
- 1力扣第92题——反转链表 II(C语言题解)_力扣反转链表2
- 2gitlab 更新子模块_gitlab更新子模块
- 3Chrome浏览器:Your Connection is not private 您的连接不是私密连接
- 4Dofbot机械臂从零部署笔记(3)——ROS之Moveit下实现顺向运动学规划+实机同步运动_dofbot虚拟机movit驱动真机
- 5macbookpro强制重启方法及CleanMyMac怎么清理mac缓存
- 6工具栏QToolBar-样式_qtoolbar样式
- 7matplotlib绘制多张图、多子图、多例图_matplotlib同时绘制8个图
- 8Docker 安装mysql Mac 环境下
- 9Web前端开发技术、详细文章、(例子)html 列表、有序列表、无序列表、列表嵌套
- 10引用实战学习
车牌号识别系统:PyQT5+QT Designe+crnn/PaddleOCR+YOLO+OpenCV矫正算法。_qt车牌识别csdn
赞
踩
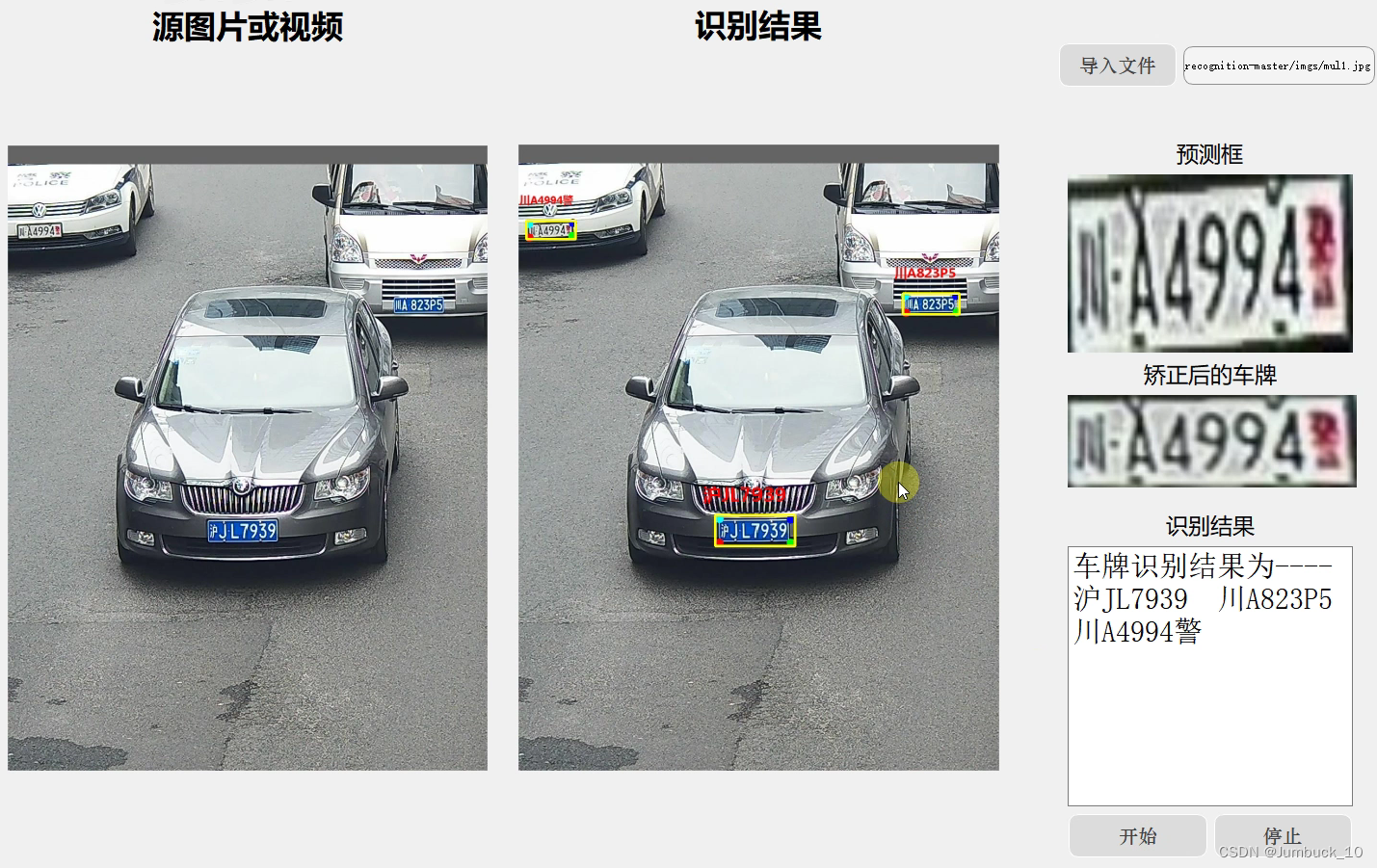
PyQT5&QT Designe+crnn/PaddleOCR+YOLO+传统OpenCV矫正算法。可视化的车牌识别系统项目。
项目绪论
1.项目展示
要实现的效果如下图所示
2.视频展示
视频展示链接(展示的另一个瓶盖生产日期检测项目):https://www.bilibili.com/video/BV1K1421673E/
3.整体思路
还是先给出整体思路
1.第一步需要用QT把界面呈现出来
2.第二步用YOLO把车牌位置检测出来
3.第三步,由于第二步检测出来的车牌不一定是正的,所以采用简单的传统OpenCV算法把歪的车牌矫正一下
4.第四步,使用字符识别算法如PaddleOCR或crnn等对矫正后的车牌图像进行字符识别
5.第五步,在QT界面上把识别出的内容展示出来
一、PyQT5 和 QT Designer
1.简介
PyQt5是Python编程语言的一个GUI(图形用户界面)工具包,它允许开发人员使用Python语言创建桌面应用程序。PyQt提供了许多用于创建丰富多样的用户界面的类和功能,以及用于处理用户输入和交互的工具。
而Qt Designer是PyQt程序UI界面的实现工具,使用Qt Designer可以拖拽、点击完成GUI界面设计,并且设计完成的.ui程序可以转换成.py文件供python程序调用。
因此结合PyQT5和QT Designer,可以采用直接拖拽和写代码二者结合的方式,快速实现界面的设计。
2.安装
在PyCharm里面安装PyQt5和QT工具包(如果报错可以切别的镜像源,更多镜像源在附录第一节),其中PyQT5-tools中就包括QT Designer
pip install PyQt5 -i https://pypi.douban.com/simple
pip install PyQt5-tools -i https://pypi.douban.com/simple
- 1
- 2
3.使用
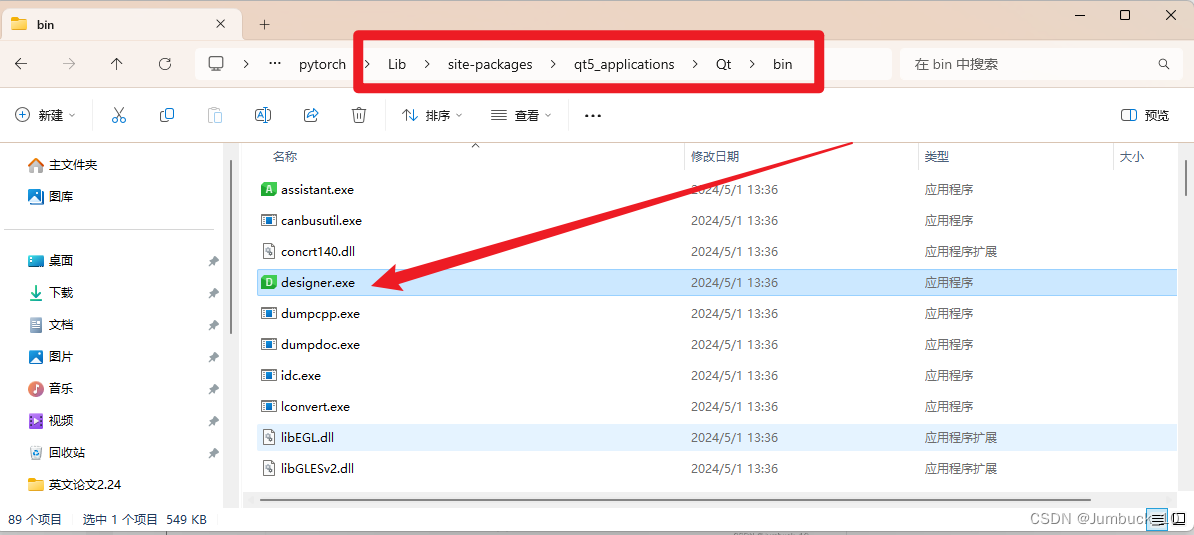
下载完成之后,在虚拟环境的文件夹下,找到
\Lib\site-packages\qt5_applications\Qt\bin,点击designer.exe,即可直接进入QT Designer设计界面。
在此界面中,选择默认的Widget,然后直接创建即可
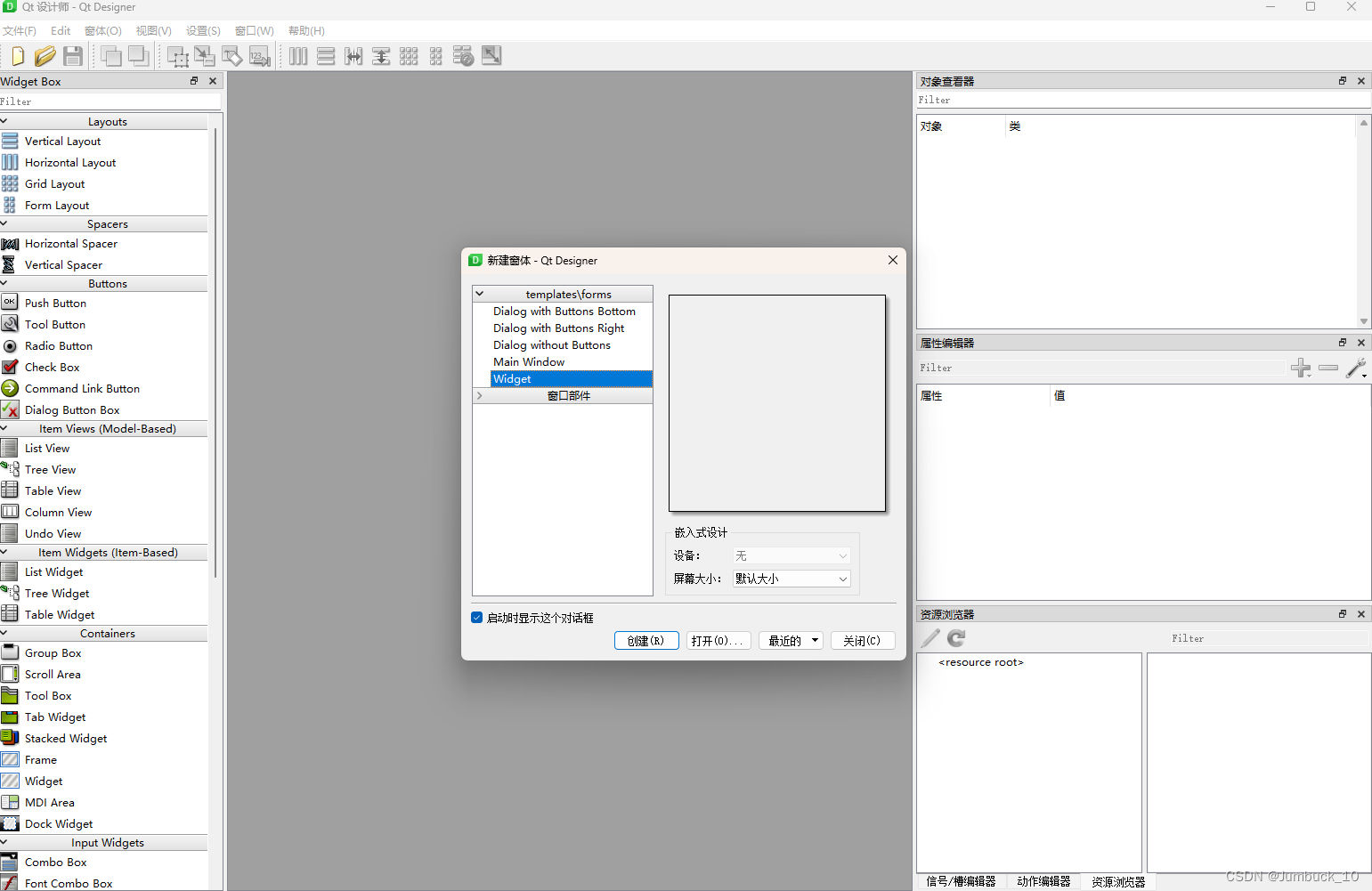
左侧栏可以选择一些插件,其中最常用的插件如下:
QLabel可以显示图像、文本等等(可以放文字)
QPushButton是按钮,用于响应事件
- 1
- 2
通过上述插件,我们已经通过可视化界面设计出一个简易的可视化界面了。
