
- 1将公共云延伸至本地,阿里云推出本地化部署服务云盒Cloud Box_阿里云盒登陆
- 2山东大学软件学院网络安全期末复习(林丰波2023.6)_squid 中间人
- 3基于JSP实现在线失物招领管理平台
- 4[网络安全]upload-labs 本地靶场搭建详细教程_upload-labs靶场搭建
- 5微信小程序自定义tabbar,页面切换存在闪动【解决方案】
- 6RK3568-RK628D调试之HDMI-IN
- 7Github 2024-01-15开源项目周报Top14_github上2024开源
- 8【雕爷学编程】MicroPython手册之 ESP32-S3-N8R8 人脸识别 class face_recognition_esp32 s3 人脸识别
- 9人人都能学会的PHP安装教程(Mac)_php 安装cloning into '/users/zhanghao/library/caches
- 10基于Token实现开放API接口签名验证_token进行接口验证
使用vscode debug ros程序(A-LOAM)_vscode 调试loam代码
赞
踩
写在前面
1、本文内容
使用vscode单步调试A-LOAM源码
2、平台
ubuntu1804, ros melodic, vscode, vscode ros插件
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/125656531
源码
mkdir catkin_ws_vscode
cd catkin_ws_vscode
mkdir src
- 1
- 2
- 3
https://github.com/HKUST-Aerial-Robotics/A-LOAM
将源码放在src
