平面。
手术机器人中部署的最重要的非实时可视化 系统是 X 射线、计算机断层扫描 (CT)、磁共振 (MR) 和正电子发射断层扫描 (PET)。先前的工作是使用CT(例如,ROBODOC和CASPAR系统[14,15])完成的,用于完全臀部和膝盖的置换。X射线技术被 用于网络刀系统对目标位置进行本地化。MR 是提供最精确组织分化的成像技术。最近, 由 非金属部件制成的专门设计的机器人可与 MR [16] 一起使用。
FD-CT 是一种将荧光(实时)和 CT(非实时)结合在单个设备中的技术,由配备平板探测器的 C 臂组成。与 X 射线胶片和图像增强器相比,FD 技术可提供更高的动态范围、减少数据、快速的数字读出,同时保持紧凑的设计 [17]。尽管 FD-CT 提供比普通 CT 更高的空间分辨率,但它包含一些缺点,例如视野较小和时态分辨率较低 [17]。然而,FD-CT已经证明在规划和术中手术中独一无二[18[20]。C-臂的特点是灵活性和易用性;特别是,通过选择任意的角化的可能性。
将机器人系统与成像设备一起使用的障碍之一是,后期的龙门尺寸不够大,不足以同时存储一些机器人的患者和运动学[21]。许多碰撞问题产生于这些设置,这是许多耳塞已经建立了小型专用机器人系统,以适应剩余的地方的原因之一。一个新的FD-CT系统(德国柏林工业公司,西门子医疗公司)采用机器人手臂(德国格斯特霍芬的库卡机器人),提高运动灵活性[17,22]。该系统可用于灵活的术中成像,并可与其他机器人系统协调,以帮助外科医生。
除了编码器和成像设备作为传感模式外,还研究了本地化器,以分析其适合外科机器人应用的 bene[23,24]。这些设备跟踪仪器相对于患者解剖的位置。仪器可能是机械臂的手术工具。在 CyberKnife 系统中,部署了光学定位器来固定容易因呼吸而移动的患者的位置[5]。
在这项工作中,提出了一个完全传感器化的机器人手术系统的概念和实现。拟议的系统利用了手术机器人手术中采用的各种概念,如触觉、软机器人、可视化和外部跟踪。手术系统由两个协调的机械臂组成。前者执行手术任务,另一个提供精确的目标可视化。该系统经过改造,通常将针头插入解剖,以便提取组织样本作进一步分析或注射药物进行治疗。作者着重介绍了系统中采用的传感器技术。除了医疗环境中通常采用的传统标准外,该系统还利用了自动化行业的标准。
Materials and Methods
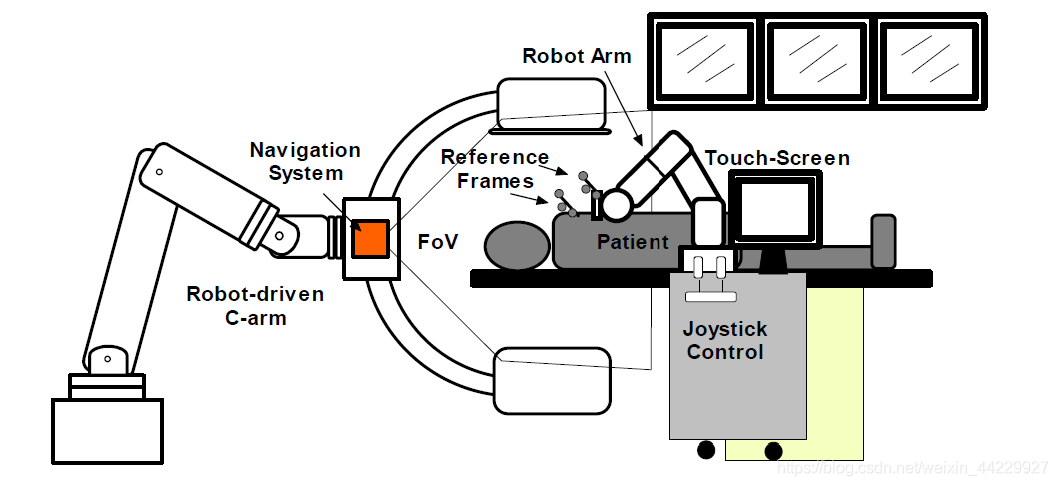
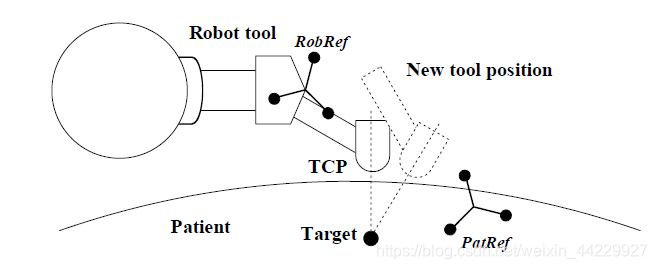
在图1中,显示了主要系统组件的表示。为了插入针头,使用了串行机器人系统。它的腕部装有特殊的持针器。该机制允许临床医生手动插入针头。机器人系统包括一个实时控制器(来自制造商)和一个应用程序控制器。它的设计旨在通过触摸屏和工业操纵杆进行手动控制。为了将机器人系统轻松地沿着CT工作台放置,所有组件都安装在移动手推车上。以这种方式,可以容易地将系统定位于患者床并从患者床移除。为了进行目标可视化,部署了配备平板探测器的机器人驱动的血管造影系统。这种特殊的C形臂可以沿着手术台放置,提供全身覆盖。与仅绕固定位置旋转的常规C臂相反,该成像系统可以进行调整以扫描具有不同角度和凸形轨迹的解剖目标。进行扫描后,它将重建的3D图像发送到应用程序控制器进行规划。此外,二维投影可用于获得实时目标可视化。根据图像,外科医生可以选择目标和合适的进入点。该系统的另一个重要部分是一个光学定位器,该光学定位器借助安装在持针器上的参考镜架精确跟踪针的位置。此外,它还通过附在其上的参考框架跟踪患者的位置。
