
- 1Python中的iter()与next()函数_calliter.__next__()
- 2Zabbix绘制流量拓扑图_zabbix 流量地图
- 3Anaconda3 下载安装及不同python环境配置(Linux/Windows)_如何下载到指定python版本的anaconda
- 4基于YOLOv8/YOLOv7/YOLOv6/YOLOv5的智能监考系统(Python+PySide6界面+训练代码)
- 52022完整版:云计算面试题和答案(学习复习资料)_云计算售前面试
- 6pip换源命令(一行命令完成)
- 7Python打包exe和生成安装程序_python生产安装包
- 8Java项目:博客论坛管理系统(java+SpringBoot+JSP+LayUI+maven+mysql)_layui制作论坛列表带内容系统
- 9黑客爱用的HOOK技术大揭秘!_hook计算机是什么意思
- 10在 Java 中实现单例模式通常有两种方法_java两种单例创建
数字孪生中的人工智能——技术现状、挑战和未来研究课题_digital twin for 5g and beyond
赞
踩
作者:吕志涵、谢淑轩(音译)
摘要
随着数字化进程的推进,大数据、人工智能(AI)、云计算、数字孪生、边缘计算等先进的计算机技术已应用于各个领域。为研究数字孪生与AI结合的应用现状,本文通过研究当前已发表文献的研究成果,对AI在数字孪生中的应用和前景进行了分类。本文从航空航天、生产车间智能制造、无人驾驶汽车、智慧城市交通四大领域探讨了数字孪生体的应用现状,并回顾了当前面临的挑战和未来需要期待的话题。研究发现,数字孪生与AI的融合在航空航天飞行探测仿真、故障预警、飞机组装甚至无人飞行方面具有显著效果。在汽车自动驾驶的虚拟仿真测试中,可以节省80%的时间和成本,相同的路况降低了实际车辆动力学模型的参数尺度,大大提高了测试精度。在生产车间的智能制造中,建立虚拟工作场所环境可以提供及时的故障预警,延长设备的使用寿命,确保车间整体运行安全。在智慧城市交通中,模拟真实的道路环境,恢复交通事故,使交通状况清晰高效,快速准确地进行城市交通管理。最后,我们展望了数字孪生和人工智能的未来,希望为未来相关领域的研究提供参考。
介绍
数字孪生(DT)最重要的灵感来自真实物理系统和数字网络空间模型之间反馈的需求[1]。人们试图在数字空间中重现物质世界中发生的事情。只有使用循环反馈的全生命周期跟踪才是整个生命周期的真正概念[2]–[4]。通过这种方式,可以在整个生命周期中真正确保与物质世界的数字一致性。基于数字模型的各种模拟、分析、数据积累、挖掘,甚至人工智能应用,都可以确保它适用于真实的物理系统[5]–[7]。智能系统的智能必须首先被观察、建模、评估和推理。如果数字孪生体没有对实际生产系统的准确建模描述,就无法实现智能制造系统[8]。
基于机器学习(ML)的AI应用程序通常被认为是制造业中一项有前途的技术[9]。然而,ML方法需要大量高质量的训练数据集。在监督式 ML 的情况下,通常需要手动输入来标记这些数据集[10]。这种方法成本高、容易出错且耗时,尤其是在复杂而动态的制造环境中[11]。阿列克斯普等人(2020)[12]指出数字孪生模型可以通过生成适当的训练数据集并通过模拟工具链自动标记来加速ML训练阶段,从而减少用户对训练过程的参与。这些合成数据集可以使用不需要大量使用的广泛真实世界数据进行扩展和交叉验证。范等人(2021)[13]研究并提出灾难城市数字孪生概念的愿景,该概念可以实现信息和通信技术(ICT)在危机信息学和灾难响应中的跨学科集成。这涉及结合人工智能算法和方法,以加强不同利益相关者之间的情况评估、决策和协调,从而提高对复杂灾害响应和人道主义援助动态的可见性。根据拉希德等人的(2019)[14]研究,数字孪生是复杂系统的自适应模型。计算管道、多物理场求解器、人工智能、大数据控制论、数据处理和管理工具的最新发展使数字孪生的前景及其对社会的影响更接近现实。数字孪生目前在广泛的应用中是一个显著上升的趋势。也称为计算巨型模型、设备影子、镜像系统、化身或同步虚拟原型。因此,数字孪生不仅在我们如何构建和管理网络物理智能系统方面发挥着变革性的作用,而且在我们如何促进多学科系统的模块化以解决基本障碍方面也发挥着变革作用。
本文旨在综述数字孪生结合人工智能技术在各个领域的应用现状,以及当前面临的挑战和未来需要研究的课题。我们希望为数字孪生在各行业的应用研究提供理论依据,并具有一定的启发性效果。
数字孪生中人工智能技术的研究现状
数字孪生中的人工智能
密歇根大学的Michael Grieves教授博士在2003年[15]首次提出了数字孪生的概念。它也被称为数字镜像和数字映射。它是一个物理对物理世界或数字表达的系统。理解它在虚拟世界中是简单明了的。在现实世界中复制真实事物是一个超越现实的概念[15]。它是一个数字仿真过程,使用物理模型、传感器设备和历史操作数据集成了多个学科、物理量、尺度和概率。据Gartner称,数字孪生是2019年十大关键技术趋势之一。据估计,到2020年,将有超过200亿个传感器和终端连接起来,数字孪生将连接数十亿个物理设备,试图在虚拟世界中尽可能多地模拟物理世界的实际情况。[3]、[16]、[17]。这一预测已经得到验证,笔者认为,2021年该技术将使用更多的传感器和终端设备。由于数字孪生的优势越来越突出,数字孪生的研究领域多样,主要集中在计算机集成制造领域,发展过程经历了多个阶段[18],如下图 1所示。
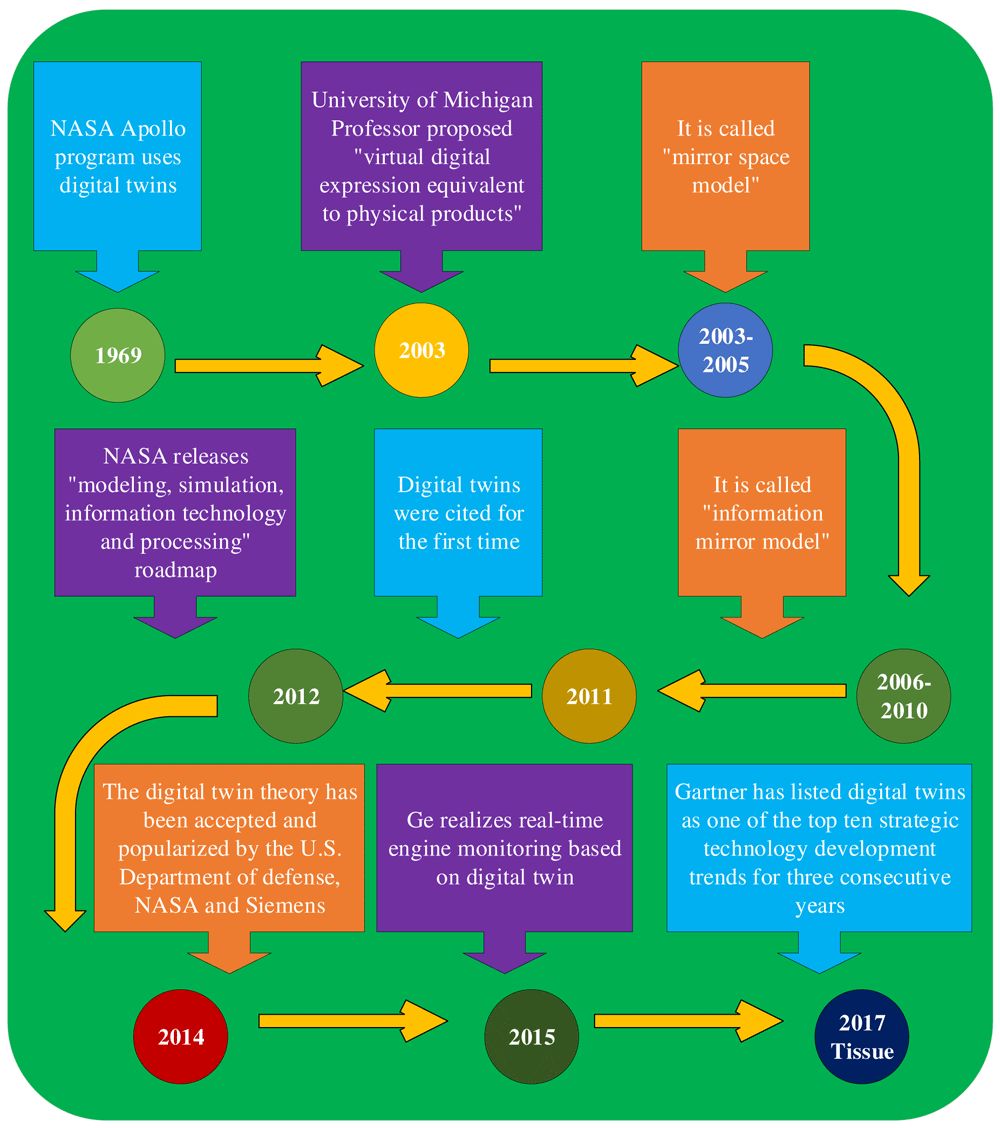
图 1.数字孪生的发展历史
数据采集、数据建模和数据应用是数字孪生的三个主要方面。数据采集是指充分利用卫星遥感、倾斜航空摄影测量、激光雷达测量、相机等技术,从完整的物理空间场景中获取三维数据[19]。传感器的功能是获取现实世界中不同种类的真实数据[20]。数据收集的技术难点和关键是数据收集的高精度和高效率,这决定了数据收集的质量、效率和成本。
在获取大量原始物理世界数据后,进行数据建模,并利用自动建模工具进行进一步处理,生成物理世界实际恢复的三维模型。除了环境的高精度虚拟重建外,数字孪生数据在支持各种操作流程方面也更有效。数据建模可分为两部分:可视化3D建模[21]和语义建模[22]。可视化 3D 建模是对物理世界的 3D 再现。数字孪生的语义建模包括“结构化”收集的数据并识别车辆、道路、人员和内部对象等对象。映射概念如图2 所示。
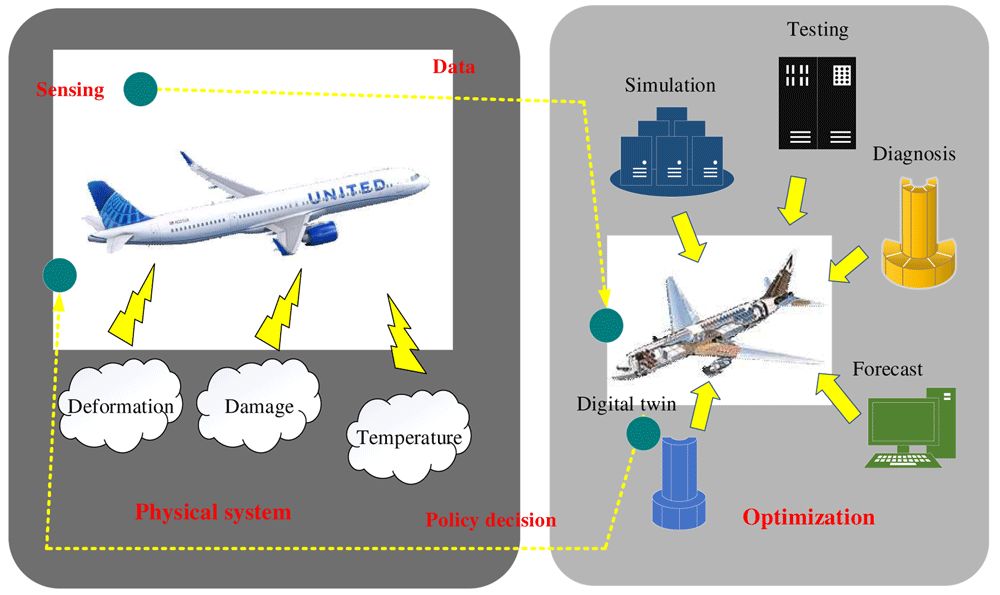
图2.数字孪生的概念
人工智能作为计算机科学的一门学科,不仅改变了我们的生活,也改变了许多行业。它试图理解智能的基础,以便创造一种新的智能机器,能够以类似于人类智能的方式做出反应。机器人、语言识别、图像识别、自然语言处理和专家系统都是该学科的研究领域[23]。计算机、机器人、经济和政治决策、控制系统和模拟系统都采用人工智能。如图3所示,它正在悄悄地改变我们的生活方式。我们可以使用地图软件来避免外出开车时的拥堵;我们佩戴的智能手表可以帮助我们监测和预测健康风险;我们家里的机器人可以用父母的声音给我们的宝宝讲故事;我们的扫地机器人可以轻松清洁大型复式房屋。将人工智能与数字孪生相结合将在我们生活的方方面面产生难以想象的变化[24]–[26]。
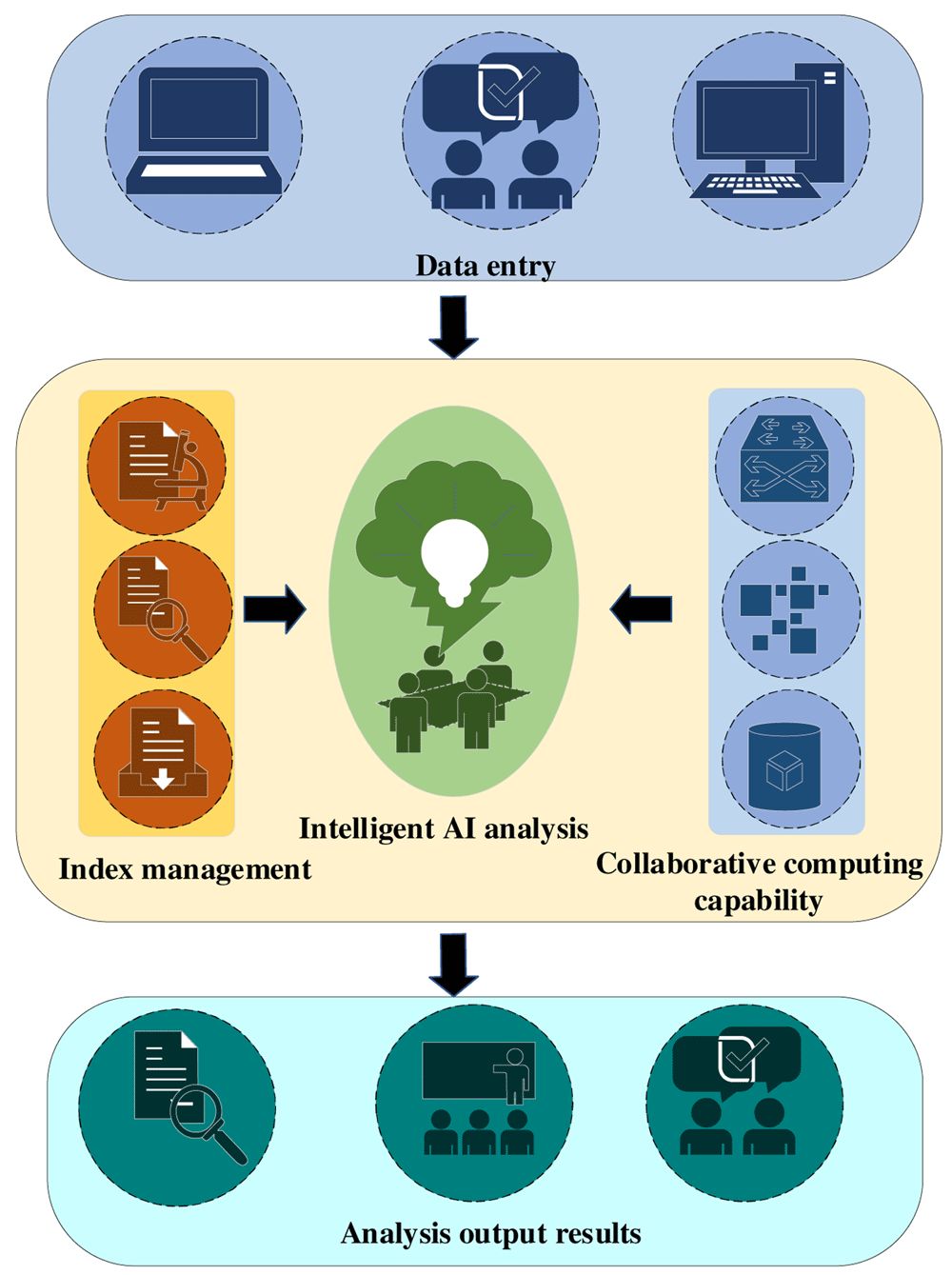
图3.人工智能在数字孪生生态仿真分析中的应用
基于数字孪生的AI技术应用现状
数字孪生中的人工智能是一个普遍适用的理论和技术体系,应用广泛,如产品设计、设备制造、医学分析、航空航天等领域。目前,我国应用最深入的是工程建设领域,智能制造在研究领域获得了最大的吸引力。应用领域的分类图如图4所示。
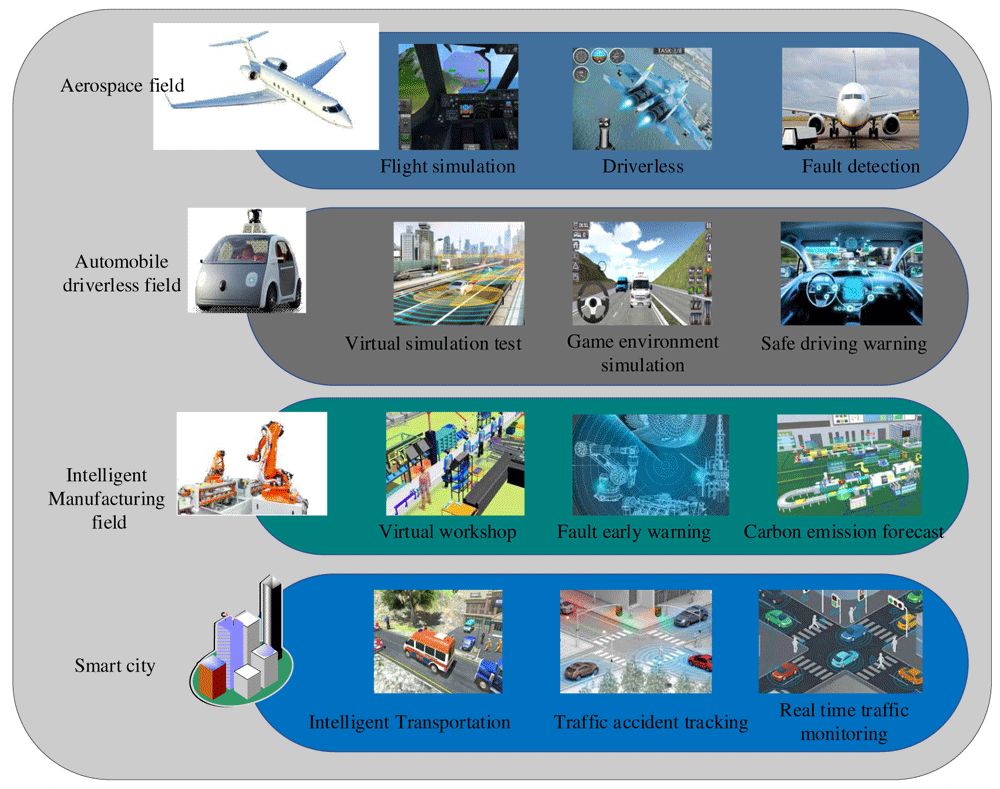