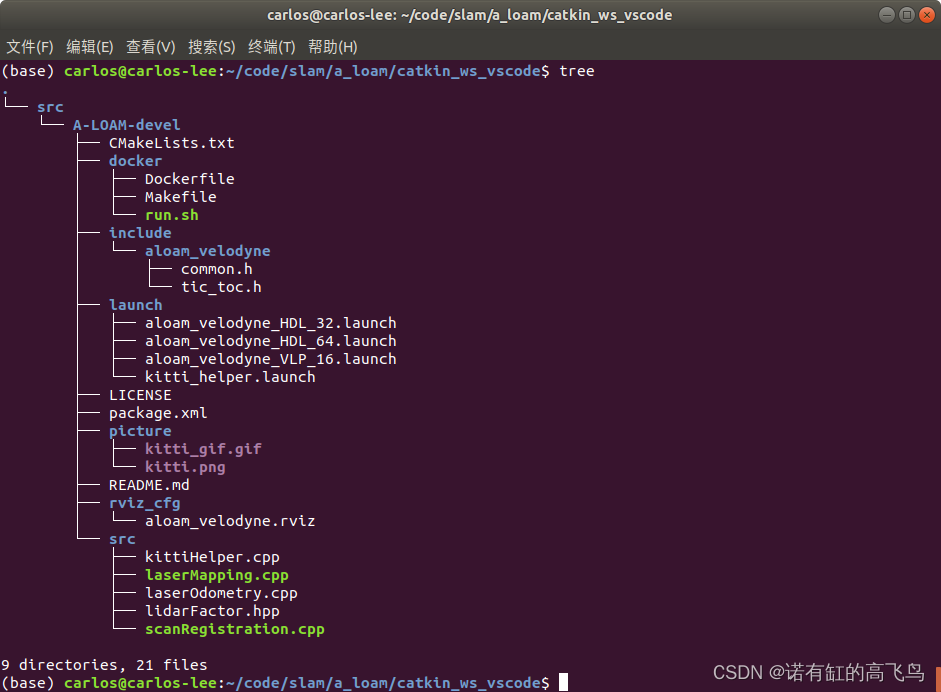
先编译一下,后面打开vscode才会自动生成c_cpp_properties.json
catkin_make
- 1
vscode
打开目录catkin_ws_vscode
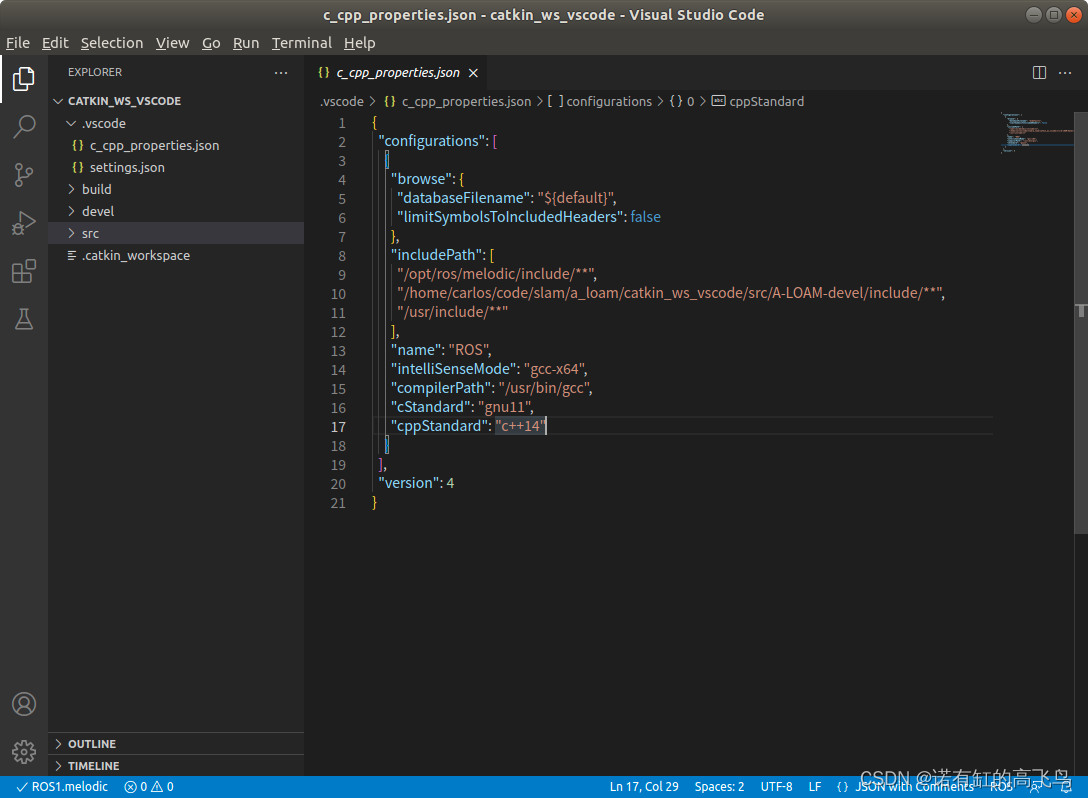
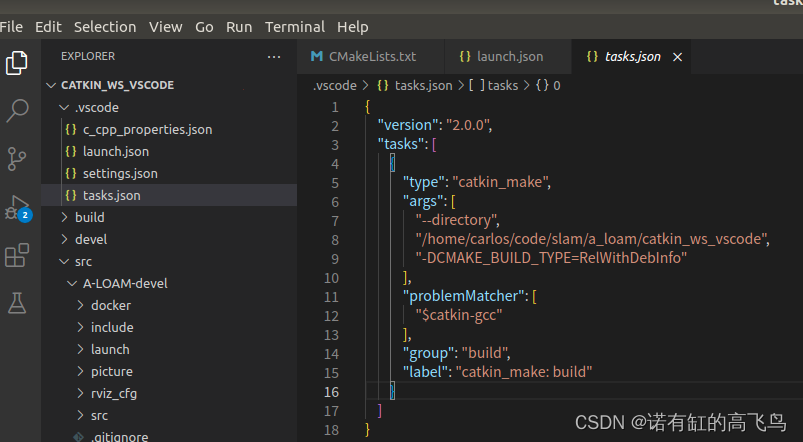
在.vscode下自动生成了c_cpp_properties.json
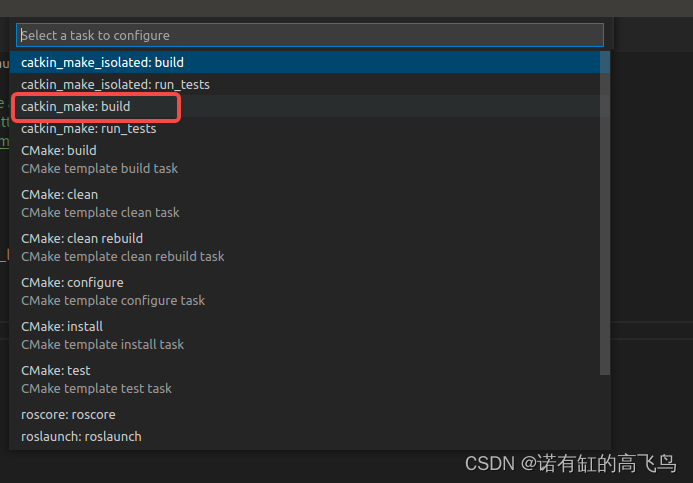
配置task
terminal–configure tasks
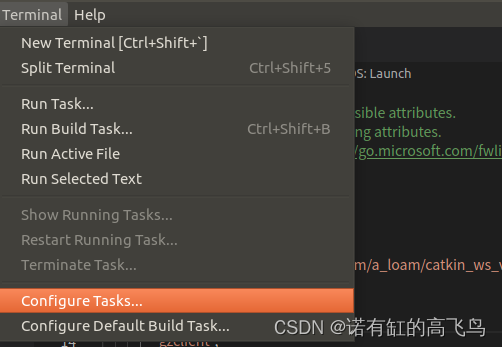
选择catkin_make: build