- 图1.为皮下手术绘制完全集成的系统草图
插入针头时的自然触觉反馈会通过轨迹从周围组织的特征中提供重要信息。 在这些特征中,可以获得不均匀的韧性和组织弹性的反馈感觉。 因此,决定只使用机械手来定位和定向针。 一旦机器人达到所需的针方向,外科医生的任务就是小心地插入针。 这样,可以将控制手术的临床医生的经验考虑在内。 图2显示了介入套件中的主要系统组件。 血管造影系统(Artis zeego,西门子医疗)包括一个串行机器人(KUKA机器人),其腕部装有C形臂。
- 图2. 介入套件中的系统设置

流程
大多数自动机针放置设置都利用Masamune等人介绍的工作流程。 [25]。尽管我们的系统的工作流程相似,但有一些创新之处。其中之一就是所谓的目标枢转,它可以在固定目标时灵活地更改插入点。对于通常使用Masamune引入的工作流程的RCM机器人,这种方法是不可能的。建议的工作流程将在以下步骤中进行描述:
- 准备:根据[26]中所述的步骤,将患者固定在CT台上,并固定患者图像配准设备。
- 成像:使用血管造影C臂进行3D扫描。重建的CT图像立即传输到导航服。
- 计划:图像在触摸屏显示器上显示后,临床医生将定义进入点和目标点。
- 交互式定位:将机器人手推车放在患者旁边。然后,临床医生用手握住机器人,激活交互式定位控件(将在下一个2.3节中进行介绍),然后移动机器人手臂,直到工具尖端位于入口点上方。
- 自动定位:一旦临床医生激活了死人开关,机器人就会将持针器对准计划的目标。
- 重新定位(远程操作模式):如果需要,可以使用操纵杆使用目标枢转选项来更改入口点。在此过程中,针头轨迹会连续显示在3D图像中。
- 插入针头:临床医生以机器人的持针器为指导手动插入针头。可以使用荧光透视检查或全3D CT扫描进行确认扫描。
- 干预或治疗:一旦针头击中目标,就可以获取组织样本,或者在消融的情况下进行治疗。
机器人控制模式
如工作流 所示,机器人系统有三种不同的控制策略:
- 互动模式:机器人手臂在笛卡尔空间的所有方向(重力补偿控制) 上是自由机动的,好像没有重量。通过挑选机器人手柄,按顺序按下连接到它上的两个按钮,激活交互式模式。也可以通过推来改变机器人的肘部位置。
- 图像引导模式 :机器人根据导航系统测量 的基于患者 的特定规划移动。
- 远程操作模式:用户在 TCP(工具中心点)坐标中用操纵手柄控制机械手臂。可调整进入角度,同时针架不断指向目标。这是相当有用的,因为用户可以观看新的3D图像,并选择最方便的一个。
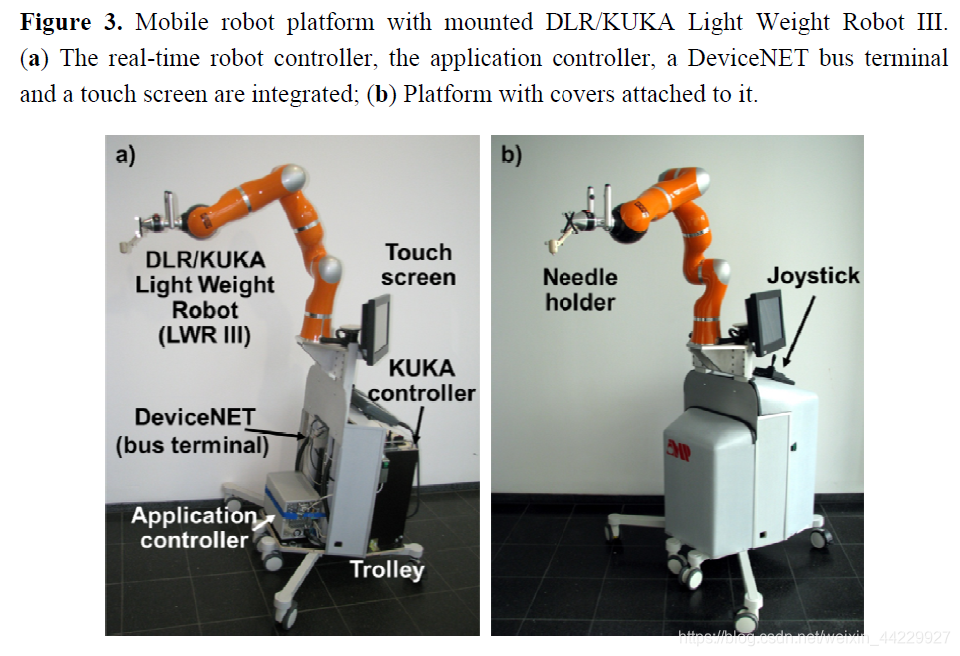
机器人台车
如前所述,针头插入机器人连同其制造商控制器和该应用程序的专用控制器一起安装在移动手推车上(图3)。手推车可以放置在手术台附近,从而可以在不干扰C形臂轨迹的情况下将机械臂放置在患者附近。为了直观地做到这一点,机器人具有特殊的控制模式。针头插入机器人是第三代DLR / KUKA轻型机器人(LWR III)[7],专门设计用于安全的人机交互。由于该机器人具有碳纤维罩和铝制骨架,因此重量仅为14 Kg。所有传感器(包括编码器,保险杠等),电机控制器和电缆都集成在手臂中,这使得该机器人非常适合在市长关注的拥挤环境中进行操作。该机器人有七个旋转关节;相比6 d.o.f.机器人,其附加关节可在不影响机器人工具姿势的情况下改变肘部位置。