
- 1Vue 3 和 Spring Boot 3 的操作流程和执行步骤详解_springboot3 + vue3
- 2NewSQL分布式数据库发展策略讨论_与newsql相关的综述性论文
- 3计算机网络——TCP/UDP_tcp提供面向字节流的传输服务,为实现流传输服务付出了大量开销
- 424数维杯C题18页保姆级思路+代码+后续参考论文_确定天然气水合物资源分布范围意义
- 5从入门到精通,大厂内部整理Android学习路线
- 6鸿蒙内核源码分析 (内核启动篇) | 从汇编到 main ()
- 7【水声通信】基于matlab OFDM-QPSK水声通信仿真(含误码率检测)【含Matlab源码 3954期】_现代水声通信原理与matlab应用
- 8Android Model引入其他aar包 导致无法打包成aar
- 9哈希表(散列表)——C++数据结构详解_哈希表数据结构代码c++
- 10Idea集成git
CAN总线新手入门 | 总结CAN总线的理解,帮助入门小白理解CAN网络_can数据长度不够
赞
踩
结合TSMaster总结CAN总线的理解,针对CAN总线一无所知的菜鸟入内,大佬请直接绕过!
首先CAN总线也是有硬件和软件组合的所以肯定用到有协议,当然也少不了OSI 7层模型。
目前我用到的就只有应用层,数据链路层,物理层的知识。
我就大致自上到下介绍一下,之后就可以去系统的学习CAN总线的知识,会更容易理解里边的概念!
一、总线介绍
关于CAN总线的介绍,如何发展,这个百度一下就很多,所以就不累赘了。只需要知道一下几点即可
1你只需要知道这个总线使用在汽车行业,是为了方便汽车控制器(ECU)之间通信的就可以了。
2 ISO11898是其中一个规定标准,定义了物理层,数据链路层的一些标准。
二、应用层
首先,我们发送一条报文,最少要有标识符(ID)和数据内容和数据长度(DLC)三部分。如下图

我们就可以定义出标识符的含义和每一个数据位对应数值的含义。例如001代表了车灯状态报文:
D0代表了前灯左的状态0代表灭,1代表亮。
D1代表了前灯右的状态0代表灭,1代表亮。
D2代表了后灯左的状态0代表灭,1代表亮。
D3代表了后灯右的状态0代表灭,1代表亮。
D4 D5 D6 D7 代表其他含义。
当其他的控制器在总线上接收到这条ID是001报文,就可以知道当前车辆四个灯的状态。
记住一下几点:
1、DLC长度代表了数据的长度,如果DLC是2,那么数据只有D0和D1。