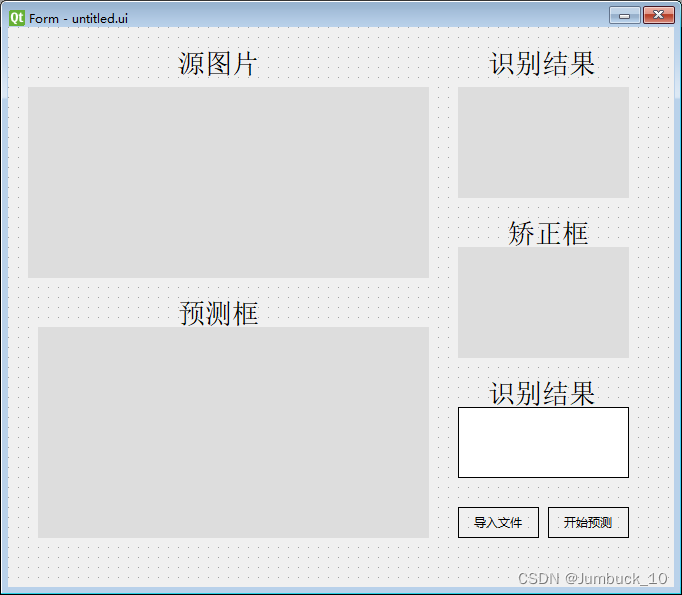
ctrl+s保存直接生成一份.ui为后缀的文件(文件默认名称为untitled.ui),
然后再使用如下指令:
pyuic5 -o untitled.py untitled.ui
- 1
将untitled.ui变为可以通过编译器执行的untitled.py。
生成的文件中,基础结构如下:
class Ui_Form(object): def setupUi(self, Form): Form.setObjectName("Form") Form.resize(666, 560) ...... # 定义的几个按钮 self.pushButton = QtWidgets.QPushButton(Form) self.pushButton.setGeometry(QtCore.QRect(450, 480, 81, 31)) self.pushButton.setStyleSheet("border:1px solid black") self.pushButton.setObjectName("pushButton") ...... # 对应的按钮响应方法 # 导入文件 self.pushButton.clicked.connect(self.browse_image) # 开始预测 self.pushButton_2.clicked.connect(self.predict_image)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
随后我们在setupUi即定义各种组件的相应方法,如上代码的最后两行。
其中pushButton_2为代码中定义的按钮,predict_image为下方我们自己定义的相应方法。即:现在已经把predict_image和pushButton_2进行链接了,点击pushButton_2对应的按钮,响应predict_image方法
二、YOLO检测算法

使用标注过的数据集对车牌区域进行识别,识别效果如下图所示

YOLO算法本身也属于老生常谈的技术了,因此不在这里过多赘述,有疑问的同学可以翻一下博主之前的博客。
三、OpenCV矫正算法
识别出来的车牌可能非正,如下图所示,这样会给后续的字符识别工作带来困难
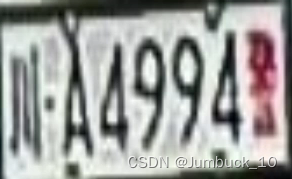
因此我们使用OpenCV的矫正算法,对其进行校正
我们这里使用透视矫正:在图像中存在透视变换时,矫正算法可以将图像中的对象转换为在一个平面上的投影,以消除透视效应,从而更容易进行后续的分析和处理。透视矫正通常用于计算机视觉、机器人导航、虚拟现实等领域。
矫正的具体代码如下所示
import cv2 import numpy as np # 读取图像 imgPath = "D:\PythonCode\pyQT\warpMethods\data\\2.png" image = cv2.imread(imgPath) cv2.imshow('dilated Box', image) cv2.waitKey(0) # 将图像转换为灰度图像 gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) cv2.imshow('dilated Box', gray) cv2.waitKey(0) # 二值化处理 _, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) # 膨胀操作,用于连接相邻的文字 kernel = np.ones((5,5), np.uint8) dilated = cv2.dilate(binary, kernel, iterations=3) cv2.imshow('dilated