
热门标签
热门文章
- 1AI神经网络原理与Python实战:41. 图像数据处理与分析方法_ai对图片数据分析
- 2Keras——用Keras搭建RNN回归循环神经网络_# 搭建rnn神经网络模型 model =
- 3Fastgpt配合chatglm+m3e或ollama+m3e搭建个人知识库_fastgpt 接入 llama3
- 4网络攻防--网络防御技术
- 5java面试_javaweb张三转账给李四
- 6【OpenGL学习】texture_opengl texture函数详解
- 7RocketMQ 一个topic 多个消费者只有一个消费的问题_rocketmq多个消费者怎么配置
- 8工作总结
- 9node.js+uni计算机毕设项目音乐播放微信小程序LW(程序+小程序+LW)_音乐播放微信小程序运行环境
- 10从零教你实现一个物流管理系统[附源码]_物流管理系统的实现
当前位置: article > 正文
KUKA Simpro 3.0.3-第5弹(机器人关节轴活动范围监测)_kuka simpro python 机器人运动
作者:盐析白兔 | 2024-04-29 23:16:45
赞
踩
kuka simpro python 机器人运动
Robot轴关节活动范围监测
方法一:
a、确保机器人在离线轨迹的的初始位置,并且尽可能确保第一条指令为PTP;
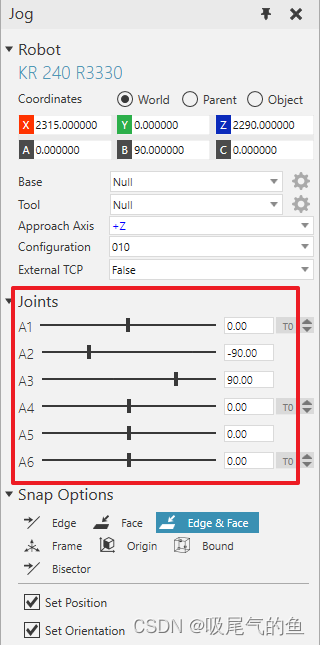
b、确保第一条指令下的机器人关节姿态为默认状态,如下图所示;
b1、点击My_Job的第一条指令,此时机器人将呈现此时的姿态;
