- 1VMWare克隆虚拟机之后,IP地址修改_虚拟机克隆后怎么修改ip地址
- 2Git branch && Git checkout常见用法
- 3开源模型应用落地-qwen1.5-7b-chat-LoRA微调(二)
- 4Linux项目自动化构建工具-make/ makefile及其应用:多文件编写第一个linux程序:进度条(懒人学习必备博文!!!)
- 5Javascript基础 86个面试题汇总 (附答案)_javascript面试
- 6《铸梦之路》Untiy高性能自动化UI管理框架ZMUIFramework
- 7spyder安装pyqt5_spyder怎么安装pyqt5
- 81694件AI事件大盘点!2020年12月,哪些让你记忆深刻_最优子集选择问题的多项式算法 王学钦讲座
- 9Matlab怎么计算信号的能量,Matlab小波包分解后如何求各频带信号的能量值? [转]...
- 10朴素贝叶斯(Naive Bayes)_贝叶斯公式小球
四旋翼无人机学习第8节--OpenMV电路分析_openmv在无人机的应用
赞
踩
0 前言
简单的说一下,openmv模块是机器视觉模块。我的能力有限,毕竟也是初次学习,那就让我们看看大佬们怎么回答的吧。
1、OpenMV是什么
2、OpenMV新手上路1 – OpenMV简介、参数描述
看到这里应该对openmv有了简单的了解,下面当然是学习优秀的openmv作品啦。
3、小马哥自制STM32 F765VIT6 LQFP100焊接 lqfp封装芯片快速焊接
4、小马哥STM32四轴飞行器机器视觉版
1 openmv优秀作品介绍
首当其充的当然是小马哥团队研发的openmv啦。他们将硬件进行了开源,也方便我们进行下载,这样现有的openmv模块加上小马哥四轴无人机,即可构成一个具有机器视觉的四旋翼无人机啦。
另外,可下载的文件有
(1)电路图文件
(2)DFU下载工具
(3)openmv官方资料
(4)板框结构图
资料非常全的,之后我就以这个来进行分析哈。
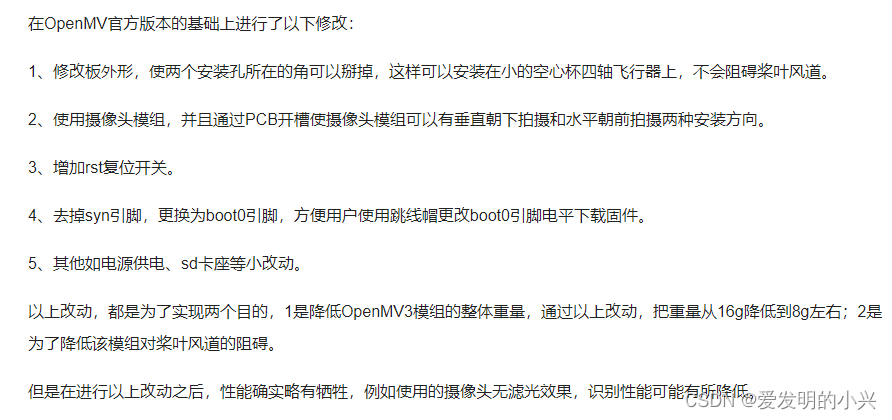
1、OpenMV3改版机器视觉模组
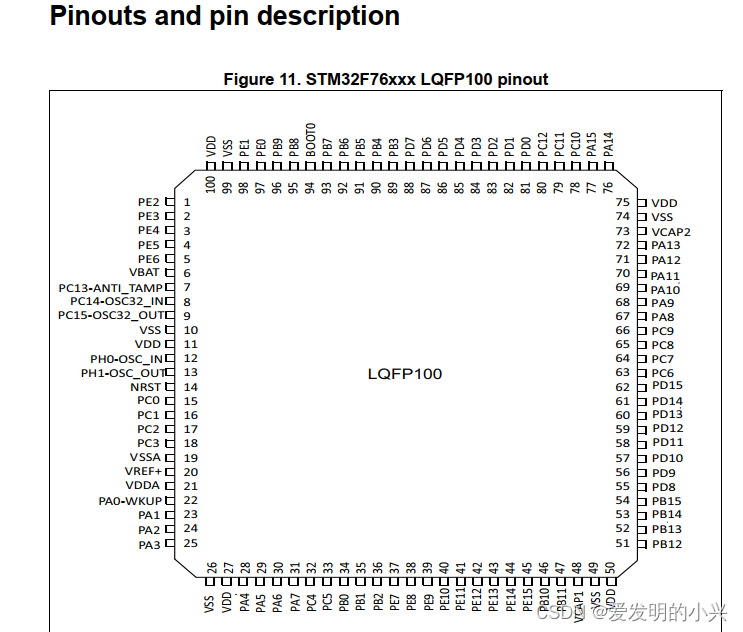
