
- 1mysql中函数random_random()函数怎么使用 - min
- 2netlink_kernel_create
- 3STM32F103C8T6的MODBUS-RTU通讯(485通讯)_stm32 modbus
- 4122个经典SOTA模型、447个算法实现资源,我们帮你一文汇总了
- 5c语言动态规划dp(不定时间更新)
- 6加密算法(二)——MD5,Base64,DES,RSA加密算法解析_md5和base64加密与解密的算法特点
- 7基于单片机内部的ADC知识系统总结_单片机adc
- 8Dijkstra算法堆/优先队列优化_迪杰斯特拉算法堆优化
- 9HDFS的Java API操作_hdfs的java apl 操作
- 10Flink基础概念及算子_flink 算子
FPGA学习之实现PID算法_fpga pid
赞
踩
1 废话篇
1.1 理论学习
PID控制算法的学习,本次介绍位置式和增量式PID控制算法的原理和Matlab的仿真分析
1.1.1 模拟PID控制算法
在工程中,比较用的多的就是比例、积分、微分控制,简称PID控制。G(s) 为被控对象的系统传递函数。
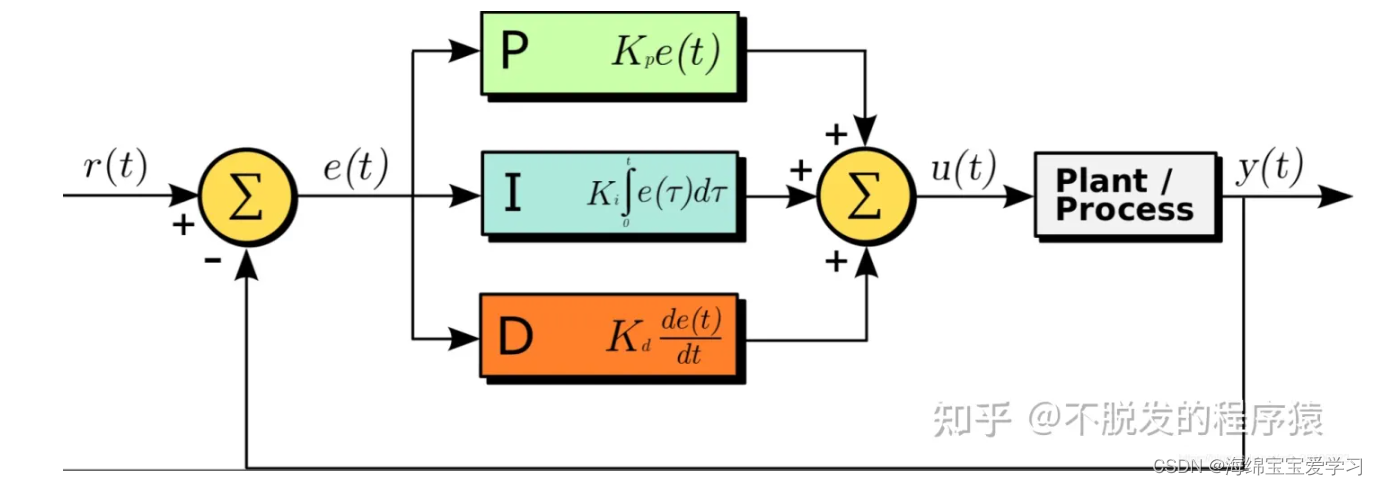
PID控制算法分为三种,分别是P调节,PI调节和PID调节算法。
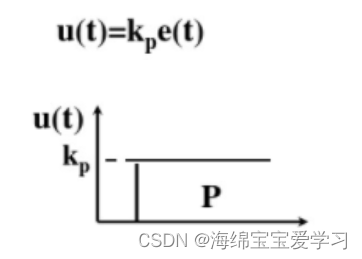
P调节算法:比例控制是一种最简单的控制方式。其控制器的输出和输入误差信号成比例光系。偏差一旦产生。控制器立即就发生作用即调节控制输出,使被控量朝着减小误差的方向变化,偏差减小的速度取决于比例系数Kp,Kp越大偏差减小的越快,但是容易引起振荡,尤其是在迟滞环节比较大的情况下,Kp减小,发生振荡的可能性减小。但是调节的速度变慢。但单纯的比例控制存在稳态误差不能消除的缺点,这里就需要积分控制。P调节算法的控制规律和阶跃响应如下图所示
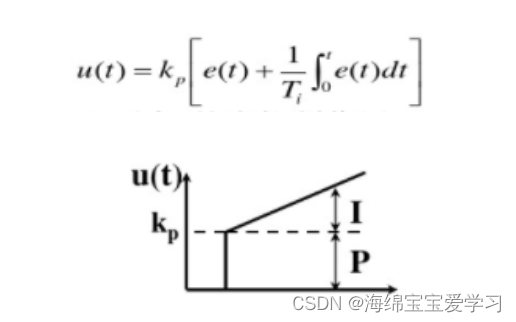
PI调节算法
在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入问太后存在稳态误差,则称这个控制系统是有稳态误差的或者简称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增大而加大,它推动控制器的输出增大使稳态误差进一步减少,直至等于零。因此,比例+积分控制器,可以使系统进入稳态后无稳态误差,实质上就是对偏差累积进行控制,直至偏差为零。积分控制作用始终施加指向给定值的作用力,有利于消除静差,其效果不仅与偏差大小有关,而且还与偏差持续的时间有关。PI调节算法的控制规律和阶跃响应如下图所示:
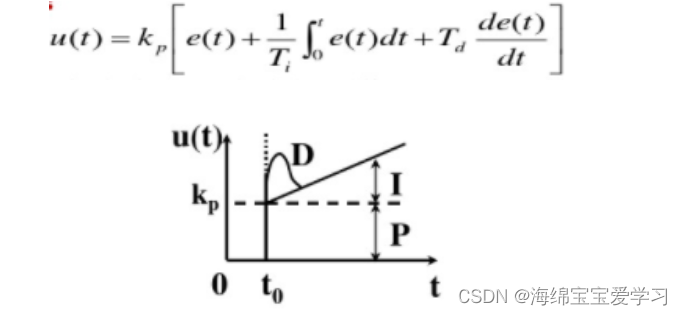
PID调节算法:
在微分控制中,控制器的输出和输入误差信号的微分(即误差变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因使由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的方法是使抑制误差的作用的变化“超前”,即在误差接近0时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是 微分项,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或者滞后的被控对象,微分比较有效果
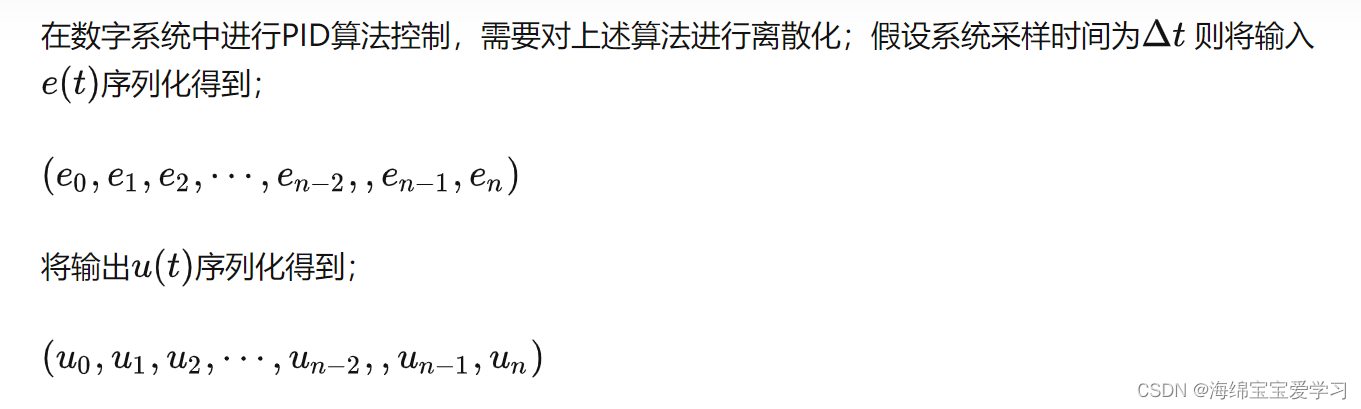
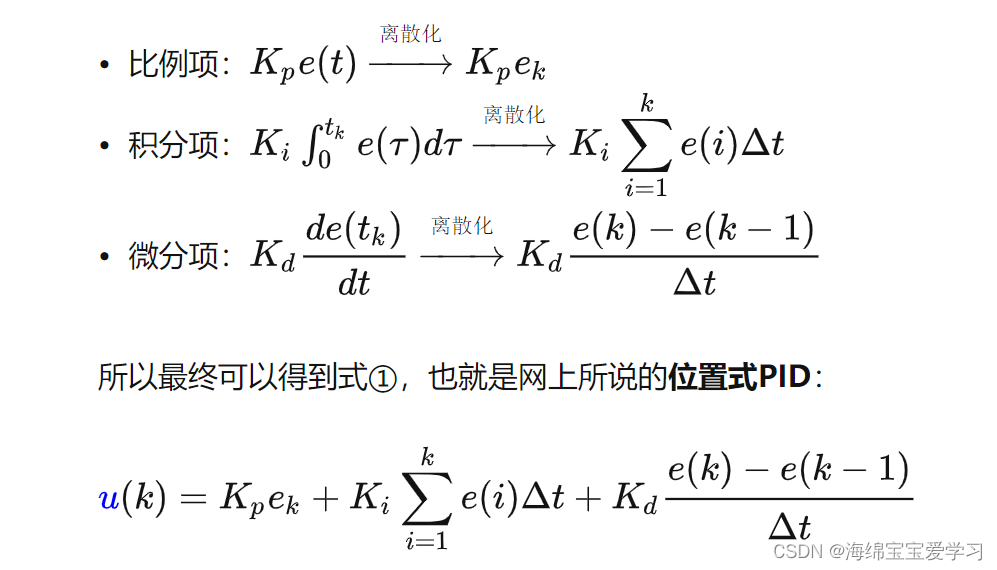
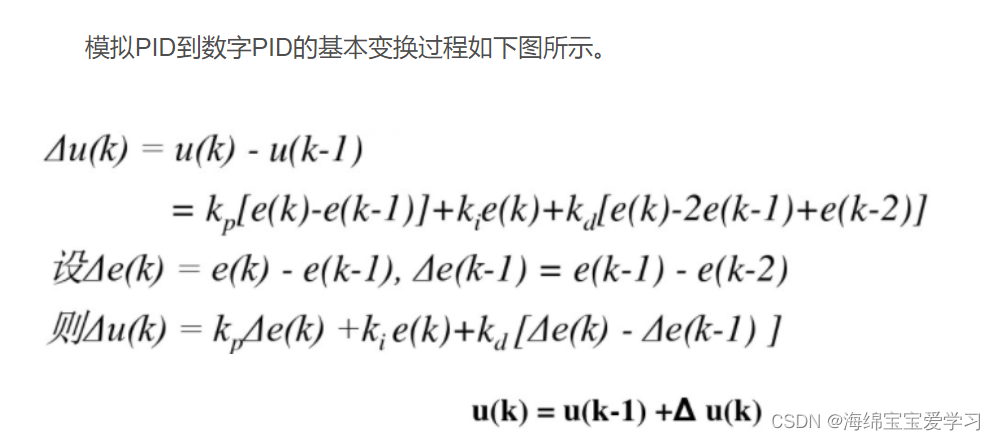
1.1.2 离散化
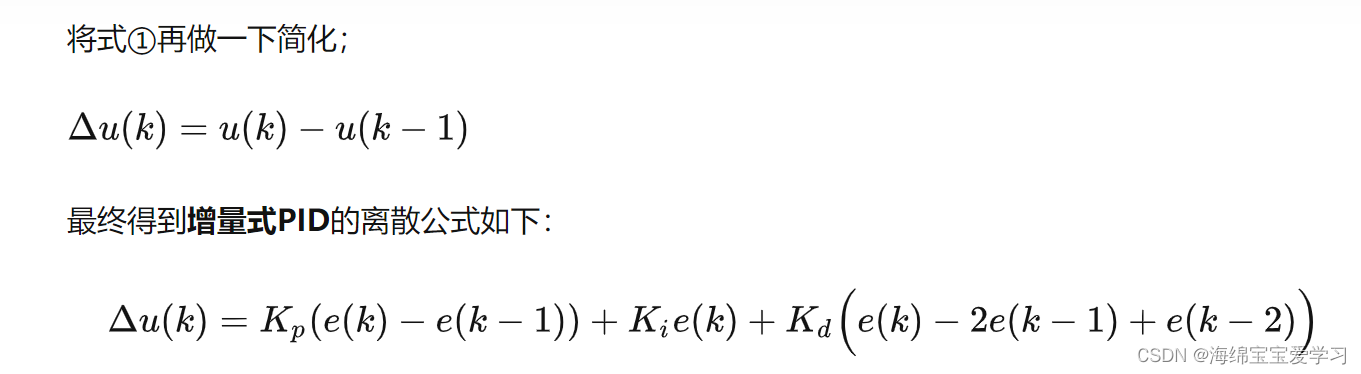
1.1.3 伪算法
这里看到网上一个位置式PID实现的伪算法:
previous_error := 0 // 上一次偏差
integral := 0; // 积分和
// 循环
// 采样周期为dt
loop:
// setpoint 设定值
// measured value 反馈值
error := setpoint - measured_value; // 计算得到偏差
integral := integral + error * dt; // 计算得到积分累加和
derivative := (error - previous_error ) / dt; // 计算得到的微分
output := kp*error + ki*integral + kd*derivate; // 计算得到PID的输出
previous_error := error; // 保存当前偏差为下一次采样时所需要的历史偏差
wait(dt);
goto loop;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
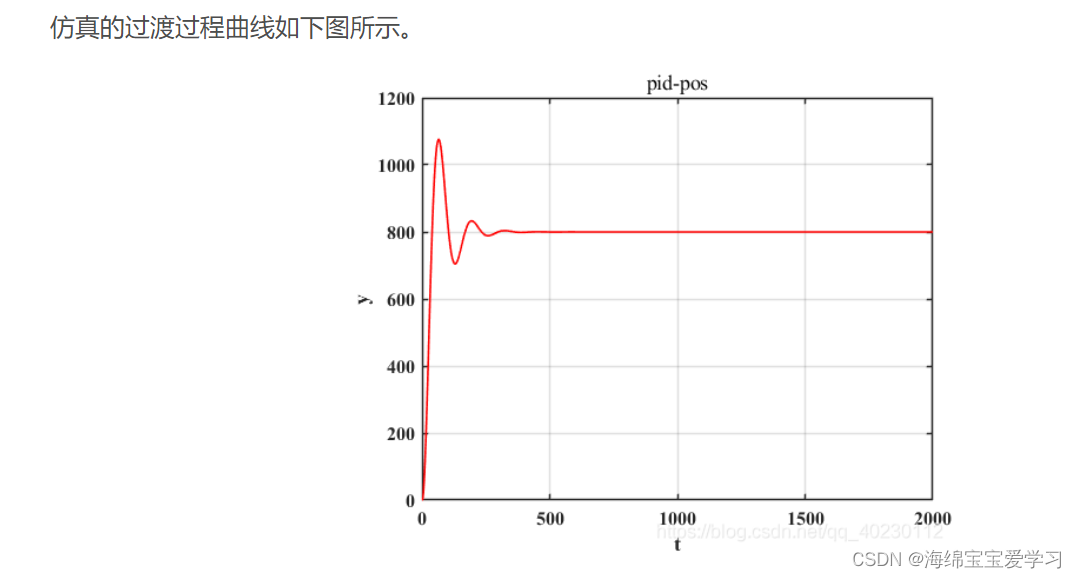
1.1.4 matlab算法位置式
对应的matlab仿真:
% 位置式PID算法仿真
clear;
clc;
%% 参数定义
Ts = 1e-3;% 采样时间
e_sum = 0;% 多次误差和
% PID参数(可根据实际情况调节)
kp = 0.32;% 比例
ki = 0.15;% 积分
kd = 0.12;% 微分
%% 建立被控系统
% 假设被控对象的系统传递函数为0.88/(0.05s + 1.5)
s_sys = tf(0.88,[0.05 1.5]); % 根据传递函数建立被控系统的模型
z_sys = c2d(s_sys,Ts,'z'); % 拉氏变换-->z变换
[m,n] = tfdata(z_sys,'v');
%% 开始PID控制
T = 2000;% 设置仿真运行时间
r = 800;% 期望输出值
% 预先分配内存
u = zeros(1,T);% PID输出初始值