图4.数字孪生中人工智能应用领域的分类
数字孪生在航空航天领域的使用。数字孪生的概念最初是为了在航空航天领域使用而提出的。例如,数字孪生用于飞行模拟和航空航天飞行机器的维护和质量保证过程[27]。在数字空间中建立真实的飞机模型,然后利用传感器对数字空间进行整合。飞机的状态与现实中飞行飞机的状态同步。通过这种方式,每架飞机起飞和降落的过程都被模拟并存储在数字空间中。通过数字空间的数据分析,可以清楚地了解飞机是否需要维护,是否可以进行下一次飞行[27]–[29]。
尤尔克维奇等人的研究目的(2021)[30]是开发用于数字空中交通管制的神经模型。该方法采用分布式组织和技术系统的物理自组织社交网络的概念,其组件连接到无线4G和5G网络。这种方法的优点是分析和管理的原理非常有前途,并且与混合人工智能具有复杂的集成。
戴等人(2021)[31]表明自动驾驶无人机(UAV)系统作为安全关键系统,需要不断提高其可靠性和安全性。另一方面,测试复杂的自动驾驶控制系统是一个时间和金钱密集型项目,需要在项目增长期间进行多次外部飞行测试[32]。因此,提出了一种自动驾驶平台内部自动化测试系统,以提高无人机开发的效率和安全性[33]。随着无人驾驶飞机技术的发展,无人驾驶飞机的应用越来越多,并被视为未来智慧城市基础设施的重要组成部分[34]–[36]。同时,与基于无人机的应用程序相关的安全和隐私威胁需要适当的测试和监视技术。对于一个在通用无人机架构上促进基于无人机的应用程序的管理和性能的平台,Grigoropoulos等人(2020)[37]提供模拟环境和数字孪生支持。首先,仿真环境可以对平台本身和平台上运行的应用程序的功能进行深入测试,然后可以部署到现实世界中。部署后,数字孪生用于发现应用程序之间的差距和预期行为,从而在执行仿真测试或未发现故障时用作错误指示器。维护已经从“事后维护”和“预防性维护”演变为“预测性维护”,使其成为航空业最关键的组成部分之一。精准维护是未来的发展路径,目的是保证运行安全,降低协同优化目标和运营成本[38]。为了提高发动机预测性维护的效果,熊等人(2020)[39]研究了数字孪生驱动的飞机发动机预测性维护框架,发现了隐式数字孪生IDT(隐式数字孪生)模型。模型的有效性是通过评估虚拟和实际数据资产的一致性来确定的。通过集成数据驱动的深度学习(DL)方法[40]证明了该方法的有效性。使用LSTM(长短期记忆)模型[41]并以航空发动机为例。
如图5所示,与其他行业相比,飞机总成具有结构复杂、零件数量庞大、对产品空气动力学形状要求极其严格等特点[42]。因此,必须使用专业的装配架,以确保零件在安装过程中不会受到人为因素的影响,从而导致变形和装配错误的问题[43]。仅以传统的工程图纸进行工艺设计和生产装配为基础,很难保证严格的精度要求。数字孪生技术的出现为飞机装配过程与现场信息反馈控制之间及时有效的交互提供了可能性[44]。梁等人(2020)[45]指出飞机核心部件和数字孪生的全场位移感知在精密生产(如航空制造)中起着至关重要的作用。在研究中,提出了一种结合在线多点位移监测与矩阵完备理论相结合的实时全场位移传感方法,建立了基于多点观测信息的全场位移感知概念模型。HPP(高精度产品)[46]是一种多学科耦合的高精度产品,经常应用于航空航天、海洋、化工等行业。正是因为HPP的内芯复杂而紧凑,而包含跨学科耦合的装配过程对精度要求很高。依靠手工经验的传统装配方法效率低下,质量不一致。针对上述问题,孙等人(2020)[47]研究并提出了一种数字孪生驱动的HPP组装和调试方法。提供了数字孪生驱动装配与调试的理论架构,以及基于数字孪生技术的装配与调试全元信息模型构建方法。
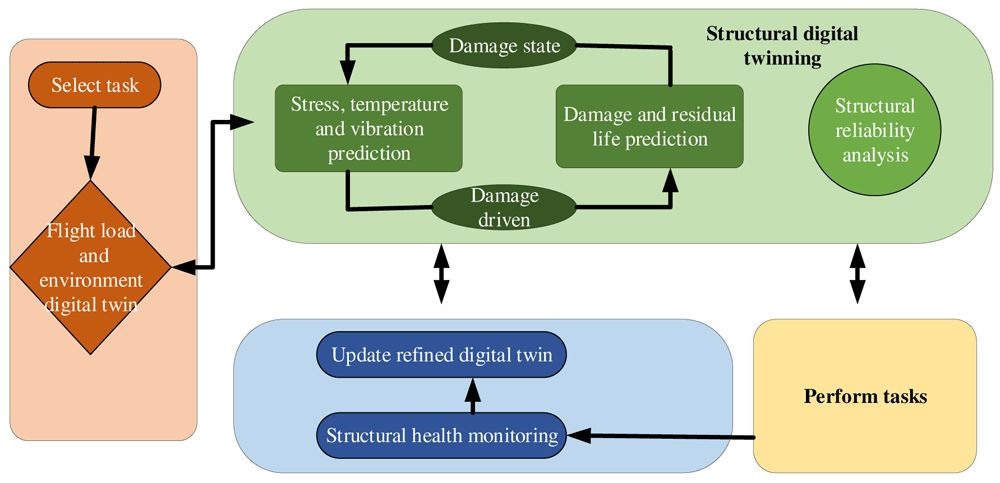
图5.基于数字孪生的飞行寿命预测
针对民用航空器质量偏差控制系统存在的问题,质量偏差控制数据分散在众多管理系统中,无法从有关航空器整个生命周期中收集质量数据相关信息;缺乏用于质量数据分析和质量偏差控制的闭环网络物理融合系统[48]。因此,定位质量偏差问题很困难,处理这些问题需要很长时间。蔡等人(2021)[48]研究并提出了基于数字孪生的质量偏差控制模型。利用基于资产管理技术的数字孪生建模,检索和合并多源异构定性偏差数据,构建质量偏差体系。该系统采用FP-growth关联规则算法对飞机质量偏差数据进行评估,系统可以提供结果,以辅助装配现场,并最大限度地提高在现实世界中纠正质量问题的性能和正确性[49]。
根据上述讨论,数字孪生在航空航天工业中提供了广泛的用途,包括飞机飞行路线的数字模拟,故障和维修的及时报告以及无人机性能的测试。这些领域取得了重大突破和进展。
数字孪生在自动驾驶智能化中的应用。随着深度学习和大数据分析技术的进步,人工智能应用正在迅速发展。其中,必须使用人工智能算法开发自动驾驶系统。在现实生活中,自动驾驶技术可以减少交通事故,实现时空等资源利用的效率,甚至为残疾人的驾驶过程提供极大的便利。然而,由于自动驾驶的技术要求很高,在虚拟仿真环境中对数字孪生进行模拟驾驶的需求已成为不可或缺的一步[50]。
在自动驾驶汽车真正上路之前,必须经过严格的虚拟仿真测试,以确保安全[51]。在传统的虚拟仿真测试环境中,HTL(高阈值逻辑)设备[52]通常用于安全和主动性能测试。但在这种测试中,只有控制器是真实的,其他因素,如驾驶员、变速箱、动力、道路环境和其他与控制器相关的内容都是在虚拟环境中模拟的。由于目前计算机水平有限,仿真环境不能设置得太复杂,所以被测车对象的性能不是那么准确,测试精度有一定的偏差。当然,在真实环境中进行测试无疑是最好的选择,但由于物理条件的各种限制,不可能每次都保持统一的测试场景。因此,应实施基于数字孪生技术与实际道路环境相结合的自动驾驶仿真测试测试评估系统]53]。数字孪生测试架构图如图6所示。
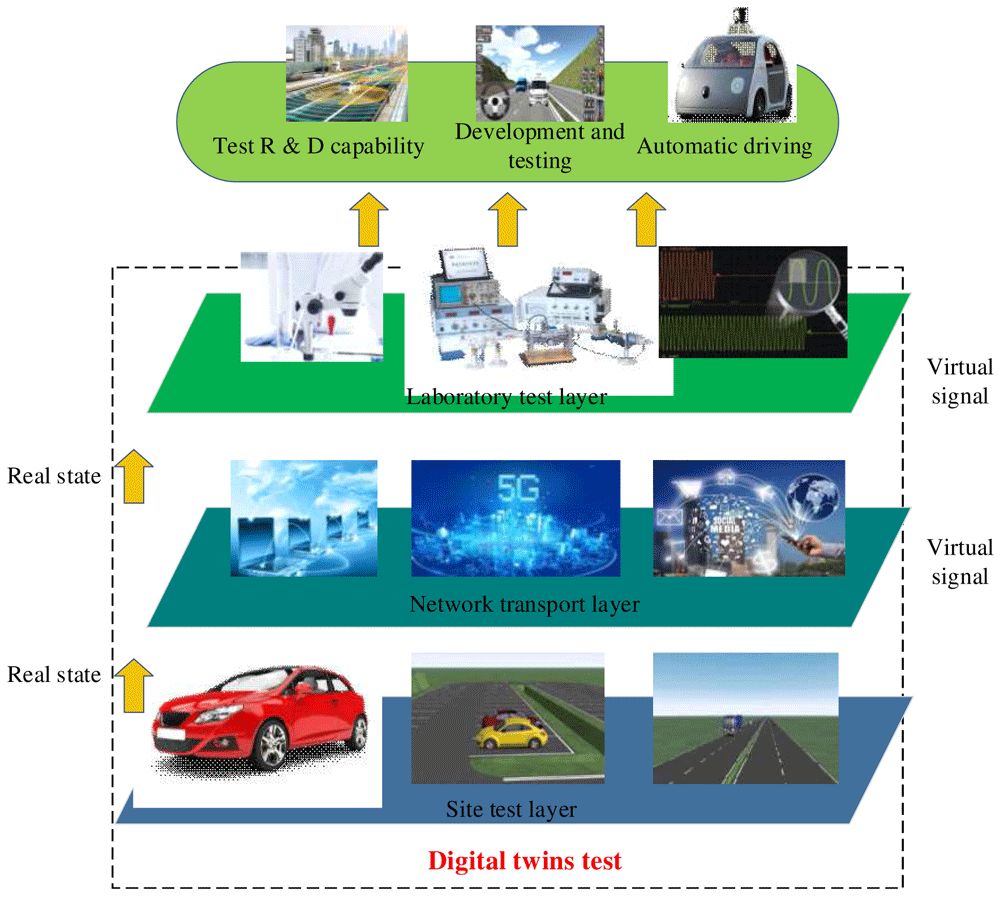
图6.自动驾驶数字孪生虚拟场景测试的整体架构
拉林等人(2019)[54]指出,基于物联网(IoT)技术的自动驾驶汽车的目标是整合互联汽车,并将它们变成可以自动移动的“物体”。该技术面临的重要挑战之一是确保各种组件和物联网系统的兼容性,例如为车辆和道路设备以及传感器提供服务。采用的解决方案是使用物联网领域的国际标准化组织联合物联网平台和oneM2M互操作性平台,以确保所有组件之间的通信没有障碍。阿尔梅贝等人(2021)[55]指出,数字化转型时代带来的新工业革命使得在制造和运输过程中使用越来越多的人工智能和自动化技术成为可能。数字孪生概念在自动驾驶汽车上的应用得益于数字时代推动的结果。而且,确保自动驾驶汽车的安全可以有效减少交通事故的发生。此外,在驾驶时保持驾驶员与行人之间的安全距离也有显著的好处。
为使能智能制造安全运输系统,实现端到端运输模式,研究提出采用全新的安全设计,增强整个自动驾驶系统的灵活性和安全性。云等人的研究.(2021)[56]指出,基于数字孪生的计算机仿真是自动驾驶汽车设计中不可或缺的一步。但是,要设计出与真实路况完全相同的模拟环境需要付出很多努力,而且成本效益非常低,因为必须实现很多东西。在这项研究中,提出了一种使用网络游戏“GTA5”(侠盗猎车手V)作为自动驾驶汽车模拟基础的方法。GTA5 在线游戏可以用作适当的模拟工具,因为它具有一系列理想的物品、行人和高速公路。通过使用OpenCV捕获GTA5游戏屏幕[57]并用Python的YOLO分析它(你只活一次)[58]和张量流[59],通过设计算法可以建立高精度的物体识别系统,避免物体碰撞和不同车道识别。
