
热门标签
热门文章
- 1PyQt5快速入门教程1-PyQt5开发环境的搭建
- 2Arduino开发板控制无刷电机的方法_arduino控制无刷电机
- 3element-ui Form表单验证_element form表单验证
- 4OBCP第七章 OB迁移-备份恢复技术架构及操作方法_ob数据库全量备份
- 5解决:Rabbitmq 消息队列阻塞的问题_rabbitmq 发送消息阻塞
- 6值得学习!阿里P8架构师“墙裂”推荐:Java程序员必读的架构书籍
- 7C语言——预处理_c语言中预处理是什么意思
- 8python代码分析-燃爆!17行Python代码做情感分析?你也可以的
- 9第四章:SpringBoot2.3.0 打包Jar,加载yml或properties配置文件顺序_springboot哪里配置java打包之后的名称
- 10用Python写一个简单的TCP客户端和服务端_python tcp client
当前位置: article > 正文
3.跟随小车STM32_智能跟随小车csdn
作者:知新_RL | 2024-06-01 18:56:07
赞
踩
智能跟随小车csdn
前言
紧接着上一篇博客的内容,上一节内容.我们添加了红外模块.用于实现循迹模块,
这一篇博客,将在上一篇的基础上.添加小车的跟随模块.原理与循迹模块类似
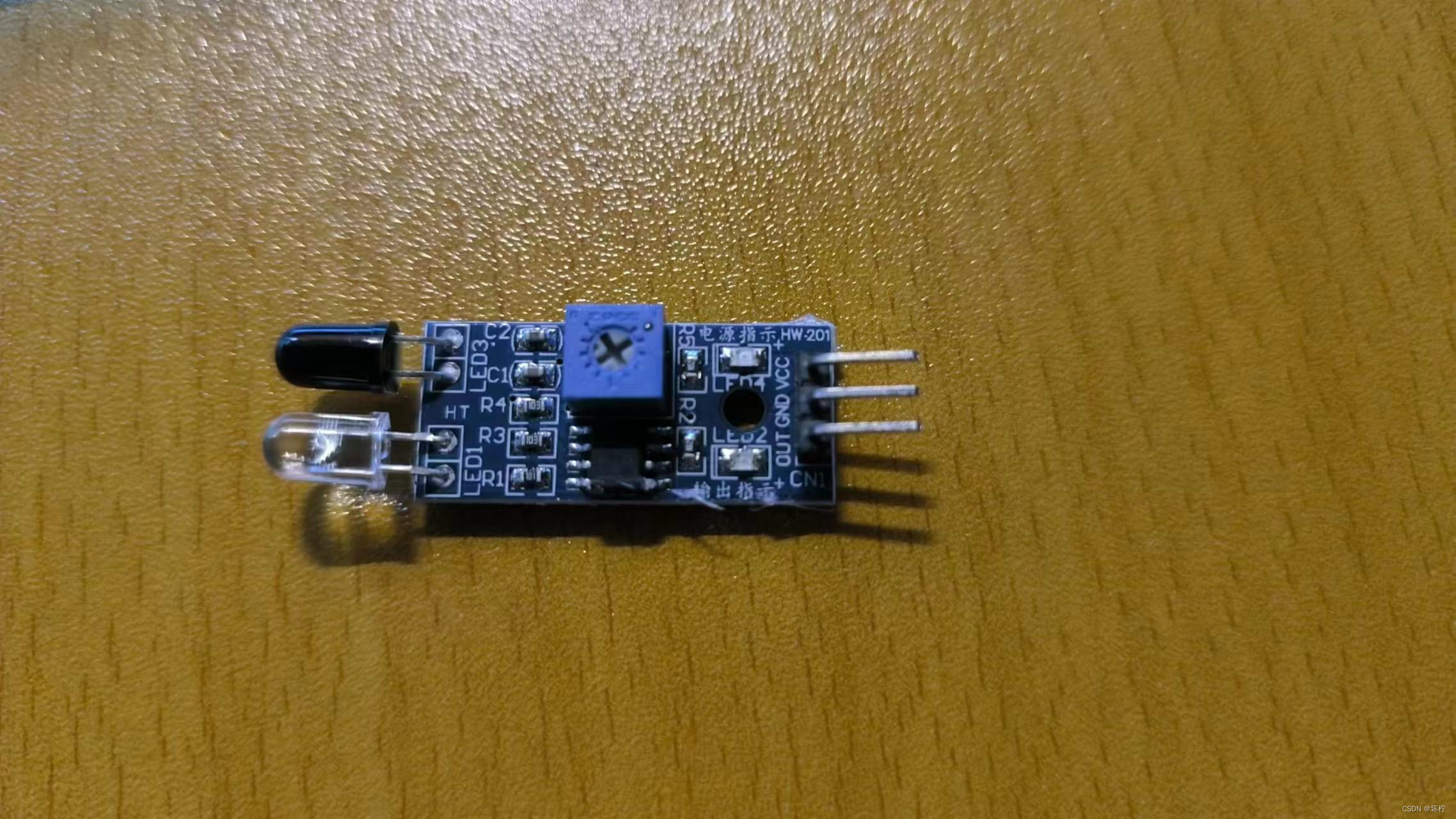
一、红外壁障模块分析
跟随模块与循迹模块类似,都是靠红外的反射.但是跟随模块红外朝外,而循迹模块红外朝下.