Box', dilated) cv2.waitKey(0) # 腐蚀操作,用于消除细小的噪声 eroded = cv2.erode(dilated, kernel, iterations=3) cv2.imshow('eroded Box', eroded) cv2.waitKey(0) # 查找轮廓 contours, hierarchy = cv2.findContours(eroded, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 获取所有文本区域的最小外接矩形 boxes = [] for contour in contours: rect = cv2.minAreaRect(contour) box = cv2.boxPoints(rect) box = np.int0(box) boxes.append(box) # 将所有文本区域的矩形框合并为一个大矩形框 merged_box = cv2.minAreaRect(np.concatenate(boxes)) # 提取矩形框的角点 rect_points = cv2.boxPoints(merged_box) # 将角点转换为整数类型 rect_points = np.int0(rect_points) print(rect_points) # 在图像上绘制合并后的矩形框 cv2.drawContours(image, [rect_points], 0, (0, 255, 0), 2) # 显示结果 cv2.imshow('Merged Box', image) cv2.waitKey(0) cv2.destroyAllWindows() # 提取矩形框的角点并转换为浮点数类型的 NumPy 数组 src_pts = cv2.boxPoints(merged_box) src_pts = np.float32(src_pts) # 定义目标点 dst_pts = np.float32([[0, merged_box[1][1]-1], [0, 0], [merged_box[1][0]-1, 0], [merged_box[1][0]-1, merged_box[1][1]-1]]) # 获取透视变换矩阵 M = cv2.getPerspectiveTransform(src_pts, dst_pts) # 执行透视变换,校正文本区域 corrected_image = cv2.warpPerspective(image, M, (int(merged_box[1][0]), int(merged_box[1][1]))) # 检查纵向长度是否比横向长度长,如果是则翻转图像 if corrected_image.shape[0] > corrected_image.shape[1]: corrected_image = cv2.rotate(corrected_image, cv2.ROTATE_90_CLOCKWISE) # 显示结果 cv2.imshow('Corrected Image', corrected_image) cv2.waitKey(0) cv2.destroyAllWindows()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
四、crnn/PaddleOCR字符识别算法
文本识别是图像领域的一个常见任务,场景文字识别OCR任务中,需要先检测出图像中文字位置,再对检测出的文字进行识别,文节介绍的CRNN模型可用于后者, 对检测出的文字进行识别。

crnn存在不足的地方是它只能预测一行数据,因此多行数据不能进行预测,我们这里的车牌仅一行,但是如果有同学是识别多行的任务,则需要写个脚本对图像的进行分离,具体代码如下所示:
# 将图像分成上下两段 height = img.shape[0] half_height = height // 2 upper_img = img[:half_height, :] lower_img = img[half_height:, :] # 对上半部分进行预测 upper_img = Image.fromarray(upper_img) upper_image = upper_img.convert('L') upper_image = transformer(upper_image) if torch.cuda.is_available(): upper_image = upper_image.cuda() upper_image = upper_image.view(1, *upper_image.size()) upper_image = Variable(upper_image) model.eval() upper_preds = model(upper_image) _, upper_preds = upper_preds.max(2) upper_preds = upper_preds.transpose(1, 0).contiguous().view(-1) upper_preds_size = Variable(torch.IntTensor([upper_preds.size(0)])) upper_raw_pred = converter.decode(upper_preds.data, upper_preds_size.data, raw=True) upper_sim_pred = converter.decode(upper_preds.data, upper_preds_size.data, raw=False) print('Upper prediction: %-20s => %-20s' % (upper_raw_pred, upper_sim_pred)) # 对下半部分进行预测 lower_img = Image.fromarray(lower_img) lower_image = lower_img.convert('L') lower_image = transformer(lower_image) if torch.cuda.is_available(): lower_image = lower_image.cuda() lower_image = lower_image.view(1, *lower_image.size()) lower_image = Variable(lower_image) lower_preds = model(lower_image) _, lower_preds = lower_preds.max(2) lower_preds = lower_preds.transpose(1, 0).contiguous().view(-1) lower_preds_size = Variable(torch.IntTensor([lower_preds.size(0)])) lower_raw_pred = converter.decode(lower_preds.data, lower_preds_size.data, raw=True) lower_sim_pred = converter.decode(lower_preds.data, lower_preds_size.data, raw=False) print('Lower prediction: %-20s => %-20s' % (lower_raw_pred, lower_sim_pred)) words = upper_sim_pred + "\n" + lower_sim_pred
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