将数字孪生应用于自动驾驶领域,城市或市级数字孪生数据可以作为高精度地图,即汽车运行的基础环境数据。笔者认为,汽车制造商、自动驾驶设备制造商和综合解决方案提供商都需要这项技术的普及。一方面,由于自动驾驶的测试环境非常有限且成本高昂,数字孪生可以为客户提供自动驾驶仿真系统作为解决方案。使用虚拟仿真的自动驾驶系统可以验证传感器性能和车辆算法的可靠性。另一方面,它可以作为实际自动驾驶环境中的映射数据之一。汽车制造商可以使用数字测试场对车辆性能进行虚拟测试,例如车辆动力学、舒适性和耐用性。虚拟测试轨道是在地面上进行测试的道路。虚拟环境和真实场景要求尽可能逼真,包括固定车辆、路标、行人、斑马线、障碍物、移动车辆以及场景中的车道数。当然,随着自动驾驶领域技术的不断提升,对虚拟测试场景的技术复杂度的要求也越来越高,因此我们需要开发更完整的架构。
因此,通过数字孪生自动驾驶测试至少可以节省80%的时间成本,并且可以重复测试相同的路况,从而减少了实际车辆动力学模型的参数尺度,大大提高了测试结果的准确性[54]。笔者认为,在虚拟场景中操作的过程可以避免真实交通条件下可能发生的事故概率,还可以减少不必要的物质损失,从而降低企业成本。因此,数字孪生在自动驾驶领域的使用为汽车制造和性能测试开辟了新的思路。
数字孪生在智能制造中的应用。随着世界各国智能制造技术的不断发展,制造业的信息化水平正在逐步提高。为了提高产品生产率,及时处理生产过程中的突发事件,企业必须加强生产车间各模块的管理和控制措施,提高企业对生产过程的控制能力。而且,消费者对产品的个性化要求更高,导致企业在生产过程中面临大量的数据、数据需求和数据结构,这使得企业难以管理和分析数据。因此,在制造过程中,如何有效及时地反馈生产车间设备的使用状态和故障预警,成为当前智能制造行业的一大难题。
大数据、人工智能、物联网、边缘计算等现代先进信息技术的发展,推动了传统制造向智能制造的转型。智能制造最关键的特点是自主性和主动自我优化。周等人(2020)[60]研究并提出了面向智能制造的数字孪生制造单元转型的知识驱动系统框架,可以智能感知、模拟、理解、预测、优化和控制。它不仅可以最大限度地提高产品质量,还可以降低生产成本。智能制造与其说是传统制造业面临的挑战,不如说是机遇。智能制造的可持续性特征更加明显。李等人(2020)[61]研究如何构建面向智能制造项目的可持续发展评价数字孪生驱动系统,并基于经典数字双映射系统开发了数字孪生驱动系统。信息架构是智能制造项目可持续增长的关键解决方案。随着传感器技术和数据处理的进步,基于信息物理系统的智能制造已成为制造业发展的主要趋势。鉴于离散生产车间的多样性和波动性,控制制造工作场所的碳排放存在某些问题。张等人(2019)[62]研究并提出了智能制造车间数字孪生驱动的碳排放预测控制模型,该模型结合了最新的计算机技术和低碳控制技术,在虚拟车间中对模型进行了验证和优化。
数字孪生车间是智能制造的核心组成部分。它们由实体车间、虚拟车间、车间服务系统和车间孪生数据组成,其中虚拟车间是最重要的组成部分。虚拟车间的建设从三个方向开始,由几个要素组成:使用虚拟数字几何模型来表示车间的环境元素,包括车间人员、机器、产品等。行为要素包括车间内设备的速度轨迹和不同的生产指令等生产要素,模拟车间内设备的运行状态。规则元素利用车间现有的物理环境对生产过程进行评估、分析、预测和优化,实现虚拟车间的建立。如图7 所示。在实际生产过程中,设备故障时有发生,影响生产进度和成本。如果在故障发生后进行维修,往往很困难,需要大量的人力物力进行故障筛选。因此,对设备的故障和设备的使用寿命进行预警尤为重要。
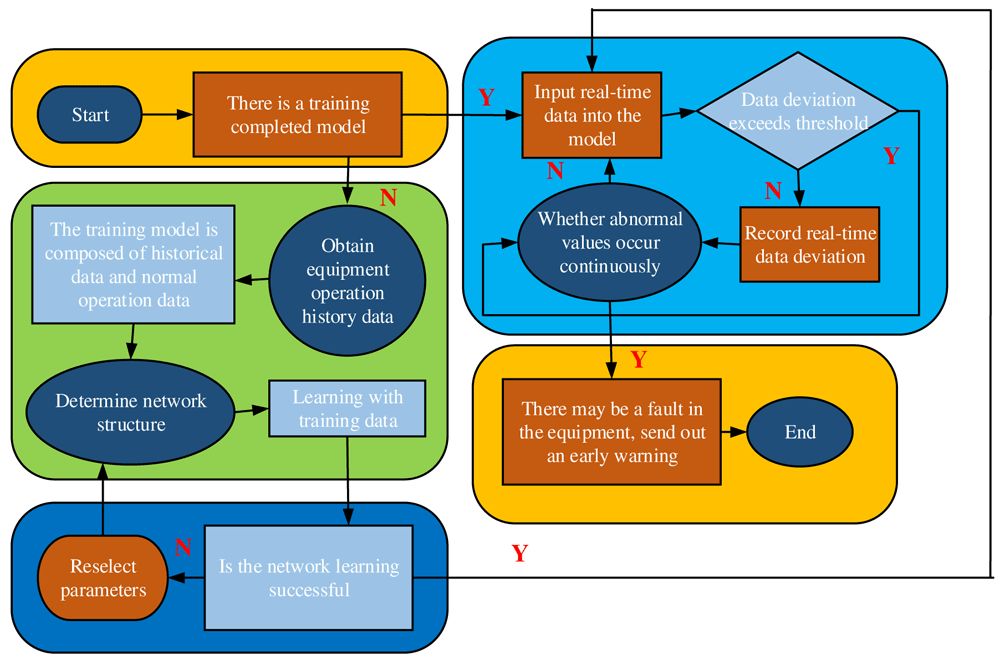
图7.虚拟车间设备故障预警示意图
赵等人的研究(2019)[63]针对数字孪生车间的实时视觉监控,提出了一种基于车间实时数据的三维视觉监控方法。研究了数字孪生工作场所与三维可视化实时监控之间的交互作用。提出了一种多级可视化监控模式和实时数据驱动的虚拟车间运行模式。该文详细介绍了车间几何建模、车间实时数据管理、车间多级三维可视化监控、车间状态板施工方法。通过实际算例验证了所提方法的有效性。吴等人的研究(2019)[64]指出,车间生产线在智能车间设备的基础上,结合关键数字化技术的运用。主要采用虚实数据同步通信和虚实映射技术,实现物理实体数字仿真的超现实虚拟实时。车间中的物品可以根据实际应用进行开发,并且可以在内部构建智能车间的虚拟模型。作业车间调度在生产过程中始终至关重要,也是影响制造效率的最关键因素之一。在实际生产调度过程中存在一些未知事件、信息不对称、异常干扰等,会产生执行偏差,损害调度执行的效率和质量。传统的调度策略不足以有效解决这些问题。方等人(2019)[65]提出针对数字孪生的兴起,具有虚拟现实交互、实时映射和共生进化的特点,提出一种基于数字孪生的作业车间调度新方法,以减少调度偏差。
基于以上研究,可以证明数字孪生在智能制造领域取得了突破,尤其是虚拟车间的使用,可以大大降低设备故障的概率,还可以帮助员工及时调整车间的整体调度,提高设备生产效率。数字孪生技术可以在智能制造领域实现产品、制造过程乃至整个工厂的虚拟仿真,从而提高产品研发和制造企业制造的生产效率。此外,它还可以在虚拟三维空间中创建产品。通过修改各种尺寸和装配关系的零部件和产品,可以大大简化产品几何验证工作、装配可行性验证工作和工艺实施。同时,在迭代过程中物理原型的制造时间、时间和成本大大降低。
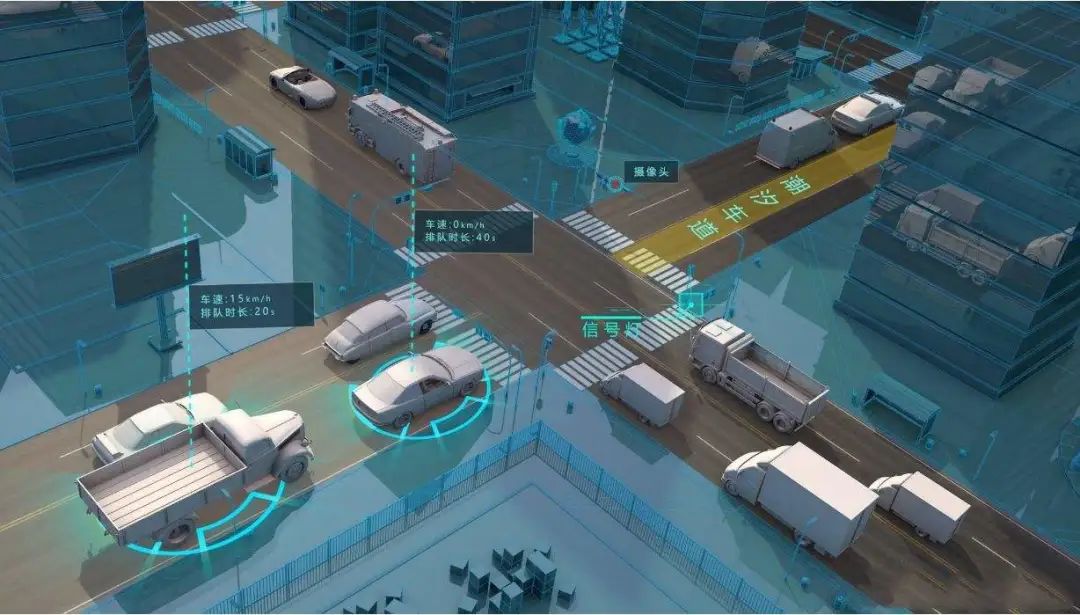
数字孪生在智慧城市中的使用。数字孪生的概念就是将现实世界中的人、物、关系、过程映射到虚拟世界,通过对虚拟空间中的数字孪生进行观察和分析,实现对真实物体的研究和控制。将这一概念应用于城市交通领域,无疑是智慧城市建设的福音,这反映在图8中。城区的主要功能区管理是以空间控制为主要目标,促进城市和区域发展的空间组织和策略。高等人的研究(2017)[66]表明:根据大数据和GIS(地理信息系统)对城市功能区建设方案进行优化分析。城市功能区管理的首要目标是限制或规范土地的合理利用,为城市区域的高效利用奠定基础。城市规划的主要依据包括区域对资源环境的承载能力、现有区域发展的密度数据、未来区域增长可能性等相关指标。借助GIS技术,建筑师可以更好地优化城市场所的功能位置。智慧交通是利用视频监控、融合毫米波雷达、机动车、非机动车、行人等交通要素的全息感知,实现数字空间中真实交通系统地图模型的构建。通过实时分析和跟踪,可有效解决交通资源浪费、信号系统功能刚性、交通事故变幻莫测、交通问题快速响应等问题[67]。数字孪生在智慧交通中的应用可以分为三个方向:提高无人驾驶训练效率、辅助交通事故分析和辅助交通控制[68]。
图8.数字孪生智慧城市示意图
数字孪生提高无人驾驶培训效率[68]。目前,智能研究中心正在开展智能无人驾驶虚拟训练系统研究,为无人驾驶汽车驾驶算法的道路驾驶安全和智能驾驶能力提供开放的虚拟测试和培训平台。这类项目的目标是在数字空间中再现真实的交通场景,通过广义衍生技术为无人驾驶车辆创造极端环境和关键高风险场景,大幅提升无人驾驶训练的有效性。
基于对静态和动态数据的感知,我们可以创建数字孪生模型,实现基于孪生数据的场景再现,帮助无人驾驶车辆进行虚拟测试和训练。但是,仅仅为数字孪生体提供高保真场景是不够的。更重要的是推导和概括双场景,不断丰富无人车的测试场景。马夫罗马蒂斯等人的研究(2020)[69]说明在人工智能彻底改变了推理、预测和判断任务的世界里,数字孪生成为了影响游戏平衡的工具。一个典型的例子是CITS(协作智能交通系统)的创建和改进,这是网络物理数字基础设施和(半)自动化移动的集成。导数泛化是数字孪生技术的关键。它必须从现实中衍生出来,但也必须高于现实,并对现实做出一些改变。巴蒂等人(2020)[70]指出,智能电动汽车的普及可减少高达43%的二氧化碳排放。然而,为了使这些汽车主流化,需要一些支持基础设施来长期增强它们。作为一种新兴的架构,数字孪生的相关方法基于虚拟地图原理,可以作为扩展的基础,可以进一步帮助研究虚拟环境中多系统主体的生命周期。在系统开发中,还基于双场景对各种案例进行泛化仿真,如增加天气变化、人类驾驶行为、场景案例的泛化等。作为场景案例泛化的示例,假设模拟了大型卡车碾压人的事故场景,但模型完成后,它是一个固定的场景。也就是说,车辆在固定的时间到达固定位置,缺乏有关实际事故现场的原因和后果的信息。这时需要做一些智能处理,比如提高车速,或者增加交通参与度等,让场景案例与真实场景相似但又不同。在这里,相似性是指真实事故场景的再现,而差异则体现在虚拟场景中更动态的过程再现上。