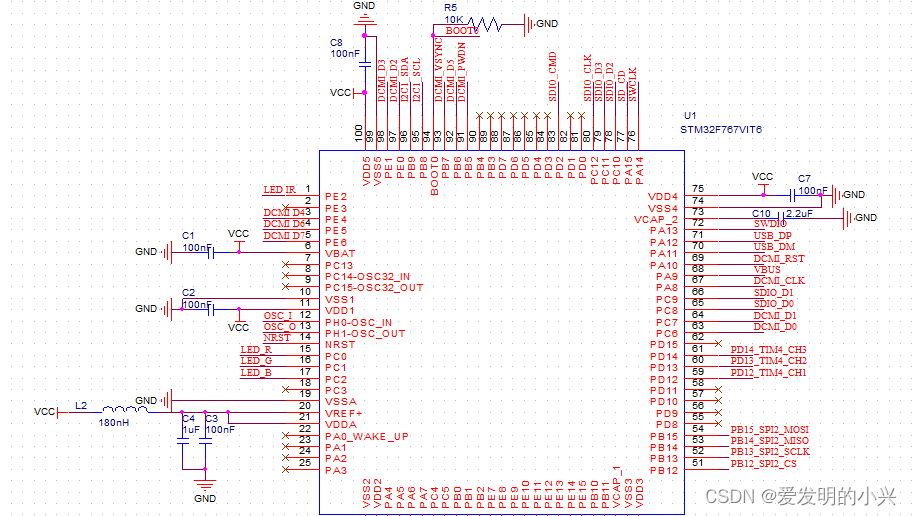
下图是资料中的原理图部分,这款芯片的型号是STM32F767VIT6,这款芯片是LQFP100封装的。
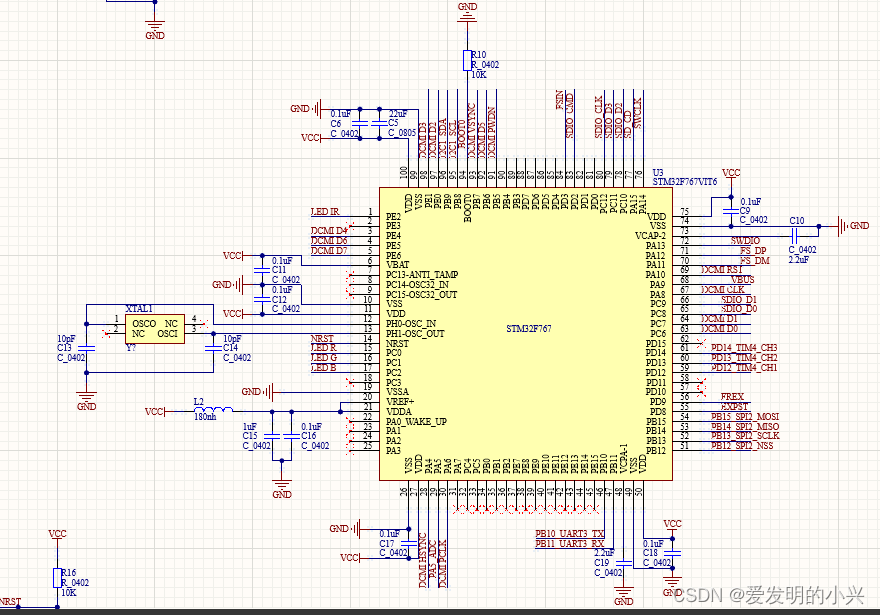
下面就用我们之前学过的知识来绘制这款芯片的原理图与最小系统电路吧。
2 stm32单片机原理图绘制
下图是datasheet的引脚分布情况。
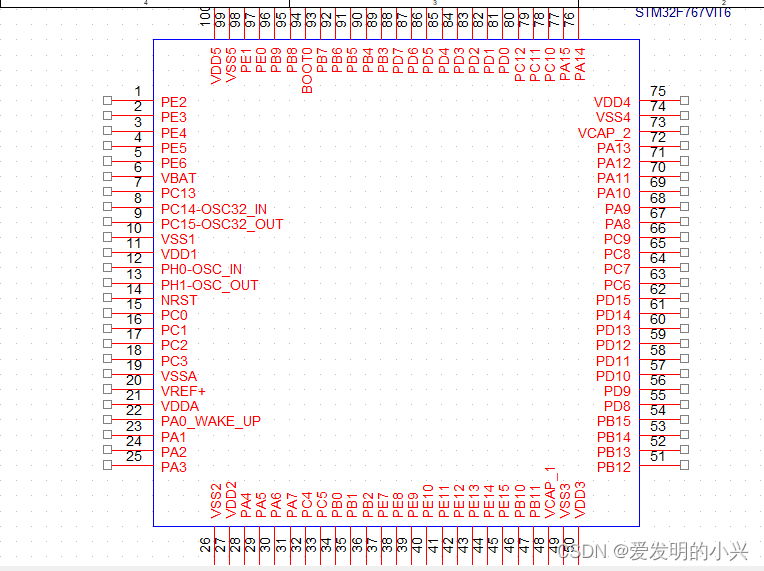
下面分享一下自己画的原理图,绘制过程可以参考四旋翼无人机学习第4节–STM32、MPU9250等器件的绘制
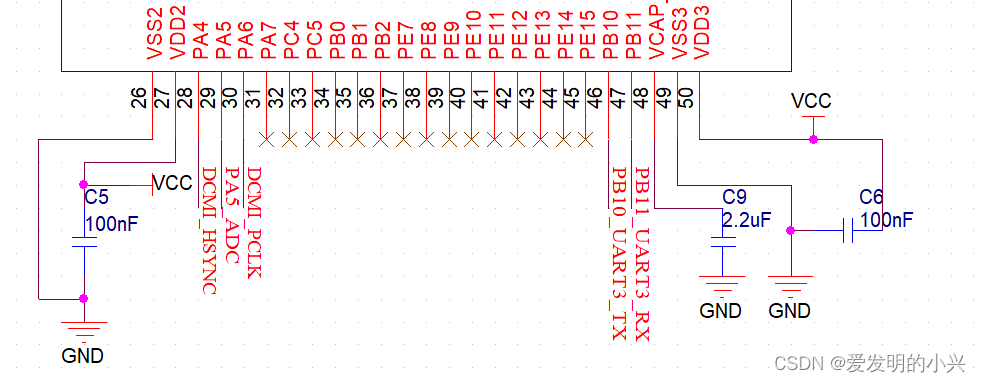
3 stm32单片机外接电容分析
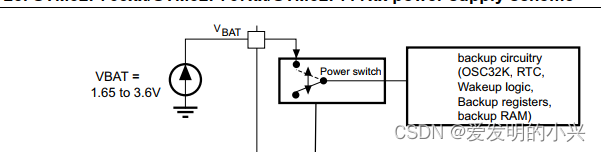
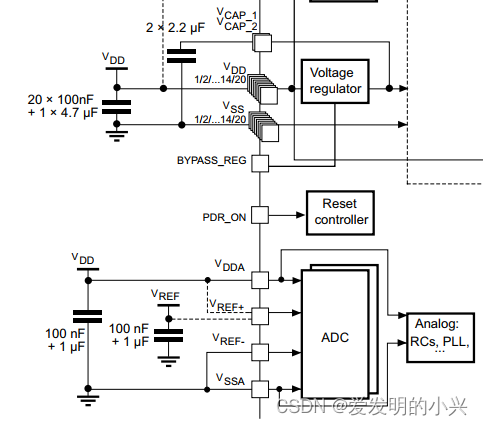
下图是芯片手册外围电路电容外接图。