2、ID不仅有功能含义,还有优先级作用。当有两个报文同事发送,ID小的先发送。
3、不同网络通道的报文不共享,通道1的报文只能接在通道1的ECU收到,其他通道收不到。(这里网络和通道的概念可以互换)
4、关于报文的类型可以是如下几个,CANFD是CAN总线的升级版。其他的和CAN总线类似,只是规定的协议不同而已。
5、应用层是自定义的,自己如何规定都可以,不是协议里定死的
三、数据链路层
数据链路层就是定义我们如何把上边的这一帧报文发送出去的。如何控制总线的状态,如何表示总线产生的错误。
数据格式有一下的几个,每个帧有不同的含义和特点,
• 数据帧
• 遥控帧
• 错误帧
• 过载帧
• 帧间隔
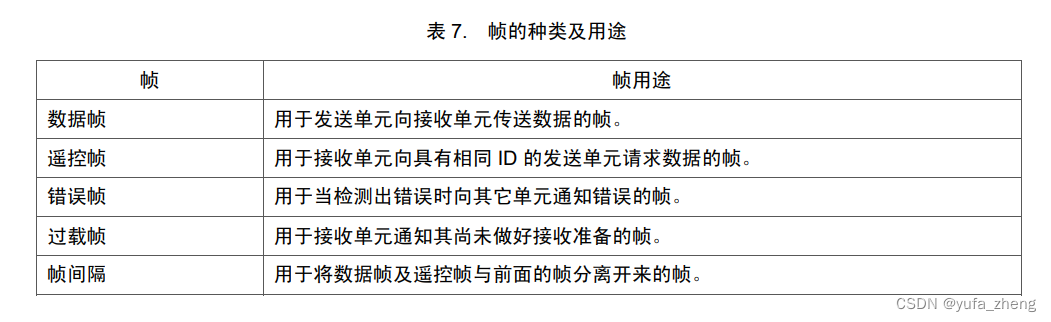
记不住就记住一个数据帧是用来发送数据的。下面是他的发送格式
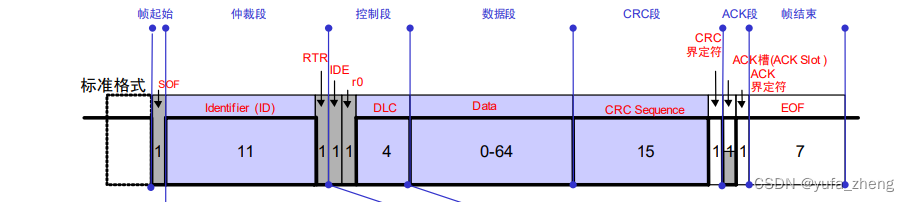
只需要记住:ID就是我们应用层的ID,DLC就是我们应用层的数据长度,Data是我们的数据。
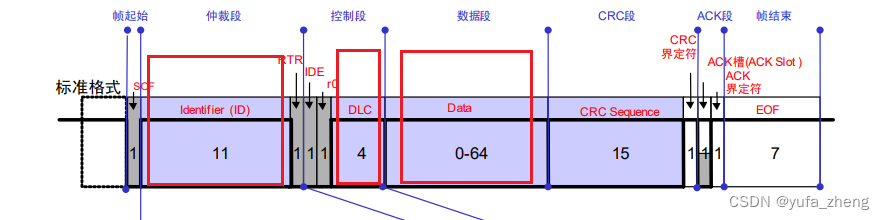
这里需要知道的知识有
1、当CRC校验错误的时候会产生CRC校验错误,如果发送了请求报文,没有回应。就会触发ACK错误,就是无应答错误。
2、我们的数据位占64个bit最大长度就是8个字节,同样DLC最大也只有8。
3、像的帧起始,帧结束。就是这个标准帧的开始和结束标志。
四、物理层
物理层就是规定了我们总线有几根线,每一根线电压是多少,如何去表示0和1的,最大的传输速率是多少等等。
也就是如何把我们数据链路层的数据帧0和1转变为高低电平的方式发送出。
这里需要知道的知识如下:
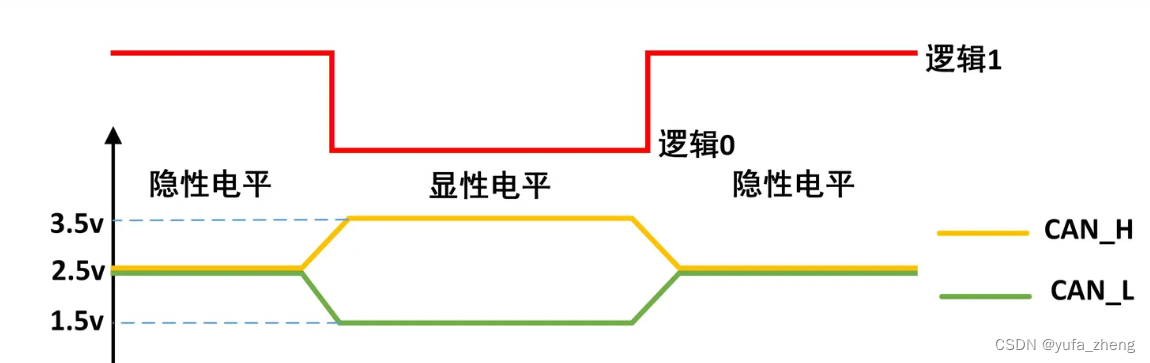
1、can 有两根线(双绞线),的电压是2.5最低为2,CAN_H - CAN_L的值代表0和1(查分信号)。
2、如果相减的值为0就是隐形电平相减的值为2就是显形电平。显性电平是逻辑0,隐形电平是逻辑1。
3、上图是ISO 11898协议的电压规定,ISO11519规定的就不相同。
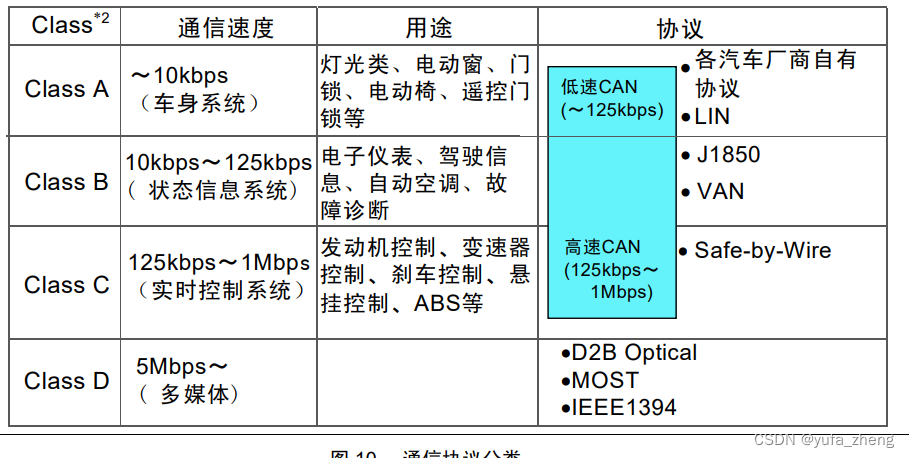
4、不同网络中 CAN的传输速度不同。
看到这里基本上脑海里有一个对CAN的轮廓了:
物理层:有两根通信线。
数据链路层:发送数据的帧格式。
应用层:ID DLC 和Data。
后面你只需要去看其他大佬的系统文档和视频就可以了!

