
热门标签
热门文章
- 1LSM(Log-Structured Merge Tree)_lsm tree
- 2git报错:error: RPC failed; HTTP 413 curl 22 The requested URL returned error: 413
- 3leetcode-没有重复项的全排列-97
- 4Serverless无服务器架构和传统服务器的区别_serverless无服务架构图
- 5Halcon_标定_halcon标定
- 6排序-八大排序FollowUp
- 7自然语言处理(NLP)--研究领域概况_数据挖掘的研究内容包括核光滑处理
- 8微信小程序使用Git管理代码_微信小程序开发者代码初始化git账号是什么账号
- 9(转载官网)Chat2DB使用教程
- 10聊一聊前端面临的安全威胁与解决对策
当前位置: article > 正文
Robust Real-time UAV Replanning Using Guided Gradient-based Optimization and Topological Paths_fast planner论文
作者:盐析白兔 | 2024-05-06 06:08:01
赞
踩
fast planner论文
这篇论文是港科大开源的无人机运动规划fast planner的第二版,这里写下我对这篇工作的理解。
摘要
基于梯度的方法(GTO)容易陷入局部最优,本文就是提出一个新的基于GTO的方法来解决这个问题。
相关工作
基于梯度的路径优化
GTO是一种主要的路径生成算法,把路径生成看作一个最小化目标函数的非线性优化问题。
拓扑路径规划
用拓扑路径来进行规划
路径制导轨迹优化
A. 优化失效分析
GTO规划的失败和不好的初始路径有关。如下图所示,在欧式符号距离场(ESDF)中,梯度会拉动路径让它离开障碍物,但是如果路径穿越“山脊”或者“山谷”,梯度会是两个完全相反的方向,让路径规划出现问题。
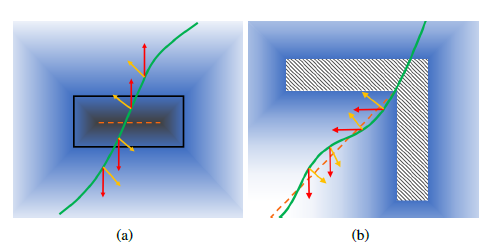
对于这种情况,仅仅靠ESDF的梯度并不够,需要额外的信息。
B. 问题公式化
文中提出的PGO方法是对上面GTO的改进,它把路径用B样条来表示。对于PGO方法,分为两步,第一个阶段产生一个过渡的预热轨迹(warmup trajectory),然后对这个warmup trajectory的平滑度和净空度再进行优化。两个阶段如下图:
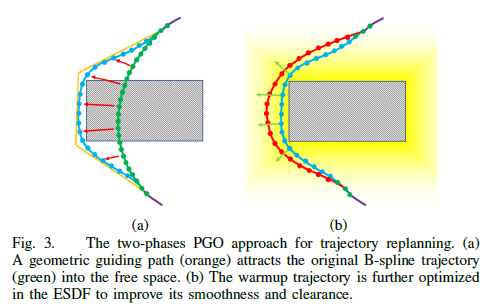
a图的绿色是初始B样条轨迹,橙色的是几何引导路径,几何引导路径把初始轨迹拉到没有碰撞的地方形成warmup 路径(蓝色),然后b图中,对warmup路径再进一步进行平滑度和净空度的优化,得到红色最终轨迹。这个几何引导路径通过A或者RRT等传统方法就可以得到,本文用的是采样的方法得到这条引导路径。
第一阶段的目标函数是:

这里 f s f_s fs是平滑度的约束,具体在第一版的fast planner里有描述:

f g f_g fg是引导路径和B样条路径之间的距离的惩罚函数:
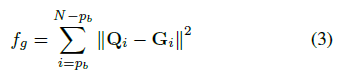
这里的 Q i Q_i Qi是B样条的控制点, G i G_i
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/542853
推荐阅读

相关标签