在机器人的每个关节中,扭矩传感器都测量施加的力。这种设置的市长优势之一是可以在所谓的重力补偿模式下使用机器人。在这种控制模式下,可以通过几乎没有阻力的手抓住机器人来移动机器人手臂[27]。一旦用户停止(在其结构的任何部分上)拉动或推动它,它就会停留在其位置,等待下一次运动。它看起来很像是太空船内部的一个不存在重力的物体。如果控制模式的某些参数如虚拟重量,摩擦和弹力(可以改变补偿模式的行为)是必须改变的,制造商控制器的编程接口可以执行此操作。在移动平台的底部安装了制造商实时控制器(KRC,KUKA机器人控制器)和应用程序控制器。 为了安全起见,将不同的传感器连接到手推车内部框架,这将在控制系统部分中进行说明。
握把和针刀刀架
带有两个把手的手柄连接到机器人的手腕上,便于用户操作。 使用两个手柄的想法是,用户可以从患者床的两侧拿起它。 每个手柄都有两个按钮,一个在顶部,另一个在内侧(图4(a))。 通过按下按钮,可以激活重力补偿模式。 出于安全原因,只有在同时按下两个按钮(上一个用拇指和下一个用食指)时才能启用此交互模式。 万一医疗应用需要其他工具,则在手柄末端安装了一个被动式工具更换器(GRIP GmbH Handhabungstechnik,德国多特蒙德)。 从图4(a)可以看出,从被动式工具更换器开始,机器人可以用消毒的盖布覆盖,以保护机器人免受患者血液和其他液体的侵害。
- 图4. (a) 机器人手柄与针架一起。DRF 附加到工具,以便导航系统跟踪;(b) 该工具是可自动回收的。米色共洛尔部件由PEEK组成,以确保无伪影成像。
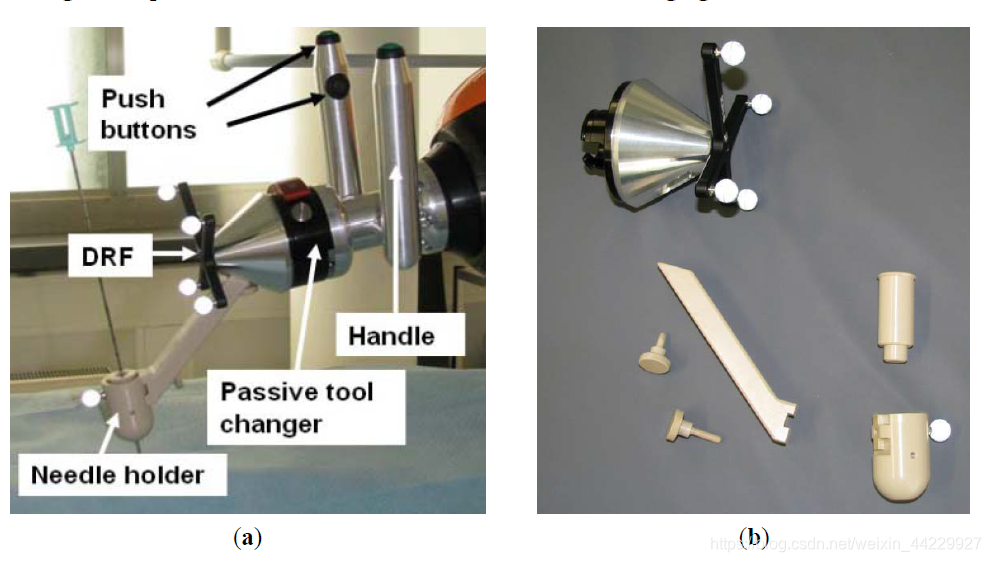
为了使用光学定位器跟踪针头,将动态参考框架(DRF)连接到针头支架(图4(a))。 携带针头的装置是放在工具正面的米色片。 它完全由PEEK制成,以确保生物相容性。 另外,它的特性使该材料伪像在CT图像中不存在。 持针器可以执行不同的插入操作,以支持变化的针或工具直径。
控制系统
如前所述,KUKA / DLR LWR III是串行机器人。 这类机器人具有出色的可重复性,但由于运动学上的微小误差或随时间增加的校准错误,其绝对定位精度并不出色。 当向机器人发出差动命令时,这些误差的影响较小,这意味着机器人应相对于其上一个位置而不是绝对位置进行移动。 基于此假设,本方法包括定位TCP位置(工具中心点)并以实际位置为原点进行小的移动。(As mentioned before, the KUKA/DLR LWR III is a serial robot. These kinds of robots have excellent repeatability but their absolute positioning accuracy is not outstanding due to small inaccuracies in their kinematics or calibration mistakes that increase over time. These inaccuracies have less impact when differential motions commands are given to the robot, meaning that the robot should move in relation to its last position instead of the absolute position. Based on this assumption, the present approach consists on locating the TCP position (Tool Center Point) and performing small movements taking the actual position as the origin.)这段好要好好理解!