b2、点击Save State,保存机器人此时姿态;(此时保存姿态下,每次Simpro项目打开,机器人都会以此种姿态呈现);
b3、点击Simulation上的Reset,置空机器人关节活动的数据值;
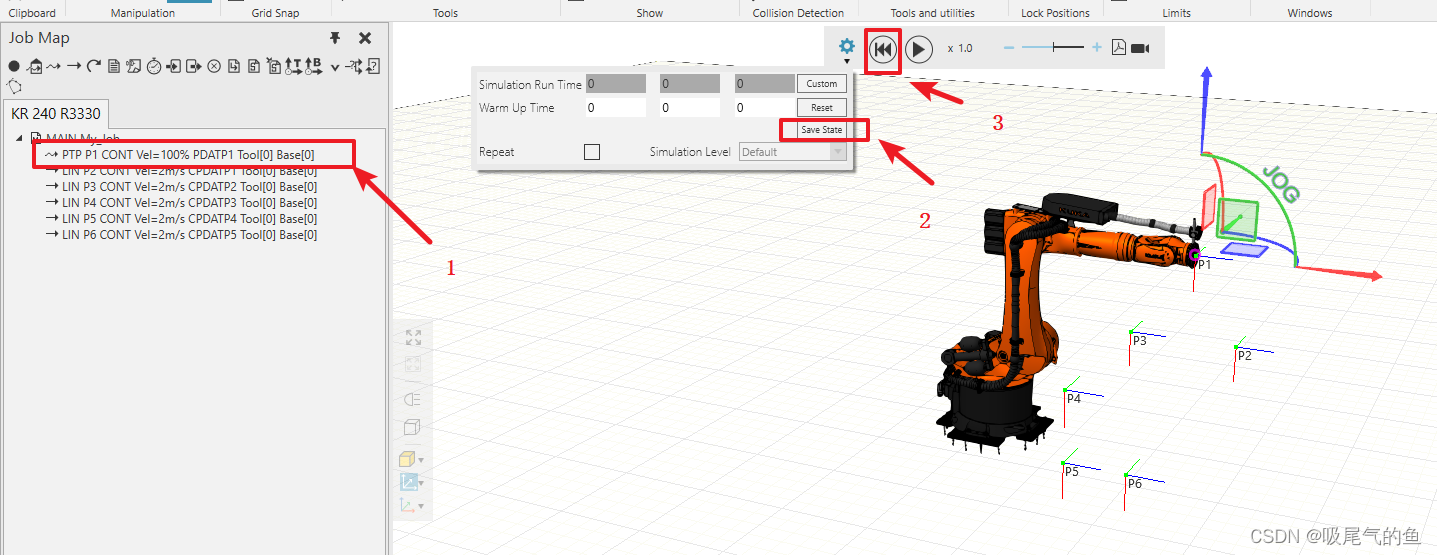
b4、此时Program——Jog——Robot——Joints上各关节没有活动范围显示;
c、Simulation——Play——运行仿真程序,运行结束后。在Program——Jog——Robot——Joints——此时各关节轴上存在活动量,鼠标移至相应的关节轴上,将呈现对应关节轴的运动范围;
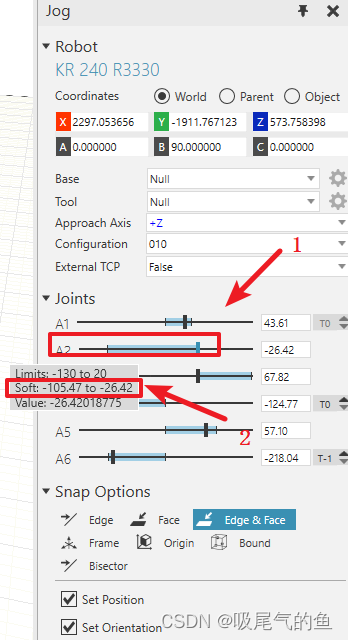
d、同理查看其余各轴活动范围;
方法二:
a、利用Home——Statistics数据统计;(打开页面如图所致)(3——折线图;4——采样间隔时间s;5——导出格式)
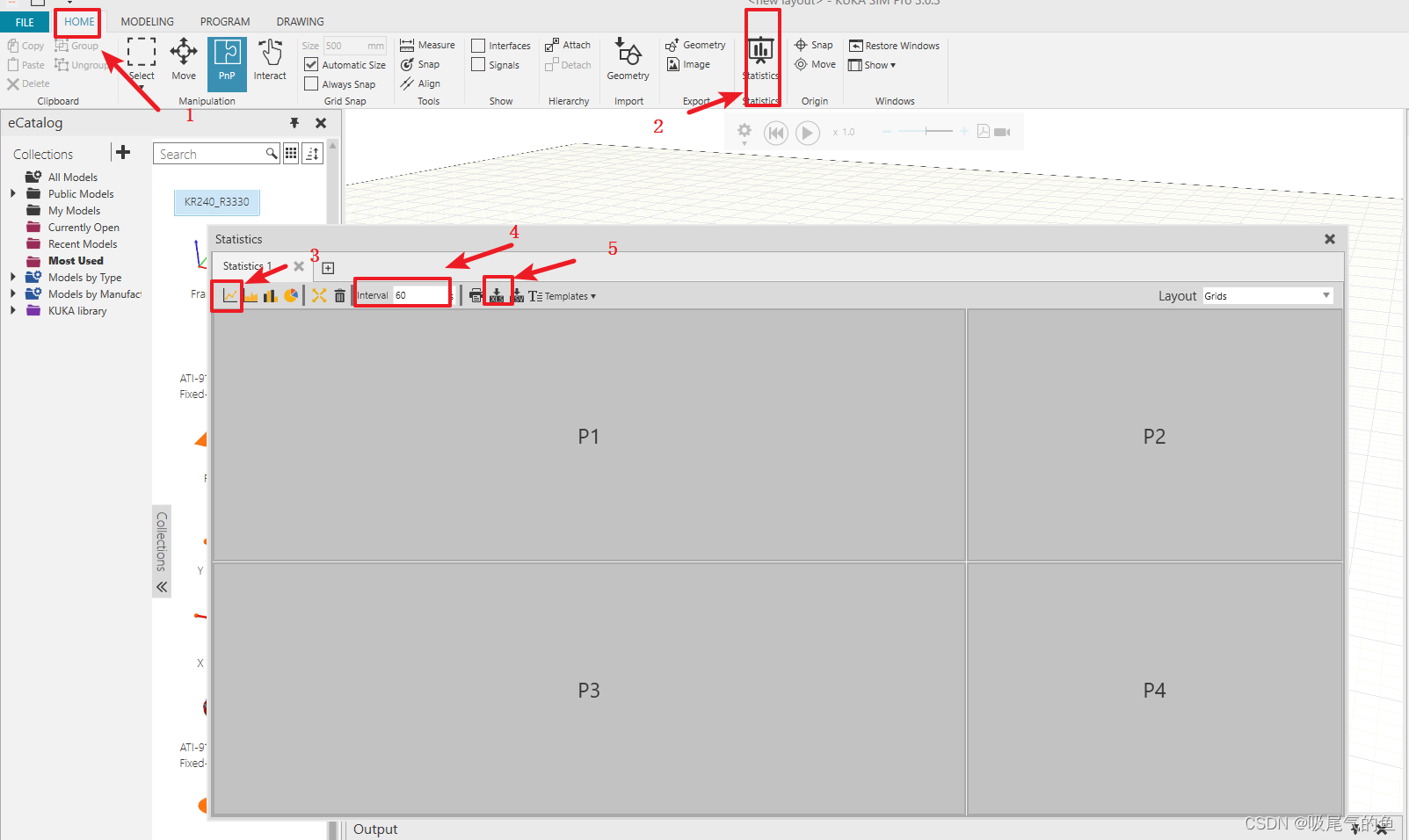
b、Statistics监控robot的关节轴设置如下图:
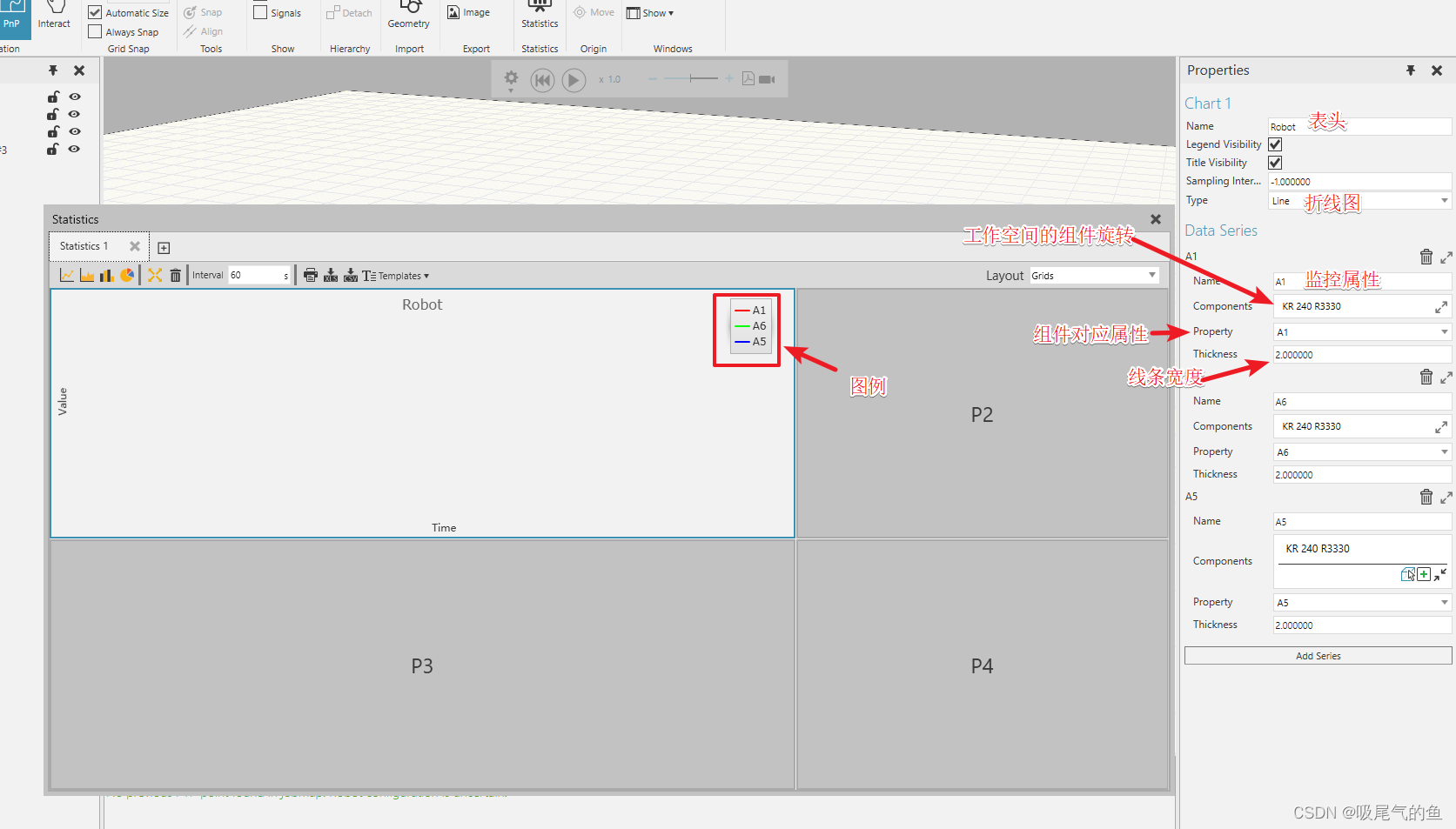
c、修改采样时间,并运行仿真开始键(运行时确保机器人位于第一条指令处),记录各关节轴的运动;
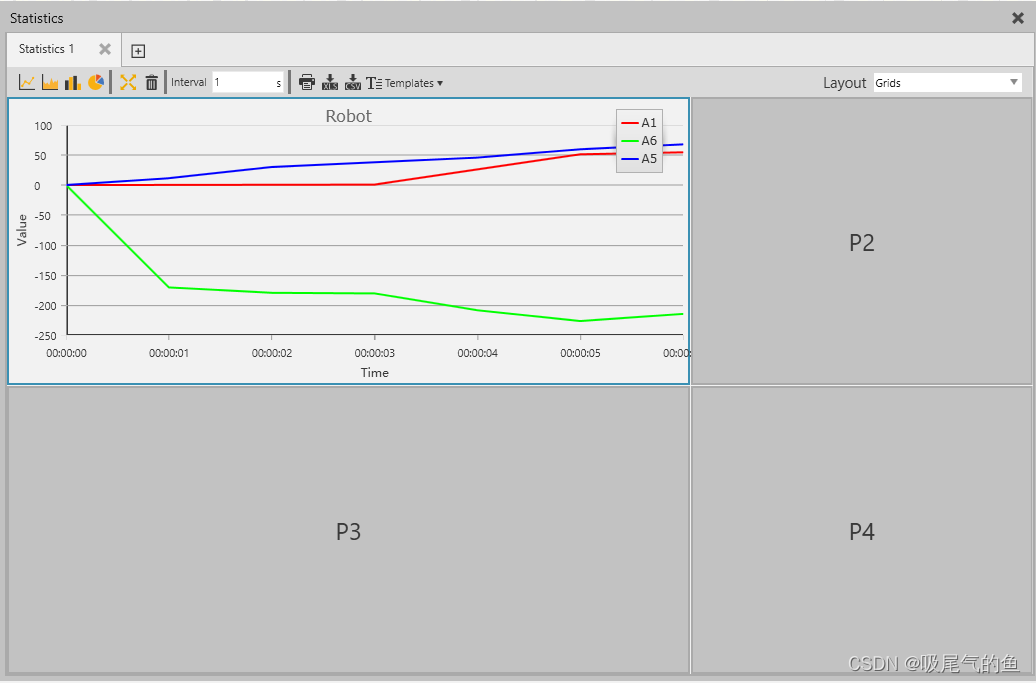
d、根据需要可以件数据导出到Excel中;
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/510283
推荐阅读

相关标签