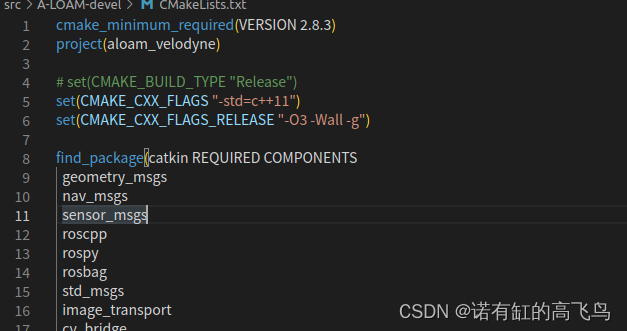
将/src/A-LOAM-devel/CMakeLists.txt里面的Release注释
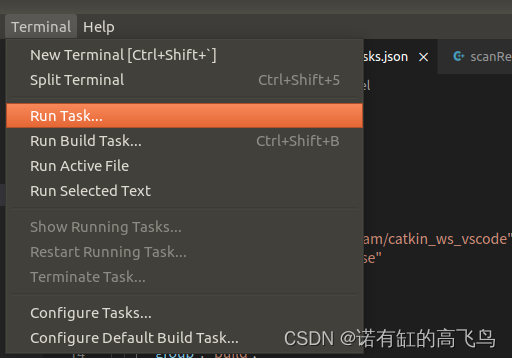
run task或者ctrl+shift+B启动编译
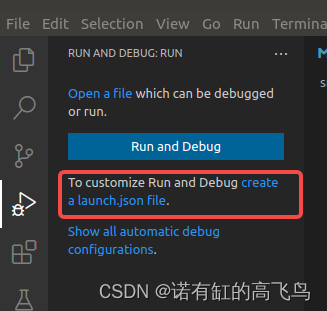
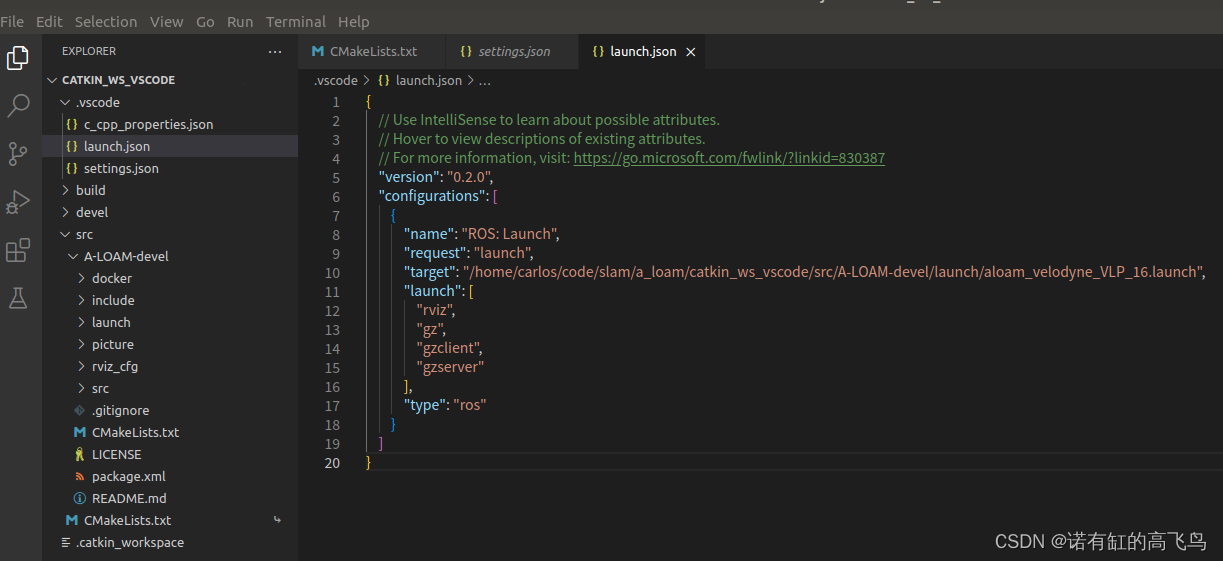
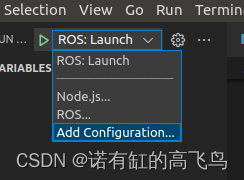
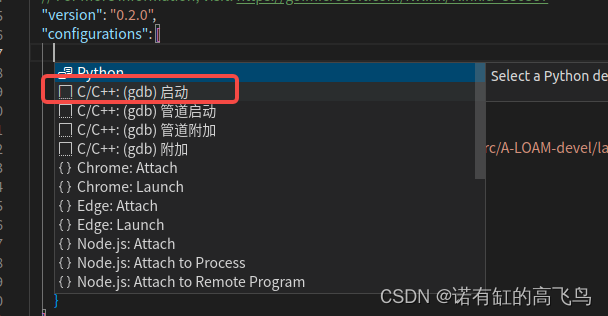
配置launch
在debug里面选择create a launch.json file
选择ros