如图:
1. 跟随小车实现原理
左边跟随模块能返回红外,输出低电平,右边不能返回,输出高电平,说明物体在左边,需要左转
右边跟随模块能返回红外,输出低电平,左边不能返回,输出高电平,说明物体在右边,需要右转
二、具体实现
1. 硬件接线
B-1A – PA0
B-1B – PB1
A-1A – PA1
A-1B – PB10
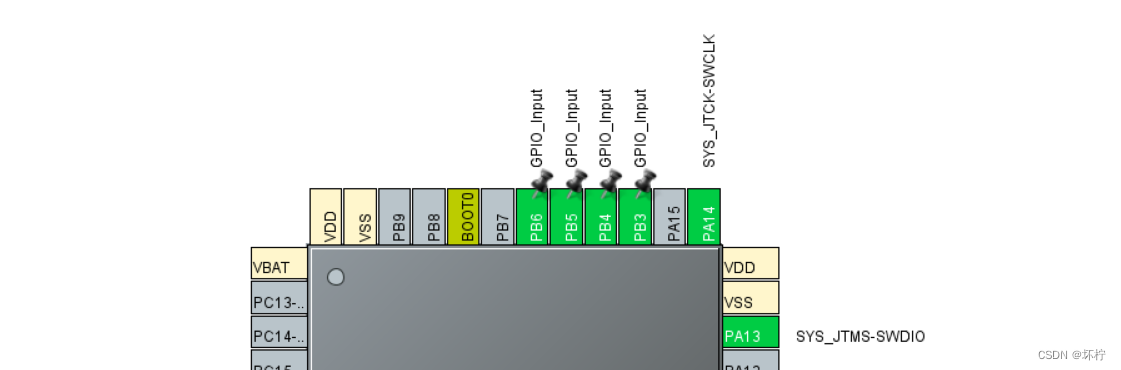
跟随模块(左) – PB5
跟随模块(右) – PB6
2.CUBEMX配置
其他的配置都基于上一篇博客文章的内容.
3. 代码实现
由于上篇代码是循迹模块的代码,所以我们为了保留之前的代码,保留之前的循迹功能,我们可以定义一个全局变量
#define XJMS 1
#define GSMS 2
// 定义全局变量mode
char mode = XJMS;
- 1
- 2
- 3
- 4
- 5
然后通过串口1中断,对他进行修改,串口用蓝牙模块进行连接控制.
提示:蓝牙模块需将波特率设置为9600,至少我的蓝牙模块需要
由于代码太长了,就将代码封装到一个文件中
motor.c
#include "motor.h" #include "gpio.h" #include "tim.h" // 左轮动 void goForward(void) { //前进 __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,200); __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,200); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET); } void turnLeft(void) { //左转 __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,80); __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,200); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET); } void turnRight(void) { //右进 __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,200); __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,80); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET); } void stop(void) { //停止 __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,0); __HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,0); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
main.c
if(mode == XJMS) { if(LEFTWHEEL == GPIO_PIN_RESET && RIGHTWHEEL == GPIO_PIN_RESET) { goForward(); } if(LEFTWHEEL == GPIO_PIN_SET && RIGHTWHEEL == GPIO_PIN_RESET) { turnLeft(); } if(LEFTWHEEL == GPIO_PIN_RESET && RIGHTWHEEL == GPIO_PIN_SET) { turnRight(); } if(LEFTWHEEL == GPIO_PIN_SET && RIGHTWHEEL == GPIO_PIN_SET) { stop(); } } if(mode ==GSMS){ if(LEFTWT == GPIO_PIN_RESET && RIGHTWT == GPIO_PIN_RESET) { goForward(); } if(LEFTWT == GPIO_PIN_SET && RIGHTWT == GPIO_PIN_RESET) { turnRight(); } if(LEFTWT == GPIO_PIN_RESET && RIGHTWT == GPIO_PIN_SET) { turnLeft(); } if(LEFTWT == GPIO_PIN_SET && RIGHTWT == GPIO_PIN_SET) { stop(); } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/知新_RL/article/detail/658986
推荐阅读
相关标签

