
- 1树莓派配置环境变量,解决No such file or directory的错误提示_树莓派vncunable to open i2c device: no such file or d
- 2洛谷p3817 小A的糖果
- 3C语言easyx飞机大战源码+素材(大屏版)_易语言 飞机大战
- 4基于SpringBoot的农产品销售小程序平台的设计与实现_基于springboot粮食加工订单
- 5Word Tokenization
- 6浅析自动编码器(自编码器 Autoencoder)_深度学习 coding decoding
- 7抖音商品详情数据接口python_python 获取抖音商户信息
- 8MATLAB非线性规划优化问题_带约束的非线性优化算法代码
- 9毕业设计:基于卷积神经网络的图像分类系统 python人工智能_基于卷积神经网络的图像分类系统研究研究或设计的目的和意义:
- 10Dual Contrastive Learning: Text Classification via Label-Aware Data Augmentation 阅读笔记_dual-pool contrastive learning
基于XMC4800 Ethercat从站的工厂自动化解决方案
赞
踩
背景
随着“工业4.0”与“工业互联网”概念的提出,“互联网+制造”的概念被大众所熟知,人们称之为第四次工业革命。在这样的背景下,新的工业自动化孕育而生。智能工厂、提供智能工厂设计与实施的工业4.0解决方案商、技术供应商相继出现。ARROW深度联合解决方案商、技术供应商提供实现智能工厂的渠道。伺服系统作为工业自动化最为重要的控制和执行机构之一,在机床工具、纺织机械、印刷机械和包装机械等领域得到广泛应用,同时随着近几年工业机器人、电子制造设备等产业的迅速扩张,伺服系统在新兴产业的应用规模增长迅速。新的工业自动化对高性能的电机控制系统、工业以太网(EtherCAT)有较高需求,众多客户在寻找可以将两者整合的新解决方案。
工厂自动化场景1(工业机器人)

工厂自动化场景2(搬运机器人)

英飞凌在此前推出基于32位ARM®Cortex™-M 内核的XMC4000系列MCU基础上,新推出了集成ESC(EtherCAT Slave Controller)的XMC4800芯片。XM-XMC4800工厂自动化解决方案是基于Infineon 32-bit XMC4000系列工业微处理器XMC4800的开发套件。套件提供双路EtherCAT网络接口,实现EtherCAT从站设计。扩展通用通讯接口RS485、CAN、USB-UART。电机控制专用接口可支持使用增量位置编码器的电机。提供USIC/ADC/DAC/IO集成连接器,4 inputs与2 outputs IO使用光耦隔离器件进行电气隔离。

XMC4800硬件
方案介绍
XMC4800采用单板设计,预留电机控制接口、EtherCAT接口、CAN通讯接口、USB串口、扩展按键、LED显示及扩展引脚。XMC4800提供针对运动控制的专用外设模Capture/Compare Unit 4 (CCU4)、 CCU8、POSIF、VADC,使SEED-XMC4800可执行位置环、速度环、转矩环的全闭环FOC控制。

XMC4800套件框图
全闭环FOC控制是目前常用的控制算法,控制算法如下图所示。转矩环为闭环控制系统中的最内层,包括FOC算法、电流采集及SVPWM输出。速度环位于中间层,通过PI控制器计算内层转矩环的期望值。位置环位于最外层,通过控制位置环的期望值完成对全闭环FOC的控制。

FOC全闭环结构图
XMC4800套件提供Micrium uC-Probe XMC工具实时检查各个软件参数。对调整软件系数、确定软件结构具有重要的作用。Micrium uC-Probe XMC工具的界面可以自由定义,包括样式、颜色、数据范围等等。对于一些需要连续观察变化的参数可以使用期其波形显示功能。Micrium uC-Probe XMC工具如下图所示,可以对电机的速度进行控制,并且可以观察软件状态机、FOC控制环路中参数的变化。

Micrium uC-Probe XMC
EtherCAT介绍
伺服系统通常采用FOC矢量控制法,而工业互联网则采用速度更快、接线更灵活、更易实施的EtherCAT工业以太网。传统解决方案是MCU与ESC之间使用PDI接口通讯。MCU实现电机控制,位置环、速度环、电流环等FOC电机控制算法,电机温度,母线电压,功率段等模拟量信号的检测。ESC负责网络通讯,且需要独立EEPROM用于存储EtherCAT从站信息。图5为传统EtherCAT从站组成框架。
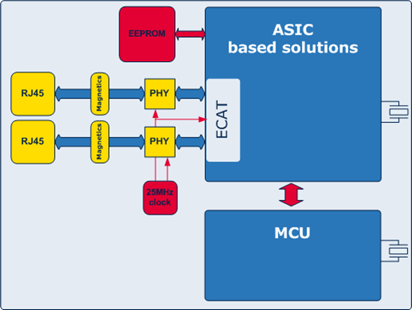
传统EtherCAT从站框架
XMC4800工作频率高达144MHz,内部集成丰富的外设,如高精度PWM、POSIF(位置)接口、ΔΣ模块。可以实现多种电机的控制。XMC4800将ESC作为MCU的外设集成在芯片内部,并完全兼容倍福ET1100的ESC,且无需外接EEPROM。这样做的优势在于产品设计简化。XMC4800可使FOC电机控制算法与EtherCAT通讯无缝衔接。图6为使用XMC4800的EtherCAT从站组成框架。

XMC4800高集成EtherCAT从站框架
XMC4800不仅完全兼容倍福的ESC ET1100,并且DPRAM的读取速度具有更大的优势,使ESC的运行效率显著提高。结合XMC4800丰富的外设,可在单独EtherCAT方案中实现两轴Encoder 或 Resolver接口的电机同时控制。XMC提供LQFP100、LQFP144、LFBGA196多种封装形式,实现双轴控制需选择LFBGA196封装。

DPRAM读取速度

EtherCAT电机控制
应用场景
-
EtherCAT从站设备
-
电机控制器系统
-
工业自动化设备
-
半导体制造机器
-
自动化装配系统
-
家具生产设备


