
热门标签
热门文章
- 1anaconda安装python 3.11_anaconda配置python3.11
- 2百度世界大会2021:AI链接社会价值
- 3CNCC 技术论坛 | 知识图谱赋能数字经济
- 4SQL注入原理讲解,很不错!
- 5使用avrdude下载arduino程序到Atgema328pb中_mega328pb
- 6如何一次取消全部WORD文档里的所有超链接?_怎么一键移除文章的超链接
- 76框开源代码搜索引擎_搜索引擎框代码
- 8Windows子系统WSL2 (ubuntu安装 docker、nvidia-docker)_windows docker nvidia
- 9docker(基础命令,实践(mysql,redis集群,tomcat), 网络)_docker mysql tomcat
- 10python+UIAutomation简介_python uiautomation
当前位置: article > 正文
识别特定区域内有无物品_区域内有没有物体怎么识别
作者:盐析白兔 | 2024-05-31 10:45:12
赞
踩
区域内有没有物体怎么识别
ReadMe:运行本程序前需配置相应的文件、库等,请阅读程序了解详情。
0 功能
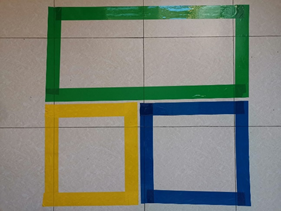
识别图片中绿色框内有无物体,且识别物体种类及获取其位置坐标与置信度。
图片样张如下,左、右分别为有饮料瓶和无饮料瓶的情况:

1 有饮料瓶的情况

Marking:读取图片

Res:绿色区域识别

Output:识别结果(Something)及置信度
2 无饮料瓶的情况

Marking:读取图片

Res:绿色区域识别

Output:识别结果(Nothing)
3 代码
没时间写注解,先把代码放这了。
#!/usr/bin/python # -*- coding: utf-8 -*- # python3.7 # author:Harden Qiu # Date: 2019/8/19 import cv2 import numpy as np def marking(img): lower = np.array([35, 43, 46], dtype="uint8") upper = np.array([77, 255, 255], dtype="uint8") converted = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) markingMask = cv2.inRange(converted, lower, upper) markingMask = cv2.GaussianBlur(markingMask, (5, 5), 0) marking = cv2.bitwise_and(img, img, mask=markingMask) return marking def main(): img_rgb = cv2.imread("./images/example_01.jpg") cv2.imshow("Marking",img_rgb) img_green = marking(img_rgb) img_gray = cv2.cvtColor(img_green, cv2.COLOR_BGR2GRAY) img_gray = cv2.GaussianBlur(img_gray, (5, 5), 0) ret, img_binary = cv2.threshold(img_gray, 50, 255, cv2.THRESH_BINARY) contours, hierarchy = cv2.findContours(img_binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) print("number of contours:%d" % len(contours)) cv2.drawContours(img_binary, contours, -1, (0, 0, 255), 2) area = [] for i in range(len(contours)): area.append(cv2.contourArea(contours[i])) max_idx = np.argmax(area) for i in range(max_idx - 1): cv2.fillConvexPoly(img_binary, contours[max_idx - 1], 0) cv2.fillConvexPoly(img_binary, contours[max_idx], 255) x, y, w, h = cv2.boundingRect(contours[max_idx]) cv2.rectangle(img_binary, (x, y), (x + w, y + h), (0, 255, 0), 2) rect = cv2.minAreaRect(contours[max_idx]) box = cv2.boxPoints(rect) box = np.int0(box) xmax = np.max([box[0][0], box[1][0], box[2][0], box[3][0]]) xmin = np.min([box[0][0], box[1][0], box[2][0], box[3][0]]) ymax = np.max([box[0][1], box[1][1], box[2][1], box[3][1]]) ymin = np.min([box[0][1], box[1][1], box[2][1], box[3][1]]) res_widths = abs(xmax - xmin) res_heights = abs(ymax - ymin) res = np.zeros([res_heights-50, res_widths-50, 3], np.uint8) Xmin = xmin Ymin = ymin para = 30 for xmin in range(para,res_widths-para): for ymin in range(para,res_heights-para): res[ymin-para, xmin-para] = img_rgb[ymin + Ymin, xmin + Xmin] cv2.imshow("Res", res) CLASSES = ["background", "aeroplane", "bicycle", "bird", "shelf", "bottle", "box", "robot", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"] COLORS = np.random.uniform(0, 255, size=(len(CLASSES), 3)) print("[INFO] loading model...") net = cv2.dnn.readNetFromCaffe("./MobileNetSSD_deploy.prototxt.txt", "./MobileNetSSD_deploy.caffemodel") print("------", res) (h, w) = res.shape[:2] blob = cv2.dnn.blobFromImage(cv2.resize(res, (300, 300)), 0.007843, (300, 300), 127.5) print("[INFO] computing object detections...") net.setInput(blob) detections = net.forward() for i in np.arange(0, detections.shape[2]): confidence = detections[0, 0, i, 2] idx = int(detections[0, 0, i, 1]) if CLASSES[idx] == "bottle": if confidence > 0.4: box = detections[0, 0, i, 3:7] * np.array([w, h, w, h]) (startX, startY, endX, endY) = box.astype("int") print("瓶子的位置:起始坐标(%d,%d)终点坐标(%d,%d)"% (startX, startY, endX, endY)) label = "Something--{}: {:.2f}%".format((startX, startY), confidence * 100) print("[有货物在货架上] {}".format(label)) cv2.rectangle(res, (startX, startY), (endX, endY), COLORS[idx], 2) y = startY - 15 if startY - 15 > 15 else startY + 15 cv2.putText(res, label, (startX, y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2) else: box = detections[0, 0, i, 3:7] * np.array([w, h, w, h]) (startX, startY, endX, endY) = box.astype("int") label = "Nothing" cv2.putText(res, label, (startX, y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2) cv2.imshow("Output", res) cv2.waitKey() cv2.destroyAllWindows() if __name__ == '__main__': main()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/651884
推荐阅读
相关标签