1、VBAT引脚需要提供1.65v-3.6v的电源。最好在VBAT引脚与GND之间接一个100nf的电容。
2、VCAP_1引脚或VCAP_2引脚与GND之间需要接一个2.2uf的电容。
3、VSS引脚需要接地即GND。2
4、每个VDD引脚与VSS引脚(GND)之间需要接一个100nf的电容。
特别注意:The 4.7 µF ceramic capacitor must be connected to one of the VDD pin。也就是说在需要在任意一个VDD引脚与VSS(GND)引脚上接一个4.7uf的电容。
5、VSSA引脚需要接地即GND。
6、VSSA引脚需要接VDD。
7、VDDA引脚或VREF+对VSSA引脚(GND)之间需要接一个100nf的电容以及一个1uf的电容。
8、BOOT0引脚需要接地处理。
3 stm32单片机外接电容绘制
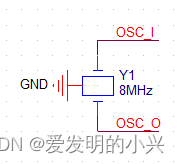
4 stm32单片机外接晶振分析
下面两张图是芯片手册中外接8mhz晶振与32.768khz晶振的接线图。
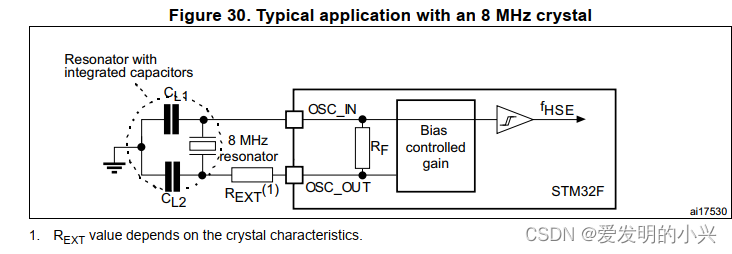