y = zeros(1,T);% 被控系统响应输出
e = zeros(1,T);% 误差信号
for k=2:1:T
y(k) = -n(2)*y(k-1) + m(1)*u(k) + m(2)*u(k-1);% 计算被控系统输出
e(k) = r - y(k); % 计算误差
u(k) = kp*e(k) + ki*e_sum + kd*(e(k)-e(k-1)); %根据误差调整PID控制量输出
e_sum = e_sum+e(k);% 计算多次误差和
end
% 绘制过渡过程的曲线
t = 1:1:T;
figure('Color','White');
plot(t,y,'r-','LineWidth',1.2);
title('pid-pos')
xlabel('t');
ylabel('y');
grid on;
set(gca,'FontSize',12,'LineWidth',1.2,'Fontname', 'Times New Roman','FontWeight','Bold')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
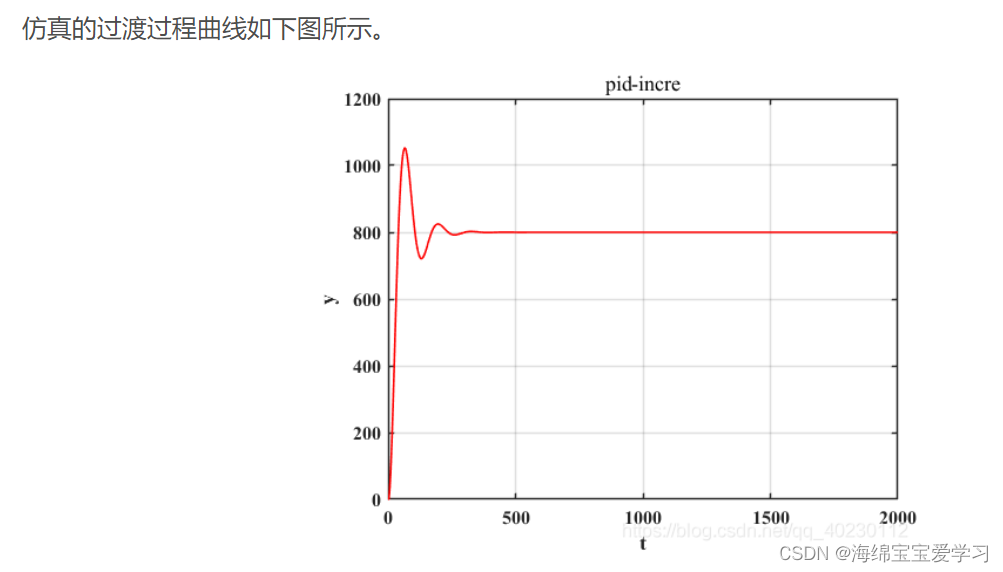
1.1.5 matlab 算法增量式
% 位置式PID算法仿真
clear;
clc;
%% 参数定义
Ts = 1e-3;% 采样时间
% PID参数(可根据实际情况调节)
kp = 0.32;% 比例
ki = 0.15;% 积分
kd = 0.12;% 微分
%% 建立被控系统
% 假设被控对象的系统传递函数为0.88/(0.05s + 1.5)
s_sys = tf(0.88,[0.05 1.5]); % 根据传递函数建立被控系统的模型
z_sys = c2d(s_sys,Ts,'z'); % 拉氏变换-->z变换
[m,n] = tfdata(z_sys,'v');
%% 开始PID控制
T = 2000;% 设置仿真运行时间
r = 800;% 期望输出值
% 预先分配内存
u = zeros(1,T);% PID输出初始值
y = zeros(1,T);% 被控系统响应输出
e = zeros(1,T);% 误差信号
d_u = zeros(1,T);% PID输出增量
for k=3:1:T
y(k) = -n(2)*y(k-1) + m(1)*u(k) + m(2)*u(k-1);% 计算被控系统输出
e(k) = r - y(k); % 计算误差
d_u(k) = kp*(e(k)-e(k-1))+ki*e(k)+kd*((e(k)-e(k-1))-(e(k-1)-e(k-2)));% 根据误差获取PID增量
u(k) = u(k-1) + d_u(k);% 根据PID增量计算PID控制输出
end
% 绘制过渡过程的曲线
t = 1:1:T;
figure('Color','White');
plot(t,y,'r-','LineWidth',1.2);
