
热门标签
热门文章
- 1postgresql如何查询物化视图脚本内容_pgsql 查看物化视图语句
- 2语义分析基础知识_语义规则
- 3史上最强Excel模板 (680个文档)_680个excel模板
- 4计算机专业春招笔试+面试题(个人总结)_计算机专业应届生招聘技术面试题
- 5大数据技术之Hadoop(HDFS)_大数据hadoop
- 6解决Flask项目无法使用公网IP访问的问题_flask小demo放到阿里云无法访问
- 7VueX_映射的计算属性的名称与 state 的子节点名称相同是怎么样的
- 8Linux(Centos7)下配置Hadoop的环境以及启动其HDFS的详细教程_centos打开hadoop显示什么才是成功
- 9创建Github Pages 仓库
- 10git pull指令报错 error: You have not concluded your merge (MERGE_HEAD exists)._> git pull --tags origin master error: you have no
当前位置: article > 正文
ros机器人编程实践(15.3)- 使用科大讯飞语音控制turtlebot导航
作者:盐析白兔 | 2024-05-21 13:23:18
赞
踩
ros机器人编程实践(15.3)- 使用科大讯飞语音控制turtlebot导航
前言
上一篇博客:ros机器人编程实践(15.2)- 使用科大讯飞语音控制turtlebot导航
在上一篇博客中我们已经实现了语音控制turtlebot导航,这一节尝试实现turtlebot语音播报。
科大讯飞的语音合成测试
安装教程在这:传送门
rosrun xfei_asr tts_subscribe_speak
rostopic pub xfwords std_msgs/String "你好,世界!"
- 1
- 2
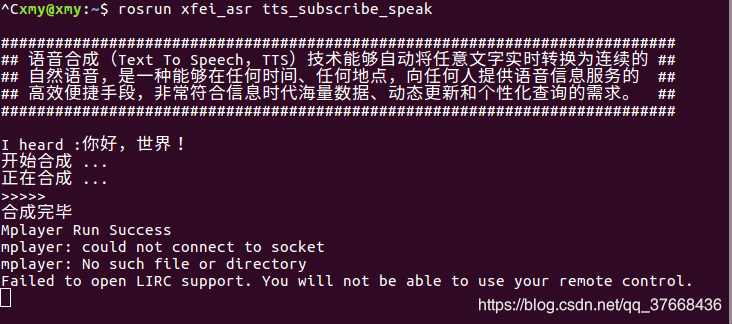
根据rostopic pub xfwords std_msgs/String "你好,世界!"我们可以看出语音合成节点接收的话题是xfwords,话题的消息类型是String。
修改语音导航脚本
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/602743
推荐阅读
相关标签