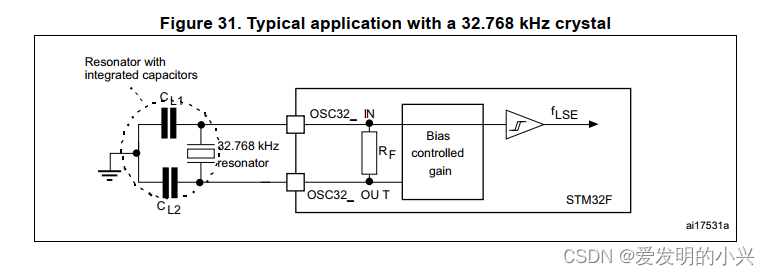
本次设计外接8mhz晶振即可。
5 stm32单片机外接晶振绘制
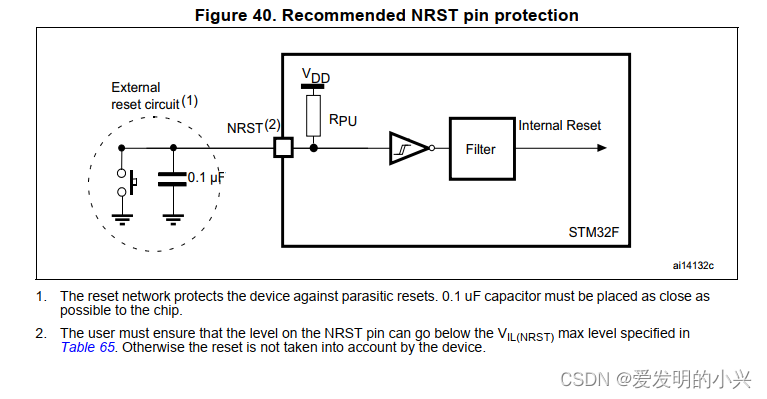
6 stm32单片机复位电路分析
下图所示的是按键复位的电路图,当按键按下即可复位。但本设计采用自动复位的方式,具体电路在之后会介绍。
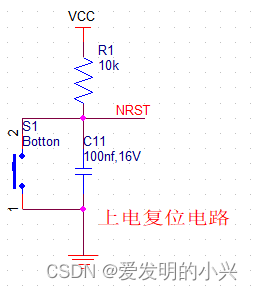
7 stm32单片机复位电路设计
上电自动复位电路,原理是当接通电源时,电容充电,NRST引脚的电平会被拉低,从而达到复位的效果。当电容充电完毕,电容相当于断路,NRST引脚的电平又会被重新的拉高。当然,在程序在运行时不正确时候,也可以通过按键来达到复位的效果。
8 外设设计分享
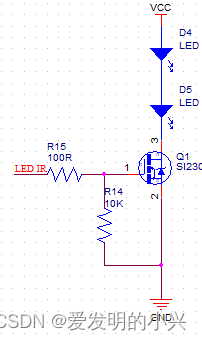
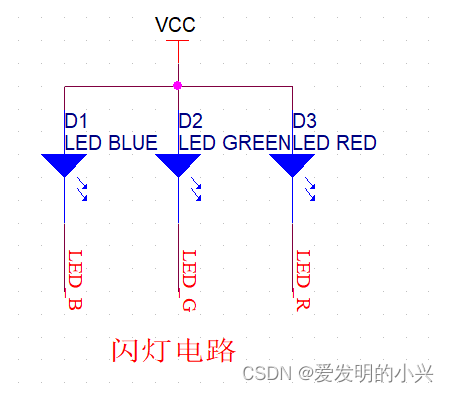
8.1 闪灯电路
控制引脚输出低电平,即可以使对应的小灯点亮。