如果只是为了方便我们也可以使用paddleocr提供的远端服务方式进行访问。这样精度更高且不用配置环境,博主试了一下精度特别高,基本能满足简易条件下的数据。
访问方法如下所示:
import base64 import json import urllib import requests def main(): url = "https://aip.baidubce.com/rest/2.0/ocr/v1/general_basic?access_token # image 可以通过 get_file_content_as_base64("C:\fakepath\1.bmp",True) 方法获取 payload = '&detect_language=false¶graph=false&probability=false' headers = { 'Content-Type': 'application/x-www-form-urlencoded', 'Accept': 'application/json' } response = requests.request("POST", url, headers=headers, data=payload) result_str = response.text # 解析 JSON 字符串 data = json.loads(result_str) # 提取出 words 后的两个字符串 if "words_result" in data: words_result = data["words_result"] if len(words_result) >= 2: word1 = words_result[0]["words"] word2 = words_result[1]["words"] print("提取结果:", word1, word2) else: print("Error: 'words_result' 中的元素数量不足 2") else: print("Error: 没有找到 'words_result' 键") result_str = word1+'\n' + word2 print(result_str) def get_file_content_as_base64(path, urlencoded=False): """ 获取文件base64编码 :param path: 文件路径 :param urlencoded: 是否对结果进行urlencoded :return: base64编码信息 """ with open(path, "rb") as f: content = base64.b64encode(f.read()).decode("utf8") if urlencoded: content = urllib.parse.quote_plus(content) return content if __name__ == '__main__': main()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
其中token需要替换成自己的(需要的同学多的话可以专门出一期PaddleOCR部署的博文)
五、QT界面中对得到的检测结果进行展示
具体逻辑为:
- 点击图片预测后,把图像路径传给predict_image( self.file_path定义为公共,因此可以直接访问)
- 使用YOLOv5Detect 中的predict方法,使用该文件路径,对其进行一系列的预测(具体方法如上文所示),即,先用yolo检测、再用opencv进行校正、最后使用paddleocr进行字符识别