应用控制器
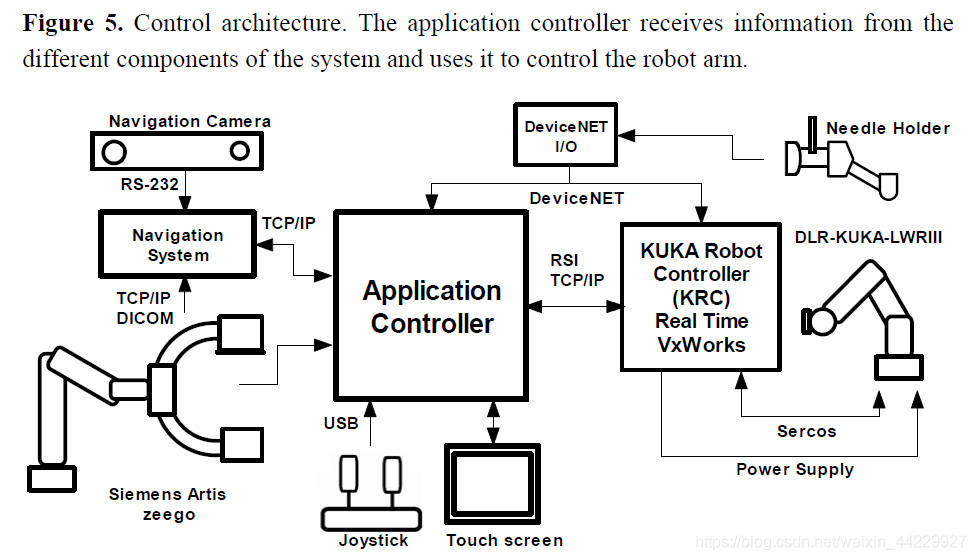
应用程序控制器的主要任务是集中来自所有系统组件的数据,处理该信息并发送由执行器执行的命令。 应用控制器从实时控制器(机器人姿势和力的测量),光学定位器(参考系的位置和方向),机器人驱动的血管造影系统(2D投影和3D图像重建),触摸屏( 用户计划说明)和操纵杆(用户命令移动)。 作者在以Windows XP为操作系统的裸机中实现了该控制器。 图5概述了系统组件及其与应用程序控制器的通信协议。
- 图5. 控制体系结构。应用控制器从系统的不同组件接收信息,并用它来控制机械手臂
应用程序控制器具有状态机,该状态机根据实际状态和来自系统组件的数据信息来触发。 这些转换的示例如下:用户在触摸屏中引入命令,准备使用图像,激活交互式控件,来自KRC的安全相关数据已到达等。机器人内部安全相关的功能(例如速度) 局限性,力的监控由KCR实时处理。 外部安全相关的紧急按钮和激活按钮(来自手柄)通过DeviceNet链接连接到KCR和应用程序控制器。
*机器人传感器接口
机器人姿态和运动命令的动态数据通过**KUKA机器人传感器接口(RSI)**周期性地交换[28,29]。 RSI实时接口是机器人制造商提供的用于将传感器耦合到其控制器的解决方案。数据通信的基本机制收集在RSI中,RSI是模块化结构并嵌入到KUKA编程环境中。它支持基于工业通信标准(现场总线,以太网)的同步和异步数据传输。在这项研究中,传感器(在本例中为光学定位器)与机器人之间的数据交换是使用XML消息完成的。使用预定义的功能模块(即数字滤波器,转换,控制算法)在KUKA控制器的实时内核中处理传感器数据,这些模块组合在由大约100个不同模块组成的传感器功能库中。可以在一个笛卡尔运动插补(12 ms)的一个周期内执行处理任务,从而使传感器信号可以在运动过程中影响机器人的位置。
建立了从KCR到应用程序控制器的TCP / IP链接,以便传输XML数据。在KRC的每个插补周期中,包含实际机器人位置,关节角度,测得的轴力和电动机电流的XML数据包都将发送到应用程序控制器。基于此数据,应用程序控制器计算XML数据包,其中包括TCP的校正向量。 KRC仅在收到的包裹在同一时隙内到达时才对其进行处理。
*流程图
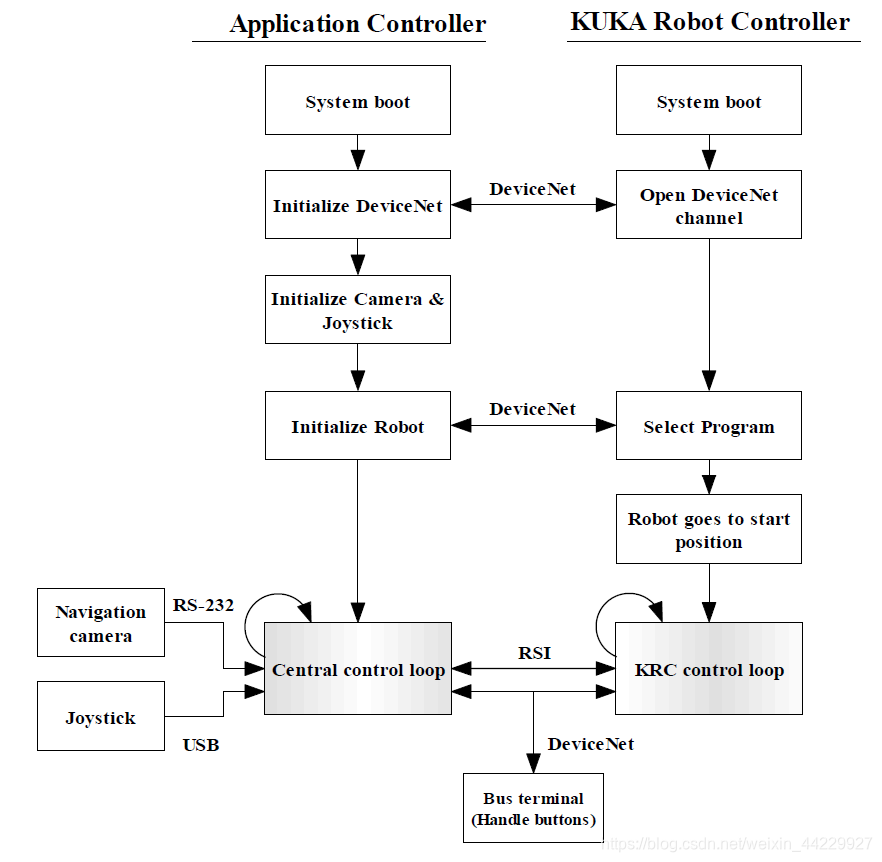
系统程序序列如图6所示。引导后,应用程序控制器初始化DeviceNet协议并打开与KRC的通信通道。 KRC的内部变量直接影响机器人的配置和运动,可以通过应用程序控制器进行外部控制。这样的变量可以,例如,打开/关闭制动器,触发外部停止,选择程序,在激活配置锁或未校准机器人运动学时发出警报等。然后,对操纵杆和摄像头进行初始化。为此,为操纵杆创建了USB通道,并为摄像机建立了串行通信。之后,开始机器人初始化。这包括使用打开的DeviceNet通道(在KRC上)选择程序。