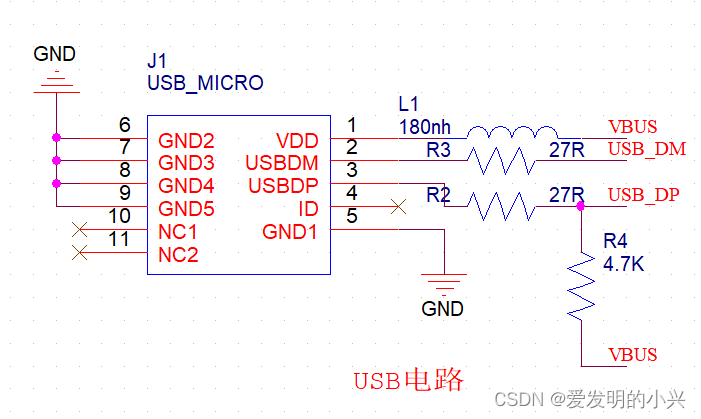
8.2 USB电路
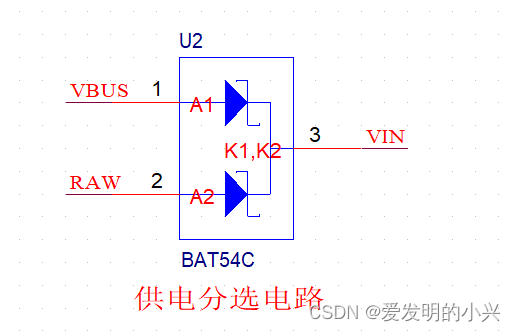
8.3 供电分选电路
输入1这里是usb提供的5V电压
输入2这里是四轴底板给openmv板提供的5V电压。
- 1
- 2
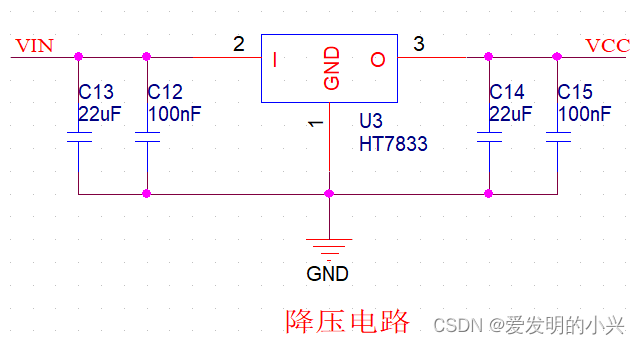
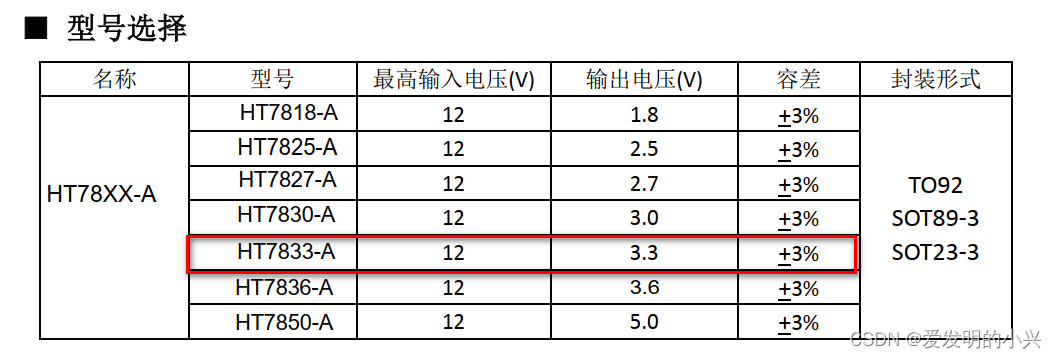
8.4 降压电路
这里用到的降压电路是HT7833模块。
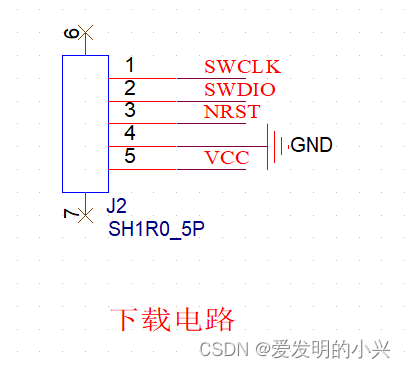
8.5 下载电路
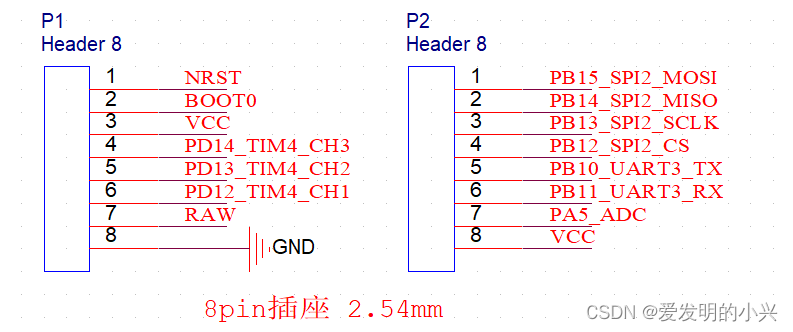
8.6 插座电路
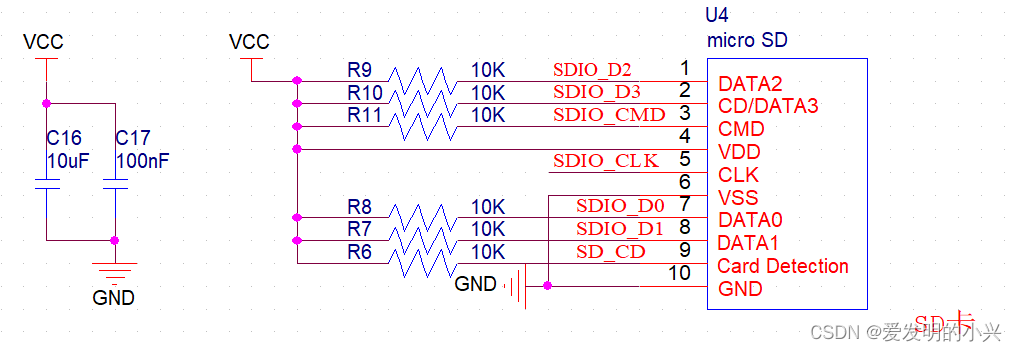
8.7 SD卡电路
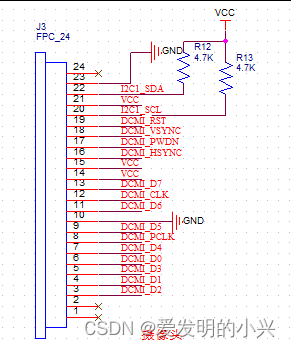
8.7 摄像头电路
8.8 小灯电路