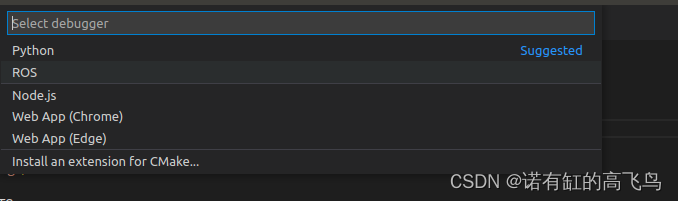
ros::launch

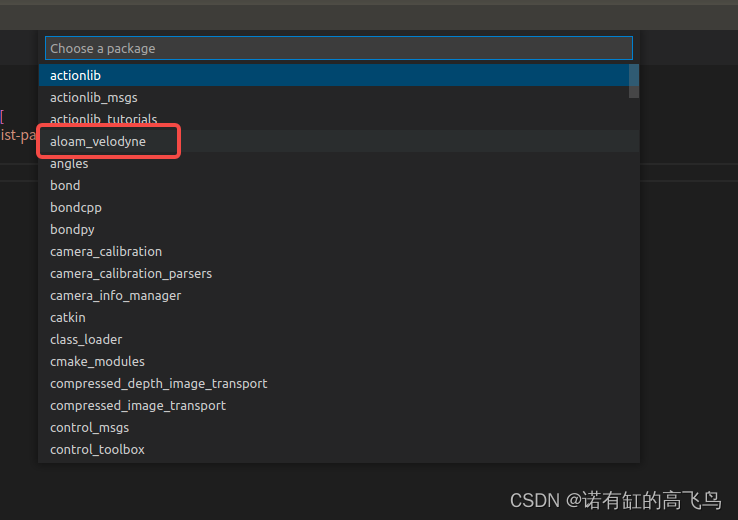
aloam_velodyne
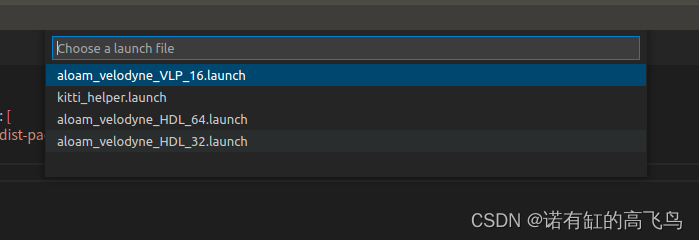
创建好的launch.json,如果有问题,可以删除此文件,再重新创建
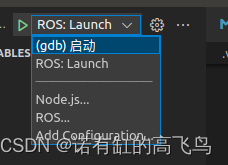
debug
在代码中设置断点,这里在scanRegistration中设置
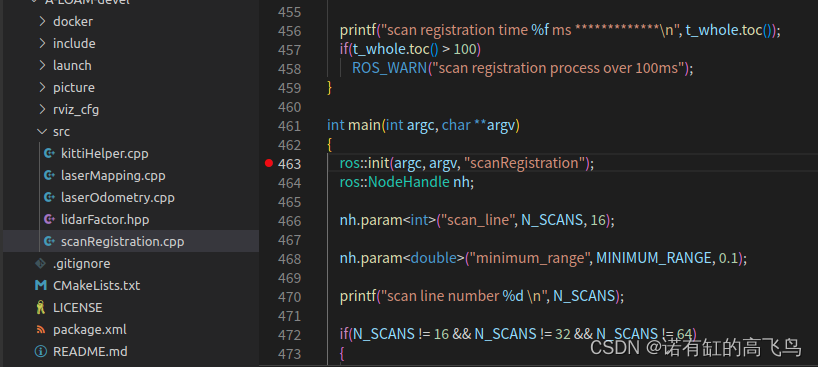
点击绿色三角形或者F5开始调试
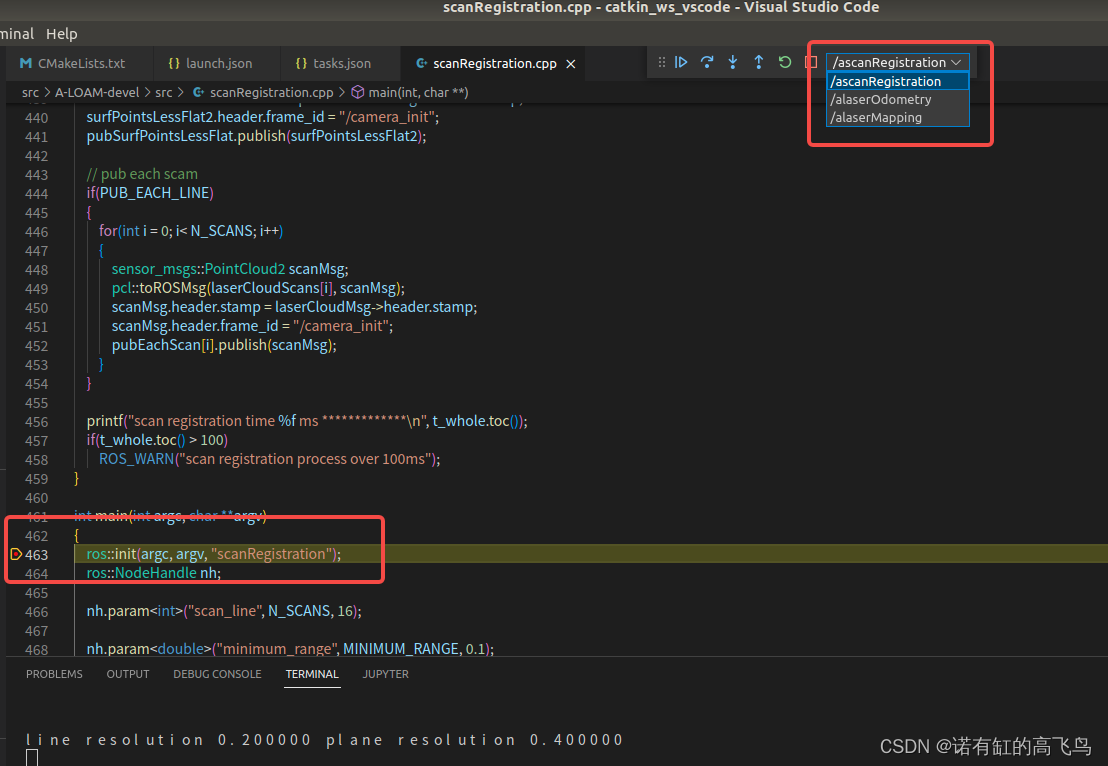
三个节点都已经被启动调试,并且ascanRegistration运行至断点处
