
基于非线性模型预测控制的STM32MPC Target-Tracking UAV目标跟踪约束及casadi插件的应用_stm32 mpc算法
赞
踩
STM32MPC_Target-Tracking_UAV基于非线性模型预测控制的目标跟踪约束
matlab 需要插件casadi插件
仅供参考
有参考文件
ID:27315697830321684
馨儿佑儿
STM32MPC是一款基于非线性模型预测控制的目标跟踪约束的无人机(Unmanned Aerial Vehicle, UAV)系统。在该系统中,使用了STM32微控制器作为处理器,通过非线性模型预测控制的方法来实现对目标的跟踪约束控制。该系统的设计主要是为了提高无人机在目标跟踪任务中的精确度和稳定性。
在目标跟踪约束任务中,我们首先需要了解目标的位置和运动状态。为了实现这一目标,我们使用了matlab软件,并借助casadi插件来进行数据处理和分析。通过收集和分析目标的位置和运动状态数据,我们能够更准确地预测目标的下一步行动,并相应地调整无人机的飞行路径和姿态。
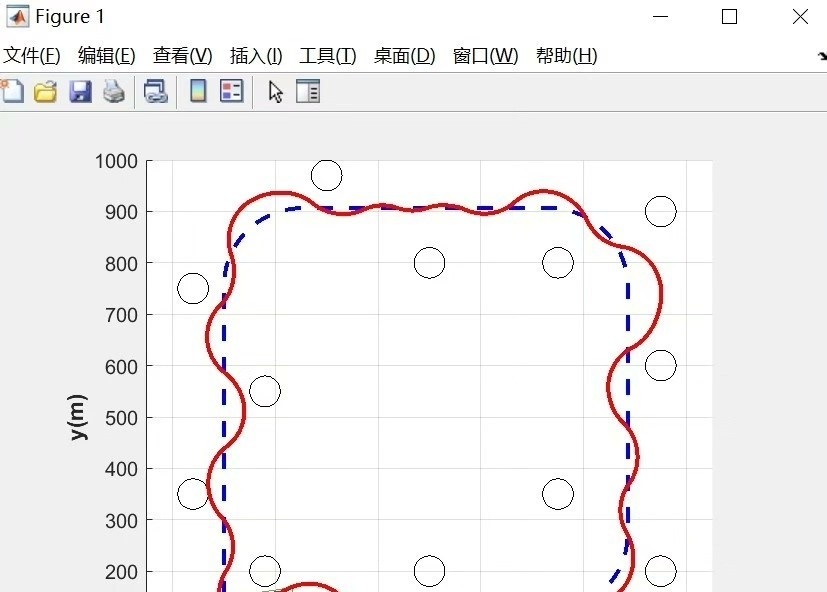
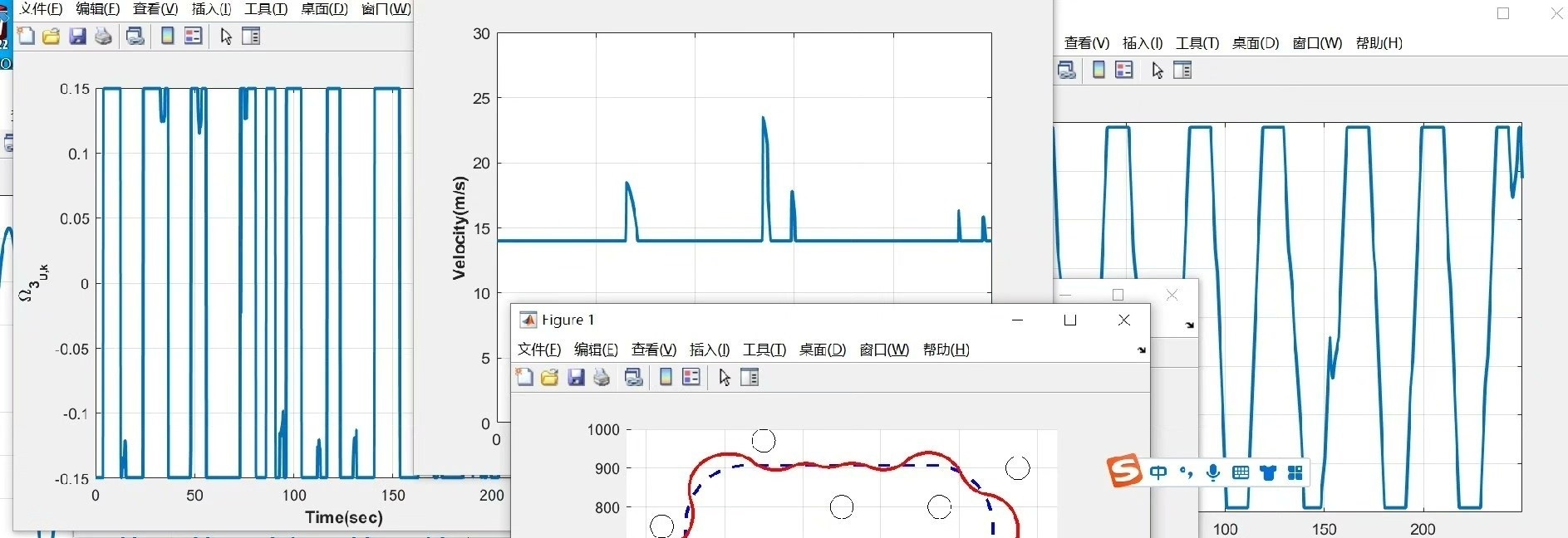
在STM32MPC系统中,我们实现了一个非线性模型预测控制器。该控制器能够根据当前目标的位置和运动状态,通过模型预测方法来预测目标的未来位置。在此基础上,控制器会生成一系列控制信号,以约束无人机的运动轨迹,使其与目标保持一定的距离和角度。
为了实现目标跟踪约束,我们将目标的位置和运动状态作为输入,经过预处理和建模,生成模型预测的结果。然后,我们使用反馈控制的方法来实现对无人机的控制。通过持续地对模型预测结果和目标状态进行更新和调整,我们能够在一定程度上保证无人机能够稳定地跟踪目标,并且在遇到突发情况时能够及时做出反应。
除了基本的目标跟踪约束功能外,STM32MPC系统还具备一些其他的特性。例如,我们可以通过增加传感器模块来增强无人机对环境的感知能力,使其能够更好地适应不同场景下的目标跟踪任务。此外,我们还可以通过改变模型预测控制器的参数和算法来实现不同的控制效果,以满足不同的应用需求。
总之,STM32MPC是一款基于非线性模型预测控制的目标跟踪约束的无人机系统。通过使用matlab软件和casadi插件,我们能够更精确地预测和控制目标的运动,从而实现无人机对目标的稳定跟踪。该系统具备多种特性和扩展功能,可根据实际需求进行定制和优化。在未来的发展中,我们将进一步改进和完善这一系统,以满足不断变化的技术和市场需求。
请注意,以上内容仅供参考,具体实施细节和效果可能会受到多种因素的影响。在实际应用中,请根据具体情况进行详细的设计和测试,并参考相关文献和资料以确保系统的性能和安全性。
【相关代码 程序地址】: http://nodep.cn/697830321684.html


