
- 1国产linux x64,腾讯重新发布QQ Linux版,完美适配中兴新支点国产操作系统
- 2阿里云----阿里云新买的数据盘如何挂载使用
- 3代码随想录刷题思路与心得06|454. 383. 15. 18._代码随想录怎么刷题java
- 4java计算机毕业设计基于springboo的高校大学生社团管理系统
- 5针对双非学生计算机保研信息分享_南大人工智能招双非吗
- 6解决eclipse中git中的cannot open git-upload-pack问题
- 7Java中的深拷贝和浅拷贝_深拷 和浅拷 java
- 8Mac电脑安装蚁剑_mac安装蚁剑
- 9NLP实践——以T5模型为例训练seq2seq模型_t5模型下载
- 10Git和Github详细入门教程(别再跟我说你不会Git和Github)_git and github 教程
多旋翼无人机PID调节经验分享(转载自阿木)_无人机的pid整体学习
赞
踩
摘自:https://mp.weixin.qq.com/s/abAkJlnWIVlLCTec7jyLRw
技术专栏|多旋翼无人机PID调节经验分享
原创 阿木实验室 阿木实验室 今天
一、如何看待PID
◆ ◆ ◆
PID(比例+积分+微分)控制是一种校正的调节方式,使实际值与期望值相符。它利用系统误差、误差的微分和积分信号构成控制规律,对被控对象进行调节,具有实现方便、成本低、效果好、适用范围广等优点,因而在实际工程控制中得到了广泛的应用。PID控制器的传递函数为:
如下图 1所示,当执行器的传函为一个二阶系统的传递函数时,假设此时执行器传递函数正确且已经无法再更改,输入设置为幅值为1,频率为0.2hz的三角函数。此时输入与输出(期望值与实际值)相比较如图 2所示。
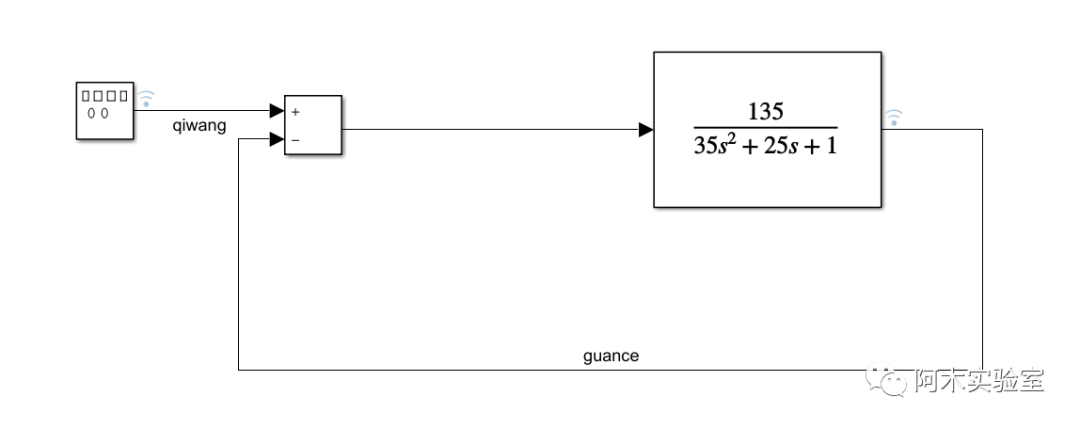
图 1
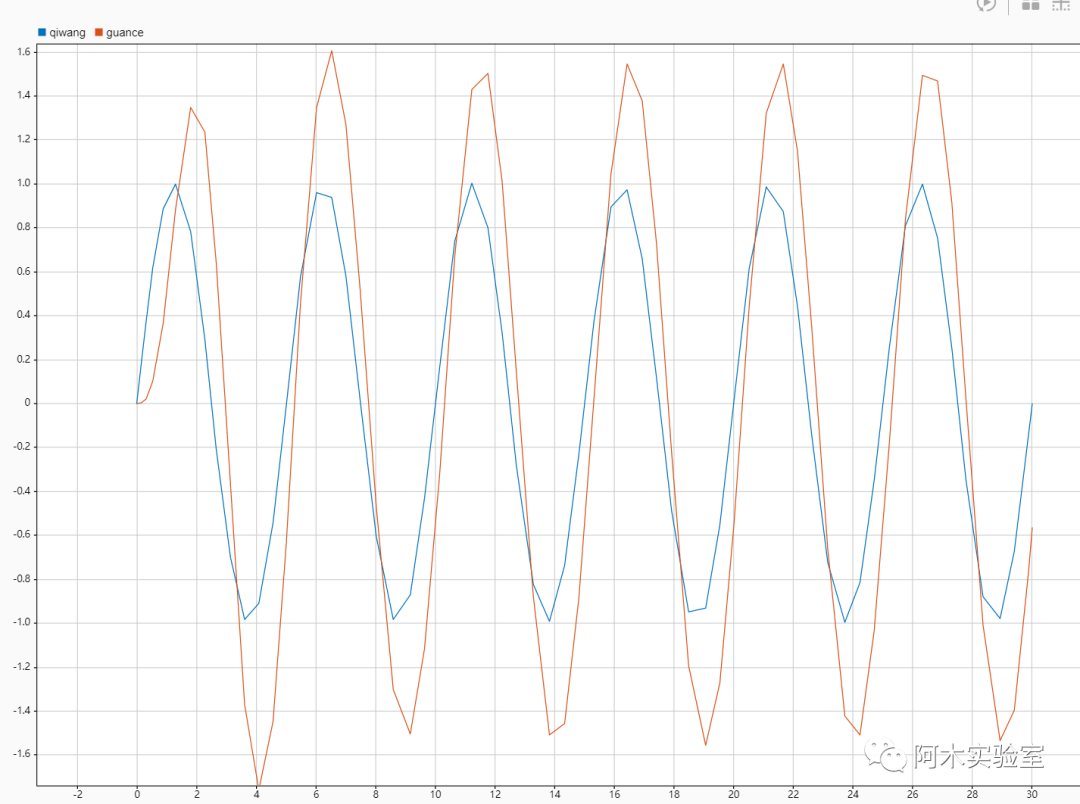
图 2
此时实际观测值与期望值有很大差距,所以需要串联一个装置对输出进行校正,工程中常用的就是PID控制器,如图 3所示。当对PID控制中的参数进行调节以后,校正后的曲线如图 4所示,此时期望值与观测值基本吻合,达到一个较好的调节情况。