- 拿到返回的数据,使用setPixmap显示到QT界面上。
from YOLOv5Detect import predict def predict_image(self): try: if self.file_path: # 这里执行图像预测的逻辑,例如调用预测模型 print("预测图片路径:", self.file_path) # 在这里使用 self.file_path 进行图像预测 predImg,cropped_image,warpImg,words = predict(self.file_path) # 假设 predict 函数返回处理后的图像数组 if predImg is not None and isinstance(predImg, np.ndarray): pixmap = self.convert_array_to_pixmap(predImg) self.output_img.setPixmap(pixmap.scaled(self.output_img.size(), Qt.KeepAspectRatio)) if cropped_image is not None and isinstance(cropped_image, np.ndarray): pixmap = self.convert_array_to_pixmap(cropped_image) self.yucekuang_img.setPixmap(pixmap.scaled(self.yucekuang_img.size(), Qt.KeepAspectRatio)) if warpImg is not None and isinstance(warpImg, np.ndarray): pixmap = self.convert_array_to_pixmap(warpImg) self.jiaozhenghou_img.setPixmap(pixmap.scaled(self.yucekuang_img.size(), Qt.KeepAspectRatio)) if words: self.shibiejieguo_kuang.setText(words) else: print("预测函数返回无效的图像数组") else: print("请先选择图片") except Exception as e: print("预测图像时发生异常:", str(e))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
六、源码获取
为了方便大家文档及论文撰写,博主更新了一篇五千字的技术细节文档,有需要可以联系.
<1831255794---q>
- 1
附录
1.安装包国内镜像
清华大学镜像源: https://pypi.tuna.tsinghua.edu.cn/simple/ 阿里云镜像源: http://mirrors.aliyun.com/pypi/simple/ 中国科技大学镜像源: https://pypi.mirrors.ustc.edu.cn/simple/ 华中科技大学镜像源: http://pypi.hustunique.com/simple/ 上海交通大学镜像源: https://mirror.sjtu.edu.cn/pypi/web/simple/ 豆瓣镜像源: http://pypi.douban.com/simple/ 山东理工大学镜像源: http://pypi.sdutlinux.org/ 百度镜像源: https://mirror.baidu.com/pypi/simple 使用方法: pip install <安装包> -i <镜像源>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26