然后确认安全锁,并释放机器人制动器。然后,机器人移动到编程的初始位置。打开TCP / IP通道以便通过RSI交换数据。从应用程序控制器发出命令后,RSI数据交换开始。它由两个控制回路组成,一个在应用程序控制器中称为中央控制回路,另一个在KRC中。使用RSI,控制回路每12 ms相互触发一次。在每个中央控制回路处,应用程序控制器从导航系统,操纵杆和总线端子接收数据。然后,它将处理后的数据发送到KRC,后者又执行指令(调整机器人位置)。 KRC发回包含机器人实际状况的包裹。重复此数据交换,直到用户停止程序为止。如果存在延迟,则数据传输中断并且机器人停止。下一节将更详细地说明控制回路。
机器人控制回路
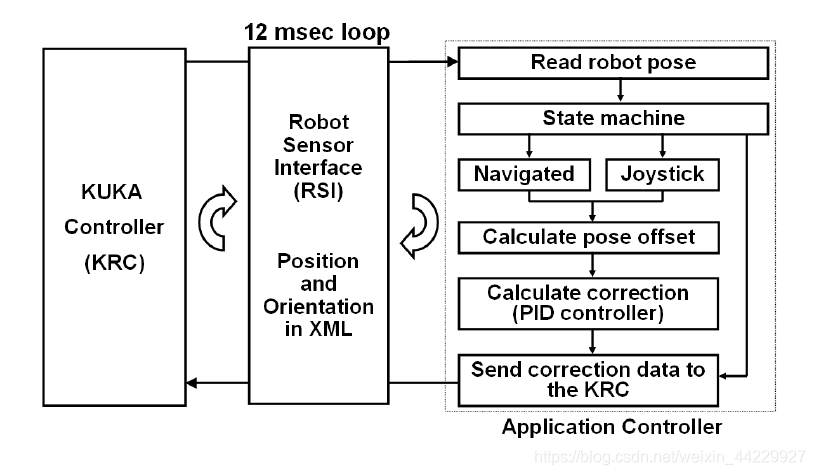
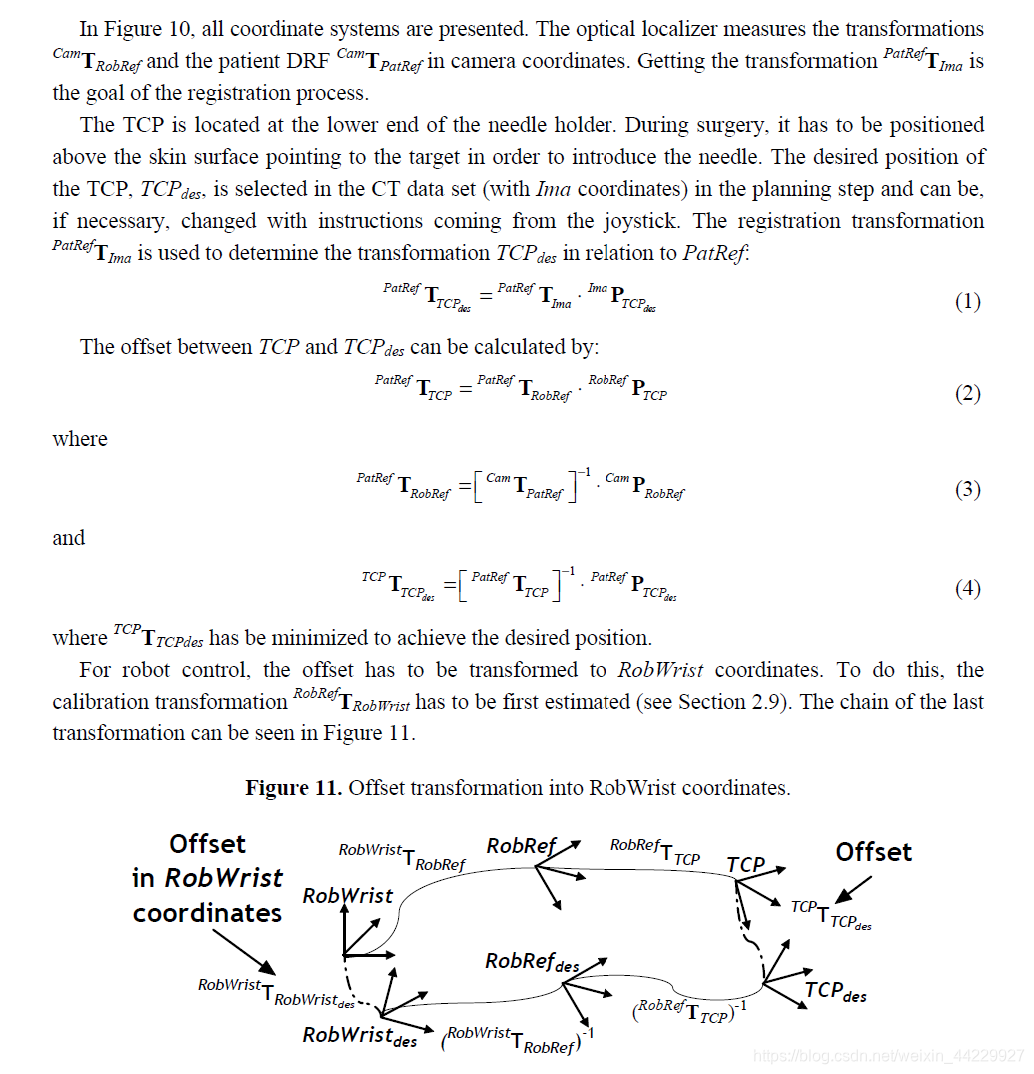
使用图7中的控制环连续测量机器人的新位置和方向。有两种方法可以控制机器人的姿势,既可以通过光学定位器获得的数据,也可以通过用户通过操纵杆给出的运动命令来控制机器人的姿势。KRC通过RSI传递机器人基本坐标中(手腕的)实际机器人姿势。 状态机检查用户选择了哪种控制模式。 如果实际模式为“导航模式”,则控制器读取工具以及患者的解剖位置和方向,并使用此信息来计算TCP设定点。 给定机器人的姿势和设定点,控制器将使用将在2.6节中介绍的一些转换来估计偏移量。 如果激活了“操纵杆模式”,则来自该输入设备的测量值将被当作偏移量。 最终,无论哪种情况,PID控制器都会获得校正值,该校正值将以TCP坐标发送到KRC。
-
图6.在初始化过程中,打开使应用程序控制器与系统的主要组件通信所需的所有通道。然后,应用控制器和KRC通过RSI交换信息,以控制机器人的运动。
-
图7. 控制循环,用于操作应用控制器中的机器人姿势。
设备网链接
DeviceNet链接用于在应用程序控制器和KRC之间共享其他输入和输出。此类I / O独立于RSI通信运行,并用于初始化KUKA控制器,共享其他信息并用作中断。按下机器人手柄按钮后,此输入将通过总线端子(德国Verl的BECKHOFF New Automation Technology GmbH的BK5250)转换为DeviceNet协议,并最终与两个控制器共享。
DeviceNet是一种通信协议,在自动化行业中用于互连控制设备以进行数据交换。它使用控制器局域网作为骨干技术,并定义了一个应用程序层来覆盖一系列设备配置文件。典型的应用包括信息交换,安全设备和大型I / O控制网络。 DeviceNet是自动化行业中一个非常普及的标准,并且由于其实时功能,KUKA Robots广泛使用DeviceNet来控制其机器人。 KUKA控制器配有DeviceNet卡,可用于与外部PLC(可编程逻辑控制器)或计算机共享信息。
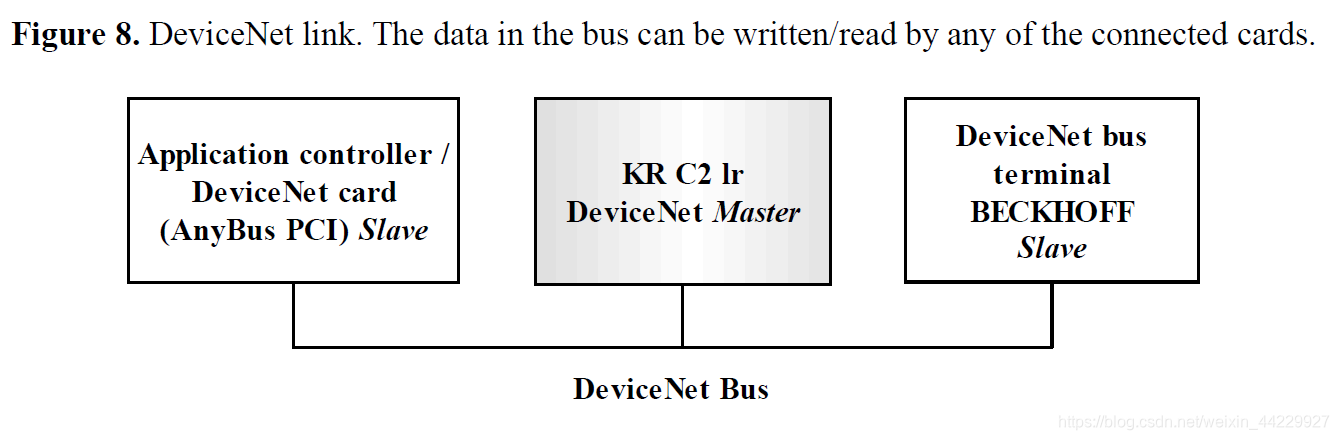
KR C2 lr控制器已经配备了主DeviceNet链接。因此,在应用程序控制器中安装了DeviceNet从属卡,以与KR C2 lr之一连接。所使用的卡是具有500 Kbit / sec的波特率和512个可编程I / O字节的AnyBus-PCI DeviceNet从站(HMS工业网络AB,瑞典哈尔姆斯塔德)。 DeviceNet数据在应用程序控制器,KUKA控制器和总线端子之间共享(图8)。
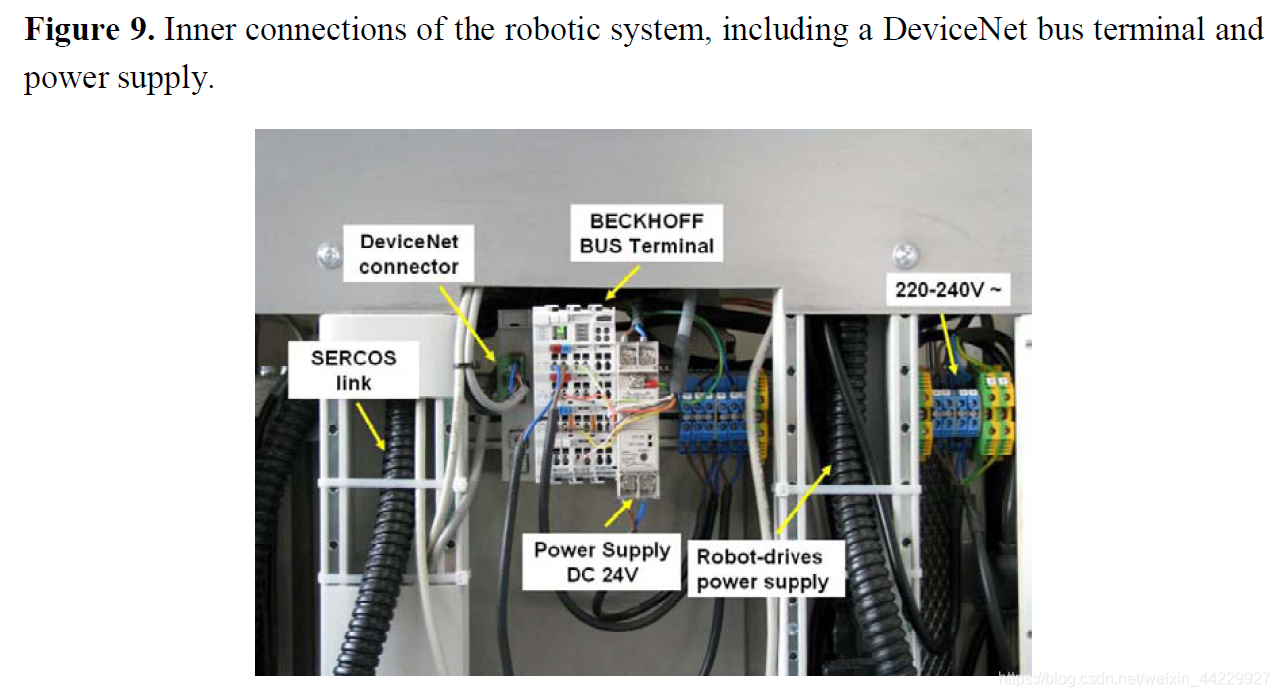