title('pid-incre')
xlabel('t');
ylabel('y');
grid on;
set(gca,'FontSize',12,'LineWidth',1.2,'Fontname', 'Times New Roman','FontWeight','Bold')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
1.1.5 verilog 实现PID
error.v
module error(
input clk,
input rst_n,
input signed [9:0] target,
input signed [9:0] y,
output signed [9:0] ek0,
output reg signed[9:0] ek1;
output reg signed [9:0] ek2;
);
assign ek0 = target - y; // 计算e(k)
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
ek1 <= 10'd0;
ek2 <= 10'd0;
end
else begin
ek1 <= ek0; // 延时一个时钟周期 得到e(k-1)
ek2 <= ek1; // 再延时一个时钟周期 得到e(k-2)
end
end
endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
pid_value.v
///
// Company: <Name>
//
// File: pid_value.v
// File history:
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
//
// Description:
//
// <Description here>
//
// Targeted device: <Family::SmartFusion> <Die::A2F060M3E> <Package::288 CS>
// Author: <Name>
//
///
//`timescale <time_units> / <precision>
module pid_value(
input clk, // 时钟信号
input rst_n, // 复位信号,低电平有效
input signed [14:0] d_uk, // pid 增量
output reg signed [14:0] uk0 // pid 输出值
);
reg signed [14:0] uk1 = 15'd0; // 上一时刻u(k-1) 的值
always @(d_uk) begin
uk0 = uk1 + d_uk; // 计算pid 输出值
uk1 = uk0; // 寄存上一时刻 u(k-1) 的值
end
//<statements>
endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