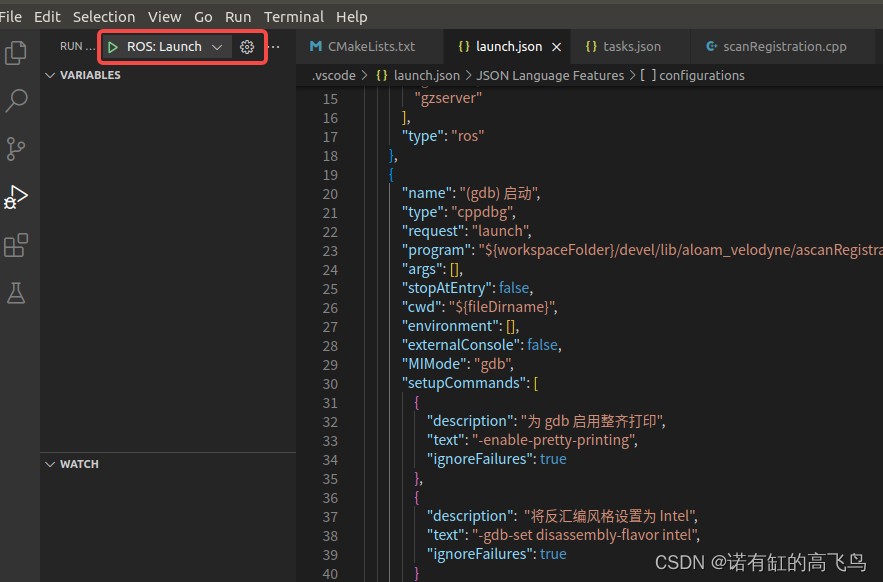
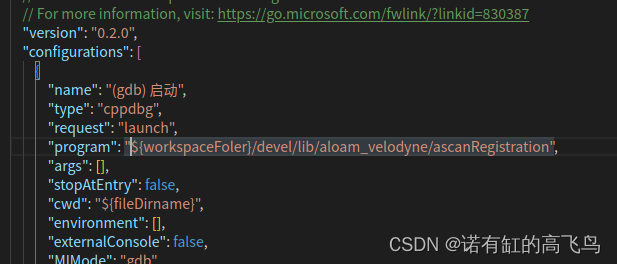
单个节点调试

将program更改为程序的路径
${workspaceFoler}/devel/lib/aloam_velodyne/ascanRegistration
同样进入断点
参考
vscode下调试ROS项目,节点调试,多节点调试,roslauch调试https://blog.csdn.net/lyh458/article/details/115711357
完
如有错漏,敬请指正
--------------------------------------------------------------------------------------------诺有缸的高飞鸟202206