DeviceNet安装在与机器人平台相连的机架中。 在图9中可以看到一些物理连接,包括DeviceNet总线端子,电源和控制机器人系统的电缆。 总线端子使用分配在端子中的24伏直流电源。
导航
选择了光学定位器(Polaris,NDI,加拿大安大略省滑铁卢),用于机器人系统的开发和评估。 在最终的临床设置中,将使用带有计划站的商业导航系统。 光学定位器跟踪动态参考框架(DRF)的位置和方向。 这些框架具有四个后向反射球,光学定位器可使用这些球进行精确检测(如果有三个或更多球,则可以以其中一个球为中心构造坐标系)。 光学定位器更新速率为20 Hz,定位精度为0.35 mm(rms)。 由于控制环路以83 Hz的频率运行,因此,具有较高采集速率的光学定位器将是更好的选择,但不幸的是,它并不在手。 在这项研究中,光学定位器尚未安装到C型臂上。
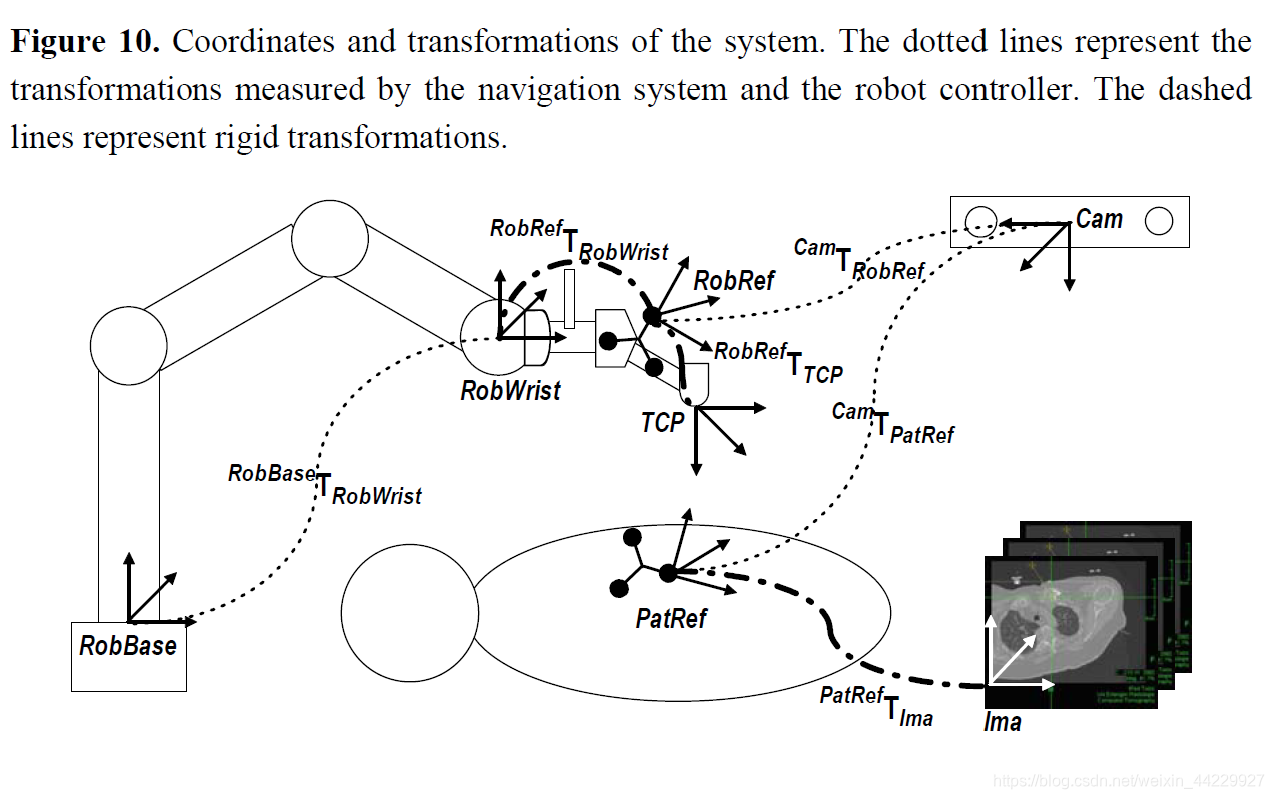
涉及一些坐标转换,直接复制了。
系统转换
为了将针引导到解剖区域,必须将机器人和目标区域关联起来。 为此,必须找到两个坐标系之间的变换。 在本方法中,光学定位器用作中间坐标。 光学定位器可同时跟踪机器人的实际位置和患者的实际位置。 在配准过程中执行利用光学定位器相对于3D图像测量的患者实际位置。 为了使机器人与光学定位器相关联,需要进行校准过程。
配准(Registration)
与可能将DRF固定到骨骼的骨科手术相反,在软组织上进行针头放置手术。 由于组织变形,无法进行刚性固定。 因此,采用了由Nagel等人介绍的特殊注册方法[26]。 此方法中使用的设备形状可显着减少由组织变形引起的误差。 它由一个DRF固定在一个框架上组成,该框架的中央有一个空白空间(用于插入针头),CT标记以已知的几何形状分布。 真空袋用于稳定患者的动作。 从DRF到CT标记坐标系的转换是事先已知的,并用于获取转换T将患者图像注册到导航系统。
标定(Calibration)
实际上就是手眼标定。但是其实现方法和我之前见到的不太一样,在此先不做深究,可作为todo

- 机器人旋转。将小铁尖插入针架。使用重力补偿模式对机器人进行取制,将铁尖插入固定 divot 中。当光学本地化器指向机器人工具时,用户将机器人旋转旋转约 30 秒。
- 自动序列。参考 DRF 连接到机器人底座附近(始终在摄像机测量体积内)。在用户命令后,机器人跟随一系列动作。
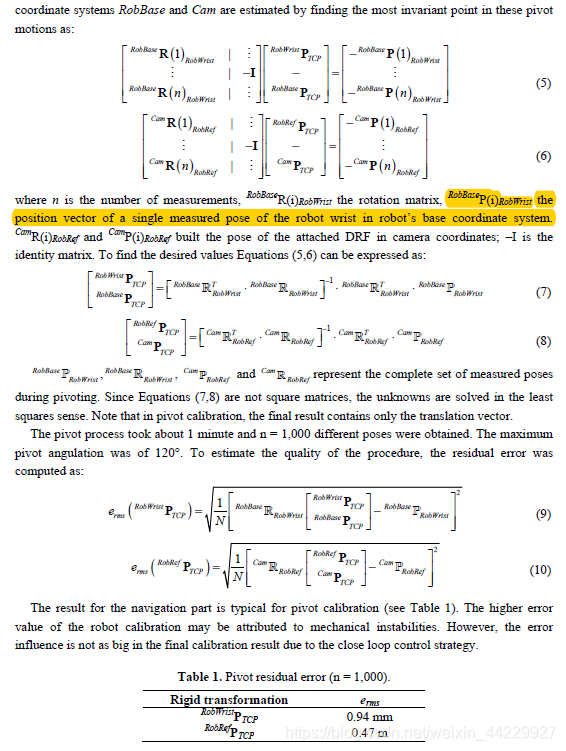
Robot Pivot Calibration
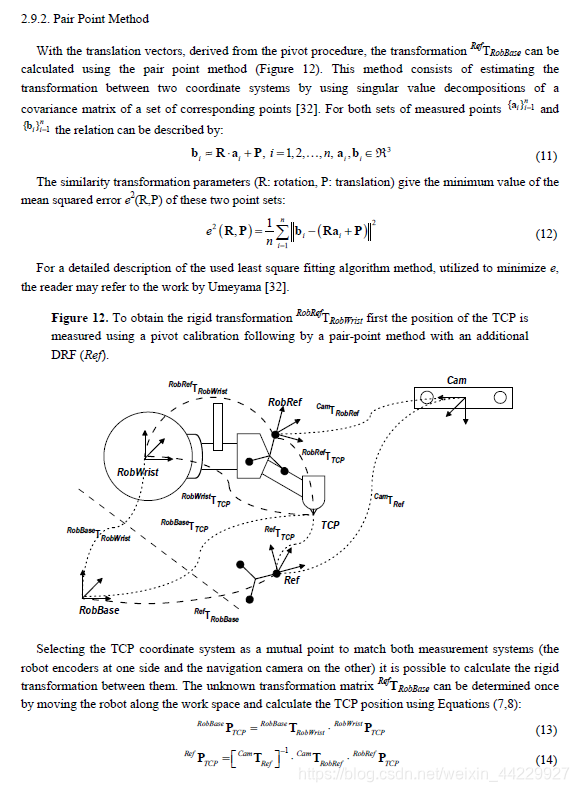
pair point method
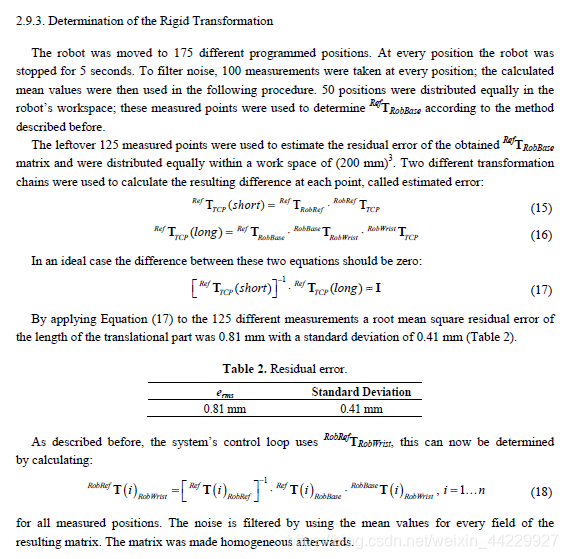
Determination of the Rigid Transformation
用户控制模式
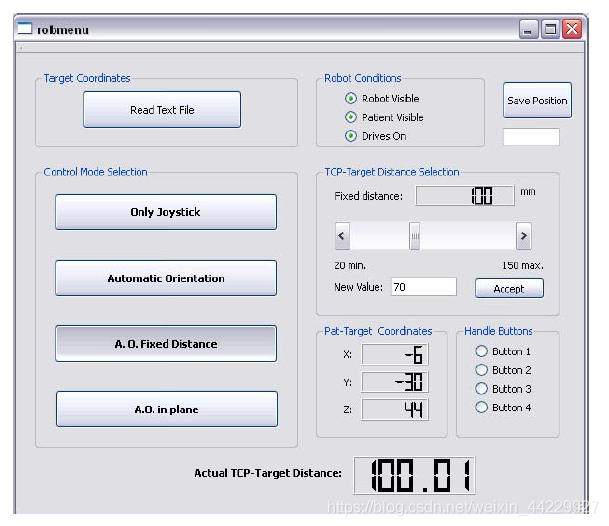
图形界面 (GUI) 旨在轻松选择机器人的功能(图 13)。也可以从文本文件中读取与患者相关的目标坐标。它还告诉用户机器人和患者何时对导航摄像头 不可见。连续显示从 TCP 到目标的实际距离。
- 图13. 图形用户界面。用户可以选择所需的控制模式和轨迹坐标。此外,界面显示机器人和患者相机之间有视觉接触
接下来将说明用户控制模式:
- 操纵杆。 在此控制模式下,TCP 可以根据图 14 在笛卡尔坐标中移动。操纵手柄向左移动对应于机器人向左移动,例如右、前和后运动。通过按下侧操纵手柄按钮 ,机器人可以沿针方向(TCP 坐标中的 x 方向)以恒定速度来回移动。机器人在内部计算所有必要的变换。如果用户想要更改 TCP 方向(但保持位置),只需按操纵手柄的上部按钮即可沿 α 和 β 开始移动(参见图 14)。
- 图14. 工业操纵手柄用于在笛卡尔坐标中移动 TCP。通过按下操纵手柄的上部按钮在 TCP 旋转是可能

- **自动方向。**选择此模式后,机器人会自动将 TCP 定向到目标,如图 15 所示。仍可能使用操纵手柄更改 TCP 位置,就像在"仅操纵手柄模式"中一样,**但一旦操纵手柄释放(实现了新的所需位置),机器人将再次定向目标,但现在从新的角度。此控制模式对于查找新的入口点非常有用。在手术过程中,放射科医生可以移动到不同的入口点,并决定哪一个可能更充分。**与上述 RCM 方法(其中只能选择一个入口点)(否则,必须重复整个笛卡尔定位,这涉及到手动将机器人移动到皮肤上的不同位置,然后再次尝试旋转)对放射科医生更有帮助。
- 图15.在自动定向模式下,机器人每次操纵手柄运动后都会根据目标定向TCP。如果患者移动,机器人将反应并补偿患者的移动,并再次指向目标
- 具有固定距离的自动方向:此控制模式的工作方式类似于自动方向模式,用户可以决定轨迹距离的唯一区别。用户可以在 GUI 上输入所需的距离。
- 平面中的自动方向:通过选择此模式,TCP 只能沿位于患者皮肤上的假想平面移动 TCP。TCP 随时指向目标。
Results and Discussion
对已开发的部件和程序进行了初步精度测试。整体链误差包括成像系统引入的错误、规划、患者注册和患者组织无法识别的运动。机器人系统及其与导航系统的连接提出了其他误差,即机器人运动误差、机器人校准误差、导航系统测量误差和仪器校准误差。这些错误在三个实验中进行了评估。前两个实验,即运动学和成像系统误差的评估,可以在 [10] 中看到,表明机器人能够达到精度与光学定位器类似的定位,0.35 mm (rms)。在这篇文章中,只有整体误差被测量在下一个实验。
Accuracy Tests for Targeting a Needle
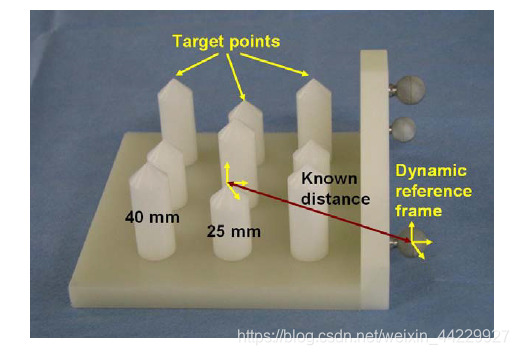
这些测量使用专门设计的测试设备和 Artis zeego 成像系统进行,用于错误可视化。测试装置由九根杆组成,其尖端沿不同位置分布,图 16。较高的五根杆的高度为 40 mm(从基座到尖端),而较小的四根杆的高度为 25 mm。DRF 连接到测试设备的一侧。从 DRF 的坐标系到杆尖的距离是事先知道的。测试装置的构造精度约为0.01毫米。
- 图16. 精度测试设备。杆相对于所附 DRF 的尖端 位置已提前知道
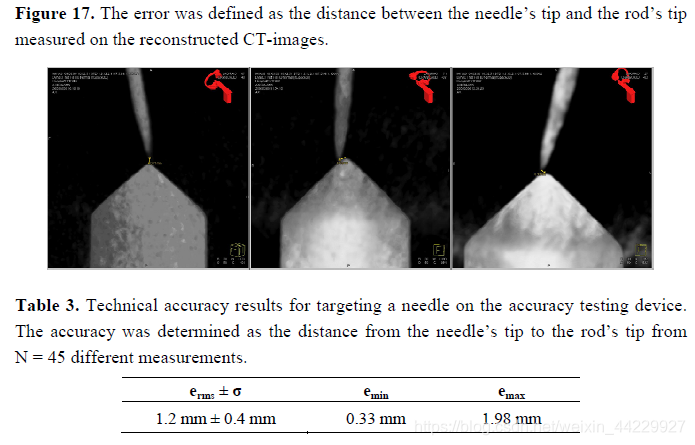
在实验中,带机器人系统的手推车被放置在CT表的一侧。使用重力补偿模式,将机器人的工具放置在测试设备上,测试装置位于 CT 表上。使用图形界面,对机器人系统进行编程,并设置所选尖端的位置。使用操纵手柄控制模式,TCP 相应地放置在所选尖端上。在图形界面中选择的自动方向命令后,机器人将 TCP 定向到目标。从杆垂直到 TCP 的角度不超过 45 度。实验是在每个杆(30~60毫米)使用不同的轨迹长度进行的。然后,通过激活机器人的制动器来停止机器人,并插入一根直径为 2 mm 的 150 mm 针头,直到尖端达到杆的峰值。使用具有 512 个 512 基矩阵和 0.13 mm 体美的高分辨率内核执行和重建 CT 扫描 ×(20 s,200° 旋转范围)。距离误差定义为在 CT 图像中从针尖到杆尖的测量距离(图 17)。