在交通事故分析中,以卡车交通事故为例。一旦对事故现场环境和交通参与者的轨迹进行跟踪和恢复,就可以从多个角度观察事故发生过程。鲁德斯科伊等人(2020)[71]表明所有城市在涌现阶段的交通监管问题都非常严重。最初,控制中心负责解决此问题。目前,这些中心已逐步引入一些智能交通管理方法,以帮助解决交通网络的关键问题。借助数字孪生和人工智能,实现现代交通控制的优化发展。通过定格处理,从车辆的角度可以发现,卡车司机实际上看不到骑自行车经过的人。道路数字孪生是实现未来智慧城市的重要一步,为此,ElMarai等人(2020)[72]在带有 360° 摄像头和一系列连接到唯一集线器车载计算机的物联网设备上部署了数字孪生盒。数字孪生盒通过将实时数据(包括 360° 实时流、GPS(全球定位系统)位置以及温度和湿度测量值)连续传输到边缘或云,将物理道路转换为数字副本资产。实时流通过头戴式设备或使用 360° 基于 Web 的播放器显示。这些数据将用作交通状况的实时监控和其他分配,例如历史交通数据查询。还可以通过在汽车中安装智能摄像头来监控交通事故的发生。至于智能汽车和驾驶员辅助技术的快速增长,在交通系统中,人类驾驶员的参与程度各不相同。在这种情况下,刘等人(2020)[73]指出驾驶员的视觉引导对于避免可能的危险至关重要。为了鼓励视觉指导机制的发展,引入了一种创新的传感器合并技术,以整合来自云的相机图像和数字孪生知识。结合在车辆上运行的目标探测器的发现和来自云端的位置信息,绘制并匹配目标车辆的边界框。因此,数字孪生在交通事故分析场景中具有很大的应用价值,可以帮助追溯和分析事故的具体原因,找到责任人。
在整体交通控制方向,采用数字孪生技术模拟城市交通状况,然后通过评价和演绎来优化交通控制策略。这是数字孪生赋能智慧交通的重要应用场景。它主要涉及三个级别的功能。
首先是监控和发现。通过数字孪生系统,可以创建信息获取和控制的闭环,并且可以控制整个过程。更重要的是,在一个非常庞大和复杂的场景中,一些关键问题可以及时发现和处理。例如,在秋冬季节,经常出现某段高速段的雾。大雾具有能见度低、突发性强、天气预报困难等特点,容易引发交通事故。利用数字孪生技术,实时检测动态感知数据,可以及时发现集群雾的发生并发出预警。例如,机场交通管制也可以使用数字孪生。赛义夫迪诺夫等人(2020)[74]在机场集中运输管理领域进行研究并进行了数字孪生实验。使用特定的仿真模型来模拟车辆空间特征的数据流。该模型可用于解释和模拟传输网络中需要集中控制系统参与的某些情况。假设在使用数字孪生的早期阶段,具有适当交通管理能力的用户可以执行控制系统的功能,并且该用户的决策保存在数字孪生的内存中,该内存可用于使用机器学习来教授控制系统。船舶交通服务系统的设计和集成以及新的VTS(Vandenberg Tracking Station)软件开发的实施是一项艰巨的工作,在接口和时间方面存在许多障碍。ÜZÜMCÜ等人的研究(2019)[75]指出指挥作战中心的个人指令和机长作为参与者的信息参与,以及自动识别系统、雷达系统、光电系统、交通服务系统之外的物理安全以及不同系统的参与,使得整体系统设计难以管理。使用MBSE(基于模型的系统工程)技术系统和工具,使用数字孪生技术设计有助于简化系统设计概述,并在执行和组合阶段开始之前检查模型左侧的接口定义[75]。
函数的第二个层次是演绎和预测。掌握数据后,可以为部分参与者创建微观行为模型,然后通过对大量交通参与者的模拟计算,可以获得宏观模拟结果,推断出情况的发展,实现预测功能。国家公路交通系统的快速发展,既有城市的智能化建设基础,更是当代信息技术不断创新的结果,GIS技术有力地推动了国家公路交通信息化的发展。GIS技术作为一种重要的地理数据处理系统,在交通数据采集、分析和处理方面具有明显的技术优势,鼓励道路交通向信息化方向发展。为了加快道路交通系统的成熟,王等人(2021)[76]指出,借助GIS技术,可以逐步构建道路交通数字孪生。数字技术作为道路交通发展的革命性技术,推动道路运输向绿色、开放、共享方向发展,为道路建设质量奠定坚实基础。由于城市的复杂性,智慧城市是一个复杂的过程。城市不是一个易于理解和预测的计算机化系统,而是一个生命系统。虽然城市数字孪生的研究仍处于起步阶段,但数字孪生的进展正在迅速发展,为促进智慧城市的发展做出了切实可行的贡献。沙哈特等人(2021)[77]确定数字孪生城市当前和未来的潜力和障碍,并提出研究议程,指导未来城市数字孪生的研究,以接近城市数字孪生全面性和完整性的巅峰。
第三级功能是评估和优化对策。通过大规模并行计算,可以同时评估多个平行世界的仿真结果。然后,通过深入学习等技术,不断完善交通控制方案,进行历史回顾和回顾研究。当事件发生时,我们可以利用数字孪生系统对交通事故的全过程进行还原,并探索响应的每一步是否做得足够好,是否有改进的空间。基础设施的数字副本可用于在其整个生命周期中执行模拟,从而实现更好的资产创建、管理和维护。这些数字孪生(定义为复杂产品的集成多物理场、多尺度和概率模拟)反映了其相应孪生体的行为和环境响应。斯泰恩等人(2021)[78]利用光学传感器技术,同时以接触式移动传感器平台为支撑,通过数字重建技术,通过数字重建技术,为创新物理基础设施的数字孪生提供可行的低成本替代方案。布鲁纳等人(2019)[79]指出城市交通中自动驾驶功能的潜在安全关键情况范围太广,无法单独通过自然驾驶或在受控的实验室环境中进行全面测试。技术和交通道路条件受到限制。这些问题和类似问题可以通过在虚拟随机对照试验设计中使用广泛且经过验证的随机模拟来解决。虚拟测试可以创建一个大型数据库,并提供检测安全评估和“压力测试”所需的高维交通场景空间所需的统计能力。英戈尔施塔特[79]打造了城市道路网络的“数字孪生”。德国是虚拟测试的关键要求。高等人(2017)[80]通过研究得出结论,小距离干道具有网络框架适应性强的优势,有利于土地开发和交通开发。当交通需求高,不符合传统道路基础设施布局标准时,应结合实际情况,深入研究,根据区域情况编制路网规划,优化路网交通效率。
综上所述,数字孪生体广泛应用于城市智慧交通。数字孪生技术支撑城市信息模型的构建,包括建筑信息、地理信息、新街景、真实三维场景等元素。其核心围绕全球数据的端到端管理和运营,包括数据收集、访问、治理、集成、轻量级、可视化和应用。城市环境的可视化模型有助于更清晰、更高效、更快速和准确的城市交通管理。
数字孪生中人工智能面临的挑战
数字孪生在汽车自动驾驶领域面临的挑战
由于全球智能互联网汽车产业的快速发展,汽车互联网相关技术的研究对推动汽车互联网的发展具有重要意义。交通场景仿真的参数化和泛化技术表明,自动驾驶仿真的测试过程和工况可以说是无边界的。无论汽车是否正常运行,都可以反复测试,以方便发现和定位问题。然而,在车辆动态仿真测试过程中,仿真传感器和传感系统进入自动驾驶控制,决定通过纯软件形成闭环测试和系统验证测试设备,这也是当前自动驾驶硬件设备面临的重要挑战。
自动驾驶的主要功能是通过接收数据采集可视化系统发送的实车实时位置、速度、加速度、航向角等信息,控制仿真系统中与实车对应的仿真车。在虚拟场景中实现实车控制和仿真车运行,使两者的运动状态同步,实现实车在循环中的基本功能。虽然现阶段的研究已经形成了高度开放的数字孪生自动驾驶测试能力,但也建立了友好开放的测试验证环境,支持各种自动驾驶算法实验,为自动驾驶相关研究公司提供开放的测试服务。但是,解决测试解决方案仍然存在挑战:
测试成本问题。目前的自动驾驶测试系统尚未完成,但已经产生了高昂的测试成本。这对汽车制造商来说是一个非常大的挑战。对于汽车制造商来说,最重要的问题是如何实现效益最大化和成本最小化。因此,建立高效低成本的测试环境、结构化的测试流程和强大的测试标准都是降低测试成本的关键问题。
测试灵活性问题。汽车的自动驾驶系统涵盖摄像头、激光雷达、毫米波雷达等各种传感器、处理器和控制器。虚拟测试环境不再是单一场景,需要满足多车驾驶测试方案的要求。因此,这就要求测试环境不仅要支持单车测试,还要支持多车同时行驶,确保不发生交通事故。事故对试验环境提出了更高的要求。
测试系统的顺利推进。未来,汽车自动驾驶技术解决方案必将面临巨大的变革和变革。首先,测试系统需要平稳地适应技术进步。在测试过程中,系统中的车辆、行人、路况、交通标志等必须保持稳定有序。当然,也需要根据测试进行测试。对象数量不断增加,汽车类型不时进行系统升级。
航空航天领域数字孪生面临的挑战
尽管数字孪生的人工智能应用在航空航天领域有广泛的研究,但仍存在一些技术挑战。以航空发动机气路系统为例。基于认知加工创新和产业化水平的进步,航空发动机数据分析正向全方位、多层次、可视化方向发展。发动机参数分析范围从发动机部件到整体发动机,从发动机状态监测到整体健康管理。数据分析也从传统的集成转变为结合了大量数据、方法和模型的数字孪生过程。目前,发动机状态监测和授权数字电控系统的检测、故障检测和定位基本可以完成,但分析发动机整体健康状况的方法有限,这也成为世界各国学者面临的重大挑战。
数字化研发战略的概念似乎是陈词滥调。在过去的10年里,随着工业软件制造商的努力,中国的各个行业,包括航空航天工业,已经“相当”熟悉数字孪生的概念,但我们熟悉数字研发应用。收获的深度、广度和价值如何,我们还有相当大的改进空间。飞机的生命周期可以达到几十年,因此记录和分析整个生命周期的数据不仅有价值,而且是必要的。基于文档的部门协作模型必须转变为基于模型的数字孪生数字协作模型。这也给相关行业带来了巨大的挑战。
关于数字孪生的使用,最好的概括是构建和维护大量超现实的模型和数据。他们最能够通过实时仿真来预测整个生命周期中的产品行为。这些模型根据不同的应用情况以多种比例和示例构建,集成了多个方面,包括最佳和物理描述,并反映了真实的产品寿命。当数字孪生部署到全范围时,它将跟踪影响产品运行的所有参数信息。它包括初始设计和进一步改进,与制造相关的偏差,修改,不确定性,更新,以及从机载结合交通健康监控系统的传感器数据中可以获得的所有历史数据和航空数据,管理以前的记录,实现数据挖掘。
因此,只有利用完整的数字孪生技术,建立大量的超现实模型和数据,包括数字产品模型、数字制造模型、数字性能模型,实时、双向、透明、系统地考虑设计、制造和性能。可以控制和缩短开发周期,否则随着研发难度的增加,延迟交付的风险会越来越大。此外,只有全数字化才能突破性能设计的瓶颈。
数字孪生在智能制造领域面临的挑战
随着许多智能生产施工技术越来越成熟,智能制造技术越来越普及,实现车间设备生产过程的高效智能实时监控仍然是研究的重点。目前,工业生产已经发展到高度自动化、信息化的阶段,但仍存在许多问题需要改进和优化。例如,许多工厂对信息系统的建设程度不同,系统之间的渠道没有完全打通,存在大量的信息孤岛,存在数据管理不完善、数据标准不一致等问题。具体来说,工厂生产的产品多样化,高度个性化,通用性差。这直接导致频繁的产品设计和工艺变更,给生产、采购、仓库、质量带来巨大挑战。
此外,工厂在多品种产品小批量生产方面也存在亟待解决的问题:例如,一些多品种、小批量的离散生产模式限制了车间生产线规模化生产和智能化改造的步伐。工厂设备陈旧,难以重建,许多环节仍以人工操作为主。但是,如果工厂过于依赖人工操作,将导致自动化和智能化的降低。数字孪生平台在工业产品设计和工业产品生产中起着非常重要的作用。在当前高度信息化、一体化的工业生产模式中,当生产线发生意外故障时,很容易导致整条生产线停产停产。例如,一条高度精细化的汽车生产线每天可能造成数百万的损失。对于一些特殊工艺生产线,如高温高压下的化工生产线,甚至面临严重的安全隐患和衍生灾害。因此,工业生产过程必须依靠大规模数据的帮助,如设备诊断、化工生产过程模拟、虚拟数字空间中对当前设备状态和生产过程结果的模拟预测,以防止现场故障和生产异常造成严重后果。
在工业产品设计过程中,如果没有数字化的帮助,设计一个产品就要经过多次迭代,消耗资源,影响交货时间。在高度集成的工业生产线设计中,需要基于精确节拍对各种设备、材料、质检、人工装配等环节进行优化协调,以提高整体效率。传统的规划流程只能依靠实际生产线中的手动模拟或验证。
数字孪生在智慧城市交通领域面临的挑战
数字孪生城市是在城市积累数据由量变向质变的背景下,在感知建模、人工智能等信息技术取得重大突破的背景下,建设新型智慧城市的全新技术路径。是城市智能化、可持续运营的新兴技术路径和先进模式。然而,面对当前城市管理的诸多挑战,如何突破传统智慧城市的桎梏,逐步向“数字孪生城市”转型升级,是一个值得思考的问题。数字孪生城市的核心是模型和数据,建立完整的数字模型是一个关键的起点。从目前传统智慧城市建设的应用来看,各个领域还存在数据碎片化。一般城市至少有3张底图,即住房和城乡建设体系推动的城市信息模型平台、以自然资源和土地规划为主导的时空大数据平台、基于公安政法的城市安全与综合治理城市底图。每个底图形成自己的系统,一般只支持系统中的应用程序。其他部门不能按需随时使用它。这个数字已经积累了相当长的一段时间,很难放弃和整合。这使得实施城市交通模拟过程变得困难和具有挑战性。
事实上,在数字孪生工具和平台的构建方面,目前的工具和平台大多侧重于某些特定方面,缺乏系统性的考虑。但打造城市规划、建设、管理全过程可视化,采集城市“脉搏”数据,反映城市及时运行情况,为信息资源共享、整合、有效利用、跨部门业务协同提供根解决方案。数字孪生技术具有巨大的潜力。
数字孪生中人工智能的未来前景
数字孪生在汽车自动驾驶领域的未来展望
在未来推广数字孪生汽车自动驾驶虚拟环境测试系统时,使用开放式模拟接口控制基于代码的交通场景是未来的一大趋势。未来的研究课题将围绕测试平台的推广进行。毕竟目前自动驾驶测试环境的利用率并没有那么高。未来需要大量全面的市场调研,准确把握市场需求,制定合理的市场推广计划,包括科研成果转化方法、产品推广应用方法、产品定价等,制定合理的产品开发计划,建立软硬件一体化数字孪生自动驾驶测试平台。
通过联合汽车制造企业、汽车供应商、科研机构等建立数字孪生自动驾驶测试系统,共同攻克其技术难关,逐步形成自动驾驶测试系统共识,推动自动驾驶测试行业发展。另一方面,面向车企、汽车供应商、科研机构推出了数字孪生自动驾驶测试平台。采用联合单位会员制,低成本使用,共同开发;对于非联合单位,采用检测服务按次收费、平台设立年费或永久授权费两种方式。建立完整的售前咨询-平台建立-检测服务-售后维护团队和体系,进行检测平台适应性调整和售后问题的收集和解决。
当然,跟踪和记录过程也非常重要。持续跟踪记录数字孪生自动驾驶测试平台的外部使用情况,建立使用信息数据库,并根据使用情况数据进行各方面对比。对数字孪生自动驾驶测试系统进行模块化、平台化效果评估,实现数字孪生自动驾驶测试系统的针对性提升,实现“平台建立-跟踪回访-迭代升级”的闭环开发模式。
航空航天领域数字孪生的未来研究课题