incre_value.v
///
// Company: <Name>
//
// File: incre_value.v
// File history:
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
//
// Description:
//
// <Description here>
//
// Targeted device: <Family::SmartFusion> <Die::A2F060M3E> <Package::288 CS>
// Author: <Name>
//
///
//`timescale <time_units> / <precision>
module incre_value(
input signed [9:0] ek0,
input signed [9:0] ek1,
input signed [9:0] ek2,
input [3:0] kp,
input [3:0] ki,
input [3:0] kd,
output signed [14:0] d_uk
);
assign d_uk = kp*(ek0 -ek1) + ki*ek0 + kd*((ek0 - ek1)-(ek1 - ek2)); // 计算pid增量
//<statements>
endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
demo_top.v
///
// Company: <Name>
//
// File: demo_top.v
// File history:
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
//
// Description:
//
// <Description here>
//
// Targeted device: <Family::SmartFusion> <Die::A2F060M3E> <Package::288 CS>
// Author: <Name>
//
///
//`timescale <time_units> / <precision>
module demo_top (
input clk, // 时钟信号
input rst_n, // 复位信号
input signed [9:0] target, // 目标值
input signed [9:0] y, // 实际输出值
input [3:0] kp,
input [3:0] ki,
input [3:0] kd,
output signed [14:0] uk0 // pid 输出值
);
wire signed [9:0] ek0;
wire signed [9:0] ek1;
wire signed [9:0] ek2;
error error_inst(
.clk(clk),
.rst_n(rst_n),
.y(y),
.ek0(ek0),