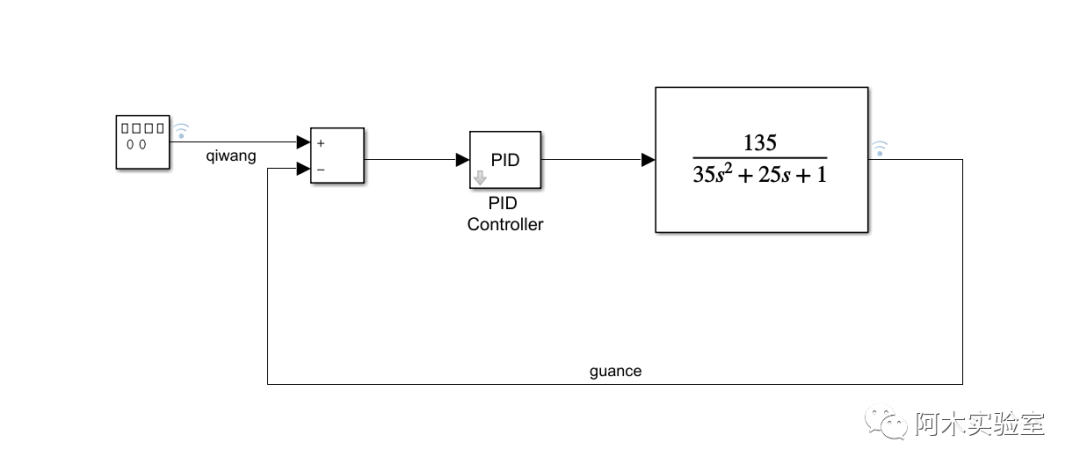
图 3
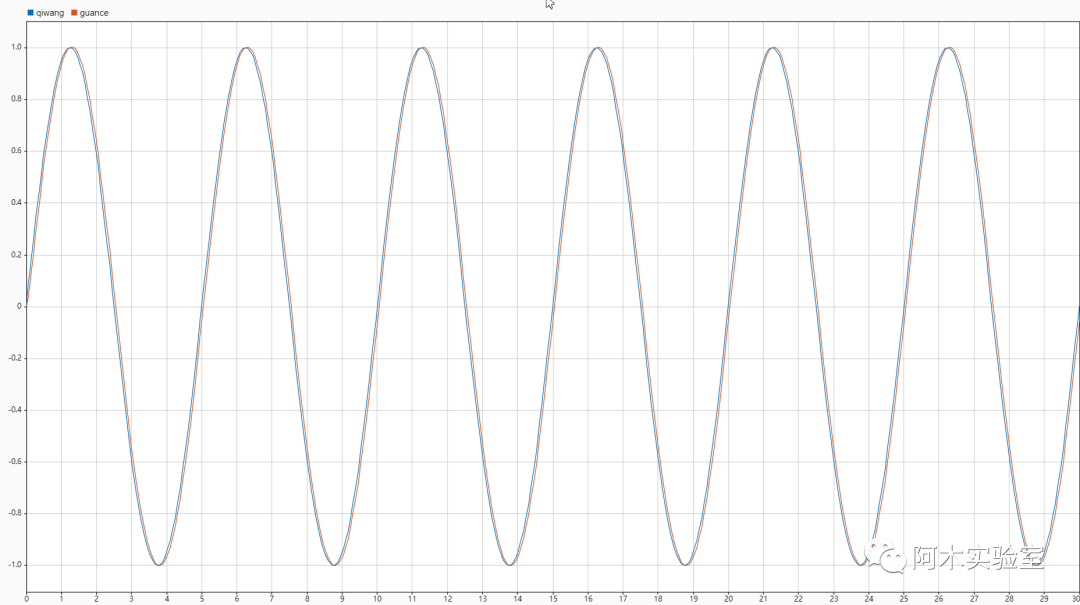
图 4

综合以上,PID的本质就是一种传递函数,当执行器的输出与输入不符合时,用来串联到前向通道中,通过调节PID的三个参数,使输入与输出达到一个吻合的状态。
二、PX4_PID调节经验
◆ ◆ ◆
PX4的控制结构框架如图 5所示:
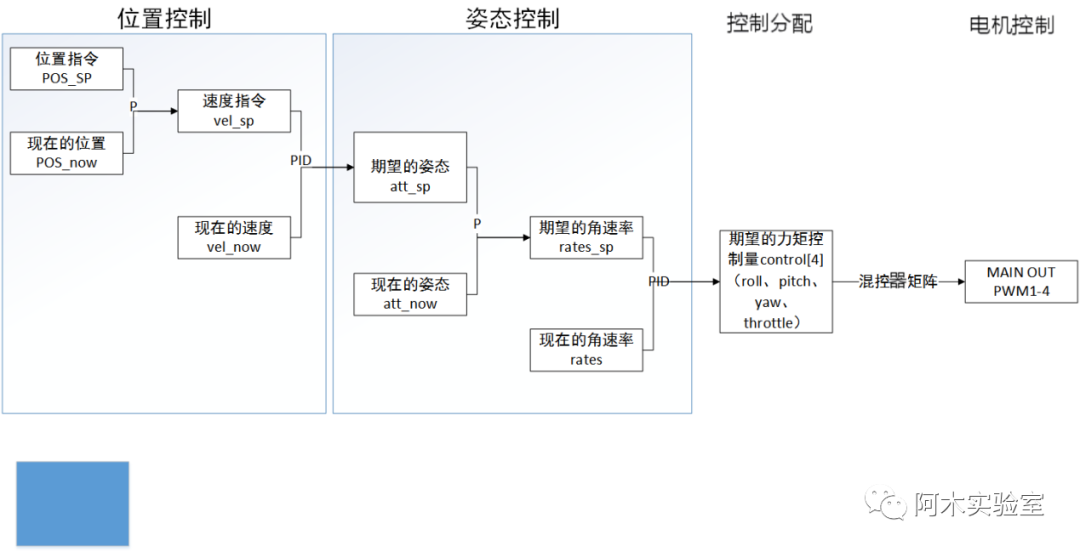
图 5
在调节PX4飞控的PID参数之前,应该先了解下位置控制与姿态控制的关系,位置控制中位置环与速度环的关系,以及姿态控制中能够角度环与角速度环的关系。有兴趣的读者可以在阿木实验室的铂贝学院学习《PX4开发中级课程》。
在这里先讲一下PX4调参的策略,调参要先调姿态控制,再调位置控制。先调内环在再调外环。其中姿态控制界面如图 6所示,位置控制界面如图 7所示。
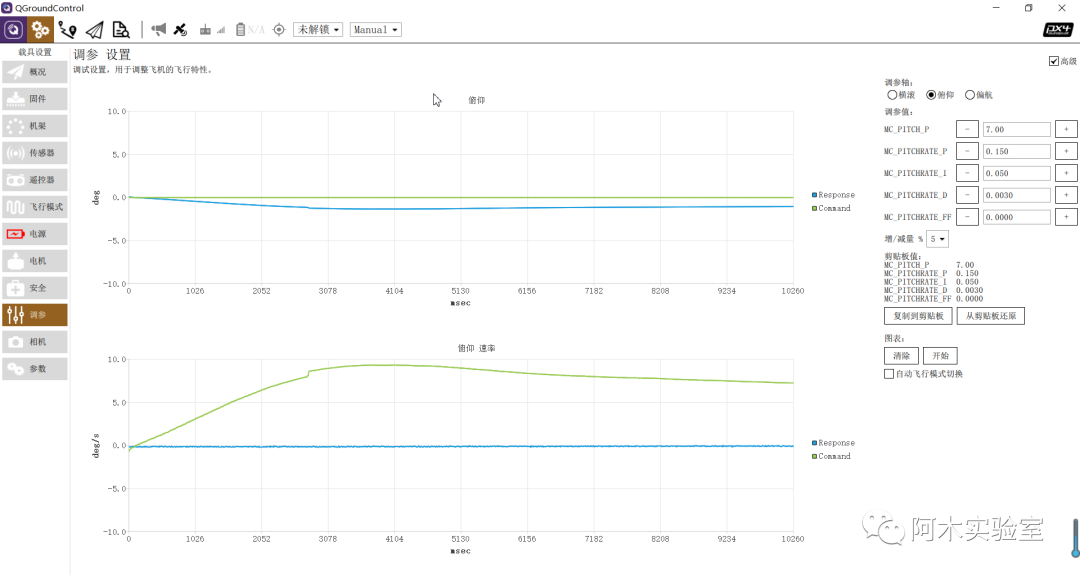