在航空航天领域,数字孪生的使用已经显示出令人印象深刻的好处。借助物理实体模型的构建和相关数据的应用,不仅可以减少飞机认证测试的次数和持续时间,消除意外的裂缝和故障,还可以减少对飞机整体结构和频率的维护检查次数,实现前所未有的经济安全可靠。然而,数字孪生技术目前缺乏系统化、通用的参考模型作为指导,未来在数字孪生模型优化的相关研究方面还有很长的路要走。此外,数字孪生将逐步向仿真和集成方向发展。这两个也是未来研究的主题。虚拟化——对象数字孪生的完整性对于其在工业领域的应用成功至关重要。每个物理模型都有一个特定的模型,常用的模型如流体力学、结构力学、热力学、应用力学、疲劳损伤、材料状态演化模型等,未来将不同的模型关联在一起并实时反映在孪生模型中是数字孪生技术实施的关键。集成——模型与关键数据在产品各个阶段和孪生生命周期的双向交互的实现,决定了数字孪生技术能否成功应用。这一突破的实现需要其他技术支持,数字孪生的愿景需要与其他先进技术相结合才能实现。
数字孪生在智能制造方向的未来展望
未来几年,数字孪生的发展趋势将不断增强。越来越多的制造商开始利用数字孪生技术来改进程序,生成实时数据库判断,并开始寻找机会修改创新服务、产品和业务方法。制造业将慢慢成为数字孪生技术应用的先驱。如果早期从业者在各个行业表现出先发优势,其他制造公司将跟随他们的步伐。从长远来看,要充分发挥数字孪生技术的潜力,可能需要整合生态系统所有部分的系统和数据。建立对客户生命周期或供应链的完整数字化模仿,并提供有见地的宏观操作视角,包括一线供应商和自有供应商,但仍需将外在物质融入内在数字生态圈。现在,大多数制造商仍然对超越点对点连接的外部连接不满意。克服这种犹豫可能是一场长期的战斗,但最终所有的努力都是值得的。未来,企业希望利用区块链打破信息孤岛,验证信息,进入数字孪生。这将释放大量以前无法访问的数据,使模拟更加详细和动态,并创造不可估量的潜在价值。
城市智能交通中数字孪生的未来研究课题
随着信息技术的不断迭代、5G标准的逐步完善和商用网络的建立,大带宽、高速度、低时延的网络性能将进一步赋能数字孪生智能交通系统的升级。一方面,5G超高速网络性能使车辆在高速运动中安全可靠地通信成为可能,确保实现车路协同自动驾驶、车辆编队自动驾驶、远程自动驾驶等功能。另一方面,5G的加速发展,协同了物联网和人工智能,使交通系统具备“连接万物”的能力,让数字孪生从物理世界“迁移”“人-车-路-环境”交通四要素。在数字世界中,交通数据得到了极大的丰富,让智慧交通的“数字化、网络化、智能化”得以真正落地。虽然数字孪生是智慧交通的前沿趋势,但与真正的全球管理、同步可视化、虚实交互的数字孪生交通系统之间仍存在一定差距。然而,在5G技术变革和需求升级的推动下,数字孪生产生了智慧交通的新思路、新方法、新理念,未来将持续发展,最终形成完整的技术运营体系。
随着5G、6G等前沿通信技术的进步,再加上端侧云协同计算,可以提高数字孪生的实时性能,甚至可以在不依赖高精度地图的情况下实时对未知区域进行建模。其次,通过改进行为模拟和预测算法,可以使行为预测的推演更加准确,并且计算能力更强,可以一次推导出更多的平行世界。此外,随着V2X(车联网)技术的发展,将有更多类型的交通参与者和更复杂的场景。如何让仿真变得更好,也是一个值得研究的方向。最后,在实时决策和个人远程控制方面,对整个孪生系统的要求会更高。例如,数据是否可以即时安全地传输到云端和后端,以及通过态势感知,控制命令是否可以传回物理世界。这个过程必须足够快地完成,数据传输过程需要安全稳定。结合区块链等相关技术是使这些信息闭环过程安全稳定的可探索解决方案。
数字孪生城市也是城市信息化建设不断发展的产物,是城市信息化发展的高水平阶段。实体城市对应的数字孪生城市充分利用前期形成的全市大数据,为城市综合决策、智能化管理、全局优化提供平台、工具和手段。
讨论数字孪生在相关领域的应用
根据研究人员的研究可以发现,数字孪生在不同领域的应用已经成熟,未来有良好的应用前景。这在目前的一些研究中也得到了证实。万等人(2021)[81]综述了半监督支持向量机(SVM)在脑图像融合数字孪生体中的特征检测、诊断和预测性能。针对脑图像中大量未标记数据,利用未标记和标记数据,提出一种半监督SVM。同时,该研究还描述了如何增强AlexNet模型,并利用数字孪生模型将实际空间中的大脑图像映射到虚拟空间。不难发现,尽管脑肿瘤图像具有复杂的边缘结构、伪影、偏移场和影响图像分割的其他缺陷,但数字孪生在医学领域的应用实现了脑肿瘤精准治疗的关键步骤,真正满足了临床需求。在脑肿瘤的后续临床诊疗中极为重要。
吕等人(2021)[82]讨论了UAV(无人机)在5G/B5G(超越5G)移动和无线通信中的应用和限制。根据5G通信,提出深度学习算法,在深度学习的基础上开发无人机数字孪生消息传递路径模型。协调多点传输技术利用无人机进行干扰抑制研究。采用物理层安全的基本算法来保证信息传输的安全性。最后,可以对构建的模型进行仿真和分析。该算法在收敛速度和收敛效果方面具有突出优势,具有较强的鲁棒性。研究进一步验证了互联网技术在航空航天工业发展中发挥着不可替代的作用。
陶等人(2021)[83]表明数字孪生——机器或系统的精确虚拟副本——正在彻底改变行业。在从传感器收集的实时数据的驱动下,这些复杂的计算机模型几乎反映了项目、程序或服务的各个方面。许多大公司都使用数字孪生来发现问题并提高效率。一位分析师预测,到2021年,一半的公司可能会使用它们。83.尽管如此,要实现数字孪生的潜力,仍有许多工作要做。仍然面临收集数据类型的困难,例如丢失或错误的数据会扭曲结果并隐藏故障。例如,如果振动传感器发生故障,风力涡轮机的振荡将被忽略。算法和模型的建立也面临着巨大的挑战。例如,当为不同目的编写的软件手动修补在一起时,可能会发生其他错误。没有标准和指南,很难验证生成的模型的准确性。许多数字孪生可能需要组合。例如,虚拟飞机可以将机身的3D模型与故障诊断系统以及空调和增压监控系统之一相结合。
结论
随着大数据、物联网、工业互联网和智能控制技术的快速发展,数字孪生作为一种新型技术广泛应用于生活的方方面面。数字孪生已成为制造业现实世界与数字虚拟世界的理想连接,也是实现现实世界和信息世界互动与合作的有效技术途径。数字孪生是以数字方式创建真实实体的虚拟实体,利用历史数据、实时数据和算法模型对真实实体的整个生命周期进行仿真、验证、预测和控制。数字孪生作为关键技术和提高效率的重要工具,可以在模型设计、数据采集、分析、预测和仿真中有效发挥作用,助力推动数字产业化和产业数字化,以及数字化与实体经济发展的融合。
数字孪生依靠知识机制、数字化等技术构建数字模型,利用物联网等技术将物理世界中的数据和信息转换为通用数据,将AR/VR/MR/GIS(增强现实/虚拟现实/混合现实/地理信息系统)等技术完全结合,再现数字世界中的物理实体。在此基础上,将数字孪生描述、诊断预调整/预测、利用AI、大数据、云计算等技术的智能决策等常见应用赋能到各个垂直行业。由此可见,人工智能是数字孪生生态系统的底层核心技术之一。其必要性主要体现在数字孪生生态系统中的海量数据处理和系统自我优化,使数字孪生生态系统有序智能云出行,是数字孪生生态系统的中心大脑。两者的结合对于目前的研究现状至关重要,未来的研究将给各个行业带来不同程度的智能化改造。
参考书目
-
1. Rasheed A, San O, Kvamsdal T: Digital twin: Values, challenges and enablers from a modeling perspective. Ieee Access. 2020; 8: 21980–22012. Publisher Full Text
-
2. Fuller A, Fan Z, Day C, et al.: Digital twin: Enabling technologies, challenges and open research. IEEE access. 2020; 8: 108952–108971. Publisher Full Text
-