.ek1(ek1),
.ek2(ek2)
);
wire signed [14:0] d_uk; // pid 增量
incre_value incre_value_inst(
.ek0(ek0),
.ek1(ek1),
.ek2(ek2),
.kp(kp),
.ki(ki),
.kd(kd),
.d_uk(d_uk)
);
pid_value pid_value_inst(
.clk(clk),
.rst_n(rst_n),
.d_uk(d_uk),
.uk0(uk0)
);
endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
tb_demo_top.v
///
// Company: <Name>
//
// File: tb_demo_top.v
// File history:
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
// <Revision number>: <Date>: <Comments>
//
// Description:
//
// <Description here>
//
// Targeted device: <Family::SmartFusion> <Die::A2F060M3E> <Package::288 CS>
// Author: <Name>
//
///
//`timescale <time_units> / <precision>
module tb_demo_top();
reg clk;
reg rst_n;
reg signed [9:0] target ; // 目标值
reg signed [9:0] y; // 实际值
reg [3:0] kp; // 比例系数
reg [3:0] ki; // 积分系数
reg [3:0] kd; // 微分系数
wire signed [14:0] uk0;
reg [10:0] i;
reg [8:0] mytxt[0:1997];
initial begin
$readmemh(,mytxt);
clk = 1'b0;
rst_n = 1'b1;
#5 rst_n = 1'b0;
#5 rst_n = 1'b1;
target = 10'd350;
kp = 4'd10;
ki = 4'd9;
kd = 4'd8;
for(i = 0; i<11'd1997; i=i+1)
begin
y = mytxt[i];
#10;
end
end
always #5 clk = ~clk;
demo_top demo_top_tb(.clk(clk),
.rst_n(rst_n),
.target(target),
.y(y),
.kp(kp),
.ki(ki),
.kd(kd),
.uk0(uk0)
);
//<statements>
endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72