图 6
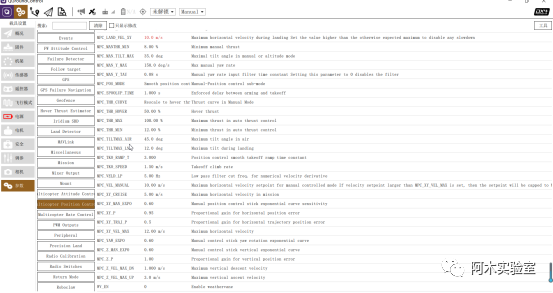
图 7
下面分析一下个人PX4飞控调节pid经验:
1)飞机姿态抖动很厉害。这是因为微分项过高的原因,微分项有加速系统响应的功能,同时也会放大系统的噪声,导致飞机震动,因为四旋翼飞机本身就是一个多输入易受干扰的系统,所以微分项稍微过大的话就会导致飞机抖动非常大。
2)飞机不能定位,有小范围的晃动。这属于震荡现象,有可能是比例项p过大或者过小、积分项i过大的情况,具体要看情况而定,具体事情具体分析。
3)飞机桨叶声音大、机动时有抖动现象。这是姿态控制中比例项p过大的原因,导致飞机对差值控制幅度过大,从而导致有一个较大姿态角输出,导致当前值与上一次值差别很大,而只能在瞬间调节所以才会有抖动的现象。
以上只是看现象调节的一个经验,并不适用与百分百的情况,具体情况要具体分析,要调飞机到一个比较好的状态还需要查看日志,分析飞机的位置、速度、角度的期望值与观测值进行精确的调节。
作者:阿木实验室研发部-孙远航
欢迎各位助教参与投稿~