3. Khajavi SH, Motlagh NH, Jaribion A, et al.: Digital twin: vision, benefits, boundaries, and creation for buildings. IEEE access. 2019; 7: 147406–147419. Publisher Full Text
-
4. Madni AM, Madni CC, Lucero SD: Leveraging digital twin technology in model-based systems engineering. Systems. 2019; 7(1): 7. Publisher Full Text
-
5. Vaishya R, Javaid M, Khan IH, et al.: Artificial Intelligence (AI) applications for COVID-19 pandemic. Diabetes Metab Syndr. 2020; 14(4): 337–339. PubMed Abstract | Publisher Full Text | Free Full Text
-
6. Gunning D, Aha D: DARPA’s explainable artificial intelligence (XAI) program. AI Magazine. 2019; 40(2): 44–58. Publisher Full Text
-
7. Haenlein M, Kaplan A: A brief history of artificial intelligence: On the past, present, and future of artificial intelligence. Calif Manage Rev 2019; 61(4): 5–14. Publisher Full Text
-
8. Tao F, Zhang H, Liu A, et al.: Digital twin in industry: State-of-the-art. Ieee T Ind Inform. 2018; 15(4): 2405–2415. Publisher Full Text
-
9. Collins GS, Moons KG: Reporting of artificial intelligence prediction models. Lancet. 2019; 393(10181): 1577–1579. PubMed Abstract | Publisher Full Text
-
10. Bullock JA, Luccioni A, Luengo-Oroz M, et al.: Mapping the landscape of artificial intelligence applications against COVID-19. J Artif Intell Res. 2020; 69: 807–845. Publisher Full Text
-
11. Calo R: Artificial Intelligence policy: a primer and roadmap. UCDL Rev. 2017; 51: 399. Publisher Full Text
-
12. Alexopoulos K, Nikolakis N, Chryssolouris G: Digital twin-driven supervised machine learning for the development of artificial intelligence applications in manufacturing. Int J Comp Integ M. 2020; 33(5): 429–439. Publisher Full Text
-
13. Fan C, Zhang C, Yahja A, et al.: Disaster City Digital Twin: A vision for integrating artificial and human intelligence for disaster management. Int J Inform Manage. 2021; 56: 102049. Publisher Full Text
-
14. Rasheed A, San O, Kvamsdal T: Digital twin: Values, challenges and enablers. arXiv preprint arXiv. 2019; 1910,01719. Reference Source
-
15. Kousi N, Gkournelos C, Aivaliotis S, et al.: Digital twin for adaptation of robots’ behavior in flexible robotic assembly lines. Procedia manufacturing. 2019; 28: 121–126. Publisher Full Text
-
16. Liu Z, Meyendorf N, Mrad N: The role of data fusion in predictive maintenance using digital twin. In AIP Conference Proceedings. 2018; 1949(1): 020023. Publisher Full Text
-
17. Song EY, Burns M, Pandey A, et al.: IEEE 1451 smart sensor digital twin federation for IoT/CPS research. In 2019 IEEE Sensors Applications Symposium (SAS). 2019; 1–6. Publisher Full Text
-
18. Zhu J, Wu P: Towards Effective BIM/GIS Data Integration for Smart City by Integrating Computer Graphics Technique. Remote Sensing. 2021; 13(10): 1889. Publisher Full Text
-
19. Ajjour Y, Wachsmuth H, Kiesel J, et al.: Data acquisition for argument search: The args. me corpus. In Joint German/Austrian Conference on Artificial Intelligence (Künstliche Intelligenz). 2019; 48–59. Publisher Full Text
-
20. Kandris D, Nakas C, Vomvas D, et al.: Applications of wireless sensor networks: an up-to-date survey. Appl Syst Innov. 2020; 3(1): 14. Publisher Full Text
-
21. Dahlan AG, Muhammad Naim S, Luqman Zulhilmi AA: The Research of 3D Modeling between Visual & Creativity. International Journal of Innovative Technology and Exploring Engineering (IJITEE). 2019; 8: 180–186.