实验从五个不同的方向反复接近所有棒,结果共45次测量。生成的根平均方形定位误差 erms 及其标准偏差σ最小和最大偏差 emin 和 emax。
结论/展望
本研究介绍了一种全传感器化的手术干预协同机器人系统。这些类型的系统在很大程度上依赖于来自不同传感器的信息。因此,本文的主要焦点在于传感器技术的采用。机器人系统被调整为将针头放入解剖区,如肝脏、肾脏和肺。在这些类型的操作中,目标可视化通常需要介入放射学程序。 该系统使用光学本地化器进行机器人控制和患者跟踪。在目标可视化方面,引入了机器人驱动的 FD-CT,使系统能够灵活地使用操纵杆和踏板沿患者表移动。开发中的移动机器人平台可以轻松定位在术中。LWRIII 机器人控制策略允许机器人用手操作。对于精细的动作,机器人可以通过操纵杆操纵,而目标是固定的,帮助临床医生选择不同的入口点。可自动可回收的刀柄可支持不同机器人操作的不同类型的工具。 专为需要实时响应的手术应用开发应用控制器。由于 RSI 以太网,可以进行实时控制。 由于存在不同的系统组件,即机器人臂、机器人驱动的FD-CT和光学定化器,因此需要一个校准过程。对于临床医生来说,无需技术援助即可轻松完成此校准过程。校准完成后,从视觉上确认机器人对新编程姿势的反应更快。在稳定状态下没有出现有意义的振荡。当患者参考框架以缓慢运动手动移动时,机器人可以平稳地镜像移动。然而,对于大动作,机器人的反应速度不够快,无法反映运动。因此,可以声称,建议的设置只能补偿小病人的运动。使用卡尔曼滤波器和使用频率更快的光学点位器(100 Hz)将改善这种反应。
在机器人系统定位点时,存在整个误差链。最大的误差包括机器人校准误差、光学定化器误差、测试设备构造误差和图像重建误差。获得的误差为 1.2 mm,标准偏差为 ±0.4 mm 似乎是可以接受的,但不足以满足某些关键应用的需求。使用精度更高、体积更小的导航摄像头(如 MIRO [33})可以提高精度。使用过的组件中,会出现视线问题。这主要是因为同一工作空间中的许多组件存在。在这项研究中,我们通过将导航摄像机连接到 C 臂来部分解决此问题,如图 1 所示。移动 C 臂不会影响摄像机测量,因为它们与 DRF 相关。最后,导航数据还可用于实时三元重建。
问题
- CT影像和病人之间的坐标系如何相互转换?
- 病人自身发生移动怎么办?
- 机器人为实现“绝对精度”差分运动的实现方式。
- 整理出手术流程。
Asensus Surgical
asensus surgical inc transenterix surgical, inc.,是一种内窥镜手术机器人。

他很大的一个特点是没有使用像达芬奇一样的平行四边形结构来保证RCM,
- 这就导致他需要不断地运动setArm去维持RCM;
- 从端分离的特点也需要他加上定位装置来来进行“手眼标定”;
- 工作空间小,无法实现手腕翻转;
- 主端的操作手是模拟真实的腔镜器械,工作空间小,手部是否能防疲劳?
综上所述这是一款全面不如达芬奇的机器人,他唯一的可能超越的优势就是“便宜”。

下面可以看一下他实际使用的视频【慎入】Senhance Prostatectomy