-
22. Bandara M, Rabhi FA: Semantic modeling for engineering data analytics solutions. Semantic Web. 2020; 11(3): 525–547. Publisher Full Text
-
23. Wu Y, Lu Y: An intelligent machine vision system for detecting surface defects on packing boxes based on support vector machine. Meas Control. 2019; 52(7–8): 1102–1110. Publisher Full Text
-
24. Marikyan D, Papagiannidis S, Alamanos E: A systematic review of the smart home literature: A user perspective. Technol Forecast Soc. 2019; 138: 139–154. Publisher Full Text
-
25. Gram-Hanssen K, Darby SJ: “Home is where the smart is”? Evaluating smart home research and approaches against the concept of home. Energy Research & Social Science. 2018; 37: 94–101. Publisher Full Text
-
26. Dorri A, Kanhere SS, Jurdak R, et al.: Blockchain for IoT security and privacy: The case study of a smart home. 2017 IEEE international conference on pervasive computing and communications workshops (PerCom workshops). 2017; 618–623. Publisher Full Text
-
27. Phanden RK, Sharma P, Dubey A: A review on simulation in digital twin for aerospace, manufacturing and robotics. Mater Today: Proc. 2021; 38: 174–178. Publisher Full Text
-
28. Ibrion M, Paltrinieri N, Nejad AR: On risk of digital twin implementation in marine industry: Learning from aviation industry. J Phys: Conf Ser. 2019; 1357(1): 012009. Publisher Full Text
-
29. Aydemir H, Zengin U, Durak U: The digital twin paradigm for aircraft review and outlook. AIAA Scitech 2020 Forum. 2020; 0553. Publisher Full Text
-
30. Yurkevich EV, Stepanovskaya IA: Controlling the security of the airport airspace using the digital twin. J Phys: Conf Ser. IOP Publishing, 2021; 1864(1): 012128. Publisher Full Text
-
31. An J, Mikhaylov A, Kim K: Machine learning approach in heterogeneous group of algorithms for transport safety-critical system. Appl Sci. 2020; 10(8): 2670. Publisher Full Text
-
32. Tu Z, Fei F, Deng X: Untethered flight of an at-scale dual-motor hummingbird robot with bio-inspired decoupled wings. IEEE Robot Autom Lett. 2020; 5(3): 4194–4201. Publisher Full Text
-
33. Dai X, Ke C, Quan Q, et al.: RFlySim: Automatic test platform for UAV autopilot systems with FPGA-based hardware-in-the-loop simulations. Aerosp Sci Technol. 2021; 114: 106727. Publisher Full Text
-
34. Singh KK, Frazier AE: A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int J Remote Sens. 2018; 39(15–16): 5078–5098. Publisher Full Text
-
35. Zolanvari M, Jain R, Salman T: Potential data link candidates for civilian unmanned aircraft systems: A survey. IEEE Commun Surv Tut. 2020; 22(1): 292–319. Publisher Full Text
-
36. Barr LC, Newman R, Ancel E, et al.: Preliminary risk assessment for small unmanned aircraft systems. 17th AIAA Aviation Technology, Integration, and Operations Conference. 2017; 3272. Publisher Full Text
-
37. Grigoropoulos N, Lalis S: Simulation and digital twin support for managed drone applications. 2020 IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications (DS-RT). 2020; 1–8. Publisher Full Text
-
38. Reitenbach S, Vieweg M, Becker R, et al.: Collaborative Aircraft Engine Preliminary Design using a Virtual Engine Platform, Part A: Architecture and Methodology. AIAA Scitech 2020 Forum. 2020; 0867. Publisher Full Text
-
39. Xiong M, Wang H, Fu Q, et al.: Digital twin–driven aero-engine intelligent predictive maintenance. Int J Adv Manuf Tech. 2021; 114: 3751–3761. Publisher Full Text
-
40. Van Waarde HJ, Eising J, Trentelman HL, et al.: Data informativity: a new perspective on data-driven analysis and control. IEEE T Automat Contr. 2020; 65(11): 4753–4768. Publisher Full Text
-
41. Le XH, Ho HV, Lee G, et al.: Application of long short-term memory (LSTM) neural network for flood forecasting. Water. 2019; 11(7): 1387. Publisher Full Text
-
42. Pogarskaia T, Churilova M, Petukhova M, et al.: Simulation and optimization of aircraft assembly process using supercomputer technologies. Russian Supercomputing Days. 2018; 965: 367–378. Publisher Full Text
-
43. Zaitseva N, Lupuleac S, Petukhova M, et al.: High performance computing for aircraft assembly optimization. In: 2018 Global Smart Industry Conference (GloSIC). 2018; 1–6. Publisher Full Text
-
44. Qiuyue Z, Luling AN: Application of virtual reality and augment reality in aircraft assembly. Aeronautical Manufacturing Technology. 2017; 530(11): 40–45.
-
45. Liang B, Liu W, Liu K, et al.: A displacement field perception method for component digital twin in aircraft assembly. Sensors (Basel). 2020; 20(18): 5161. PubMed Abstract | Publisher Full Text | Free Full Text
-
46. Wagner R, Haefner B, Lanza G: Function-oriented quality control strategies for high precision products. Proc CIRP. 2018; 75: 57–62. Publisher Full Text
-
47. Sun X, Bao J, Li J, et al.: A digital twin-driven approach for the assembly-commissioning of high precision products. Robot Cim-Int Manuf. 2020; 61: 101839. Publisher Full Text
-
48. Cai H, Zhu J, Zhang W: Quality Deviation Control for Aircraft Using Digital Twin. J Comput Inf Sci Eng. 2021; 21(3): 031008. Publisher Full Text
-
49. Guo F, Liu J, Zou F, et al.: Aircraft Assembly Quality Control With Feedback Actions and Assembly Station Flowing Fluctuation Analysis. IEEE Access. 2020; 8: 190118–190135. Publisher Full Text
-
50. Lv C, Cao D, Zhao Y, et al.: Analysis of autopilot disengagements occurring during autonomous vehicle testing. IEEE/CAA Journal of Automatica Sinica. 2017; 5(1): 58–68. Publisher Full Text
-
51. Dikmen M, Burns C: Trust in autonomous vehicles: The case of Tesla Autopilot and Summon. In: IEEE Int Conf Syst Man Cybern. 2017; 1093–1098. Publisher Full Text
-
52. James A, Krestinskaya O, Maan A: Recursive Threshold Logic-A Bioinspired Reconfigurable Dynamic Logic System With Crossbar Arrays. IEEE Trans Biomed Circuits Syst. 2020; 14(6): 1311–1322. PubMed Abstract | Publisher Full Text
-
53. Dennis AR, Minas RK: Security on autopilot: Why current security theories hijack our thinking and lead us astray. ACM SIGMIS Database: The DATABASE for Advances in Information Systems. 2018; 49(SI): 15–38. Publisher Full Text
-
54. Larini G, Romano G, Falcitelli M, et al.: Autonomous Driving Progressed by oneM2M : The Experience of the AUTOPILOT Project. In: 2019 European Conference on Networks and Communications (EuCNC). 2019; 204–208. Publisher Full Text
-
55. Almeaibed S, Al-Rubaye S, Tsourdos A, et al.: Digital Twin Analysis to Promote Safety and Security in Autonomous Vehicles. IEEE Communications Standards Magazine. 2021; 5(1): 40–46. Publisher Full Text
-
56. Yun H, Park D: Simulation of Self-driving System by implementing Digital Twin with GTA5. In: 2021 International Conference on Electronics, Information, and Communication (ICEIC). 2021; 1–2. Publisher Full Text
-
57. Khan M, Chakraborty S, Astya R, et al.: Face Detection and Recognition Using OpenCV. In: 2019 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS). 2019; 116–119. Publisher Full Text
-
58. Valeja Y, Pathare S, Patel D, et al.: Traffic Sign Detection using Clara and Yolo in Python. In: 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS). 2021; 1: 367–371. Publisher Full Text
-
59. Kumar N, Rathee M, Chandran N, et al.: Cryptflow: Secure tensorflow inference. In: IEEE Symp Secur Priv. 2020; 336–353. Publisher Full Text
-
60. Zhou G, Zhang C, Li Z, et al.: Knowledge-driven digital twin manufacturing cell towards intelligent manufacturing. Int J Prod Res. 2020; 58(4): 1034–1051. Publisher Full Text
-
61. Li L, Qu T, Liu Y, et al.: Sustainability Assessment of Intelligent Manufacturing Supported by Digital Twin. IEEE Access. 2020; 8: 174988–175008. Publisher Full Text
-
62. Zhang C, Ji W: Digital twin-driven carbon emission prediction and low-carbon control of intelligent manufacturing job-shop. Procedia CIRP. 2019; 83: 624–629. Publisher Full Text
-
63. Zhao H, Liu J, Xiong H, et al.: 3D visualization real-time monitoring method for digital twin workshop. Computer Integrated Manufacturing Systems. 2019; 25(06): 1432–1443.
-
64. Wu P, Qi M, Gao L, et al.: Research on the Virtual Reality Synchronization of Workshop Digital Twin. In: 2019 IEEE 8th Joint International Conference on information technology and artificial intelligence (itaic). 2019; 875–879. Publisher Full Text
-
65. Fang Y, Peng C, Lou P, et al.: Digital-Twin-Based Job Shop Scheduling Toward Smart Manufacturing. IEEE Trans Industr Inform. 2019; 15(12): 6425–6435. Publisher Full Text
-
66. Gao X, Cai J: Optimization analysis of urban function regional planning based on big data and GIS technology. Technical Bulletin. 2017; 55(11): 344–351. Reference Source
-
67. Zhu L, Yu FR, Wang Y, et al.: Big data analytics in intelligent transportation systems: A survey. IEEE trans Intell Transp Syst. 2018; 20(1): 383–398. Publisher Full Text
-
68. Veres M, Moussa M: Deep learning for intelligent transportation systems: A survey of emerging trends. IEEE trans Intell Transp Syst. 2019; 21(8): 3152–3168. Publisher Full Text
-
69. Mavromatis I, Piechocki RJ, Sooriyabandara M, et al.: Drive: digital network Oracle for collaborative intelligent transportation systems. Proc IEEE Symp Comput Commun. 2020; 1–7. Publisher Full Text
-
70. Bhatti G, Mohan H, Singh RR: Towards the future of smart electric vehicles: Digital twin technology. Renewable and sustainable energy review. 2021; 141: 110801. Publisher Full Text
-
71. Rudskoy A, Ilin I, Prokhorov A: Digital Twins in the Intelligent Transport Systems. Transportation Research Procedia. 2021; 54: 927–935. Publisher Full Text
-
72. El Marai O, Taleb T, Song J: Roads Infrastructure Digital Twin: A Step Toward Smarter Cities Realization. IEEE Network. 2021; 35(2): 136–143. Publisher Full Text
-
73. Liu Y, Wang Z, Han K, et al.: Sensor fusion of camera and cloud digital twin information for intelligent vehicles. In: 2020 IEEE Intelligent Vehicles Symposium (IV). 2020; 182–187. Publisher Full Text
-
74. Saifutdinov F, Jackson, I, Tolujevs J, et al.: Digital Twin as a Decision Support Tool for Airport Traffic Control. In 2020 61st International Scientific Conference on Information Technology and Management Science of Riga Technical University (ITMS). 2020; (1-5). Reference Source
-
75. ÜZÜMCÜ S, MERT AA, ATAY F: Usage of Digital Twin Technologies during System Modeling and Testing in Vessel Traffic Services System Project. In INCOSE International Symposium. 2019; 29(1): 189–202. Publisher Full Text
-
76. Wang S, Zhang F, Qin T: Research on the Construction of Highway Traffic Digital Twin System Based on 3D GIS Technology. J Phys Conf Ser. 2021; 1802(4): 042–045. Publisher Full Text
-
77. Shahat E, Hyun CT, Yeom C: City digital twin potentials: A review and research agenda. Sustainability. 2021; 13(6): 3386. Publisher Full Text
-
78. Steyn WJ, Broekman A: Process for the Development of a Digital Twin of a Local Road–A Case Study. In: In Civil Infrastructures Confronting Severe Weathers and Climate Changes Conference. 2021; 11–22. Reference Source
-
79. Brunner P, Denk F, Huber W, et al.: Virtual safety performance assessment for automated driving in complex urban traffic scenarios. In 2019 IEEE Intelligent Transportation Systems Conference (ITSC). 2019; 679–685. Reference Source
-
80. Gao X, Cai J, Long Y, et al.: Study on traffic organization for primary roads with super small spacing. Advances in Transportation Studies. 2017; 2. Reference Source
-
81. Wan Z, Dong Y, Yu Z, et al.: Semi-Supervised Support Vector Machine for Digital Twins Based Brain Image Fusion. Front Neurosci. 2021; 15: 705323. PubMed Abstract | Publisher Full Text | Free Full Text
-
82. Lv Z, Chen D, Feng H, et al.: Beyond 5G for Digital Twins of UAVs. Computer Networks. 2021; 197: 108366. Publisher Full Text
-
83. Tao F, Qi Q: Make more digital twins. Nature. 2019; 573(7775): 490–491. PubMed Abstract | Publisher Full Text
扫描加入免费的「智慧城市之智慧交通」知识星球可了解更多行业资讯和资料。

