
热门标签
热门文章
- 1Verilog RTL新手实验分析总结_rtl-p实验
- 2python kaggle数据分析实战_适合做数据分析的kaggle数据集csdn
- 3DB-GPT: 用私有化LLM技术定义数据库下一代交互方式_dbgpt功能
- 4一文搞懂什么是粒子群优化算法(Particle Swarm Optimization,PSO)【附应用举例】
- 5太原理工大学软件学院信息安全课程设计DAY1_太原理工大学软件安全技术实验
- 6算法009:长度最小的子数组
- 7Ubuntu20.10_pixelbook ubuntu
- 8字节跳动iOS客户端实习面试---前两面过了,第三面HR天坑!竟然跟我说……_ios字节跳动
- 9【C++庖丁解牛】哈希表/散列表的设计原理 | 哈希函数_c++中哈希表的原理
- 10 关于MySQL的lock wait timeout exceeded解决方案
当前位置: article > 正文
arduino 蓝牙控制 JQ8400播放音频_jq8400fl-10p电路图
作者:知新_RL | 2024-06-12 06:50:15
赞
踩
jq8400fl-10p电路图
记录一下吧,简单地实现了arduino 连接蓝牙,发送指令控制音频播放。
JQ8400 使用的是一线串口通讯,电路图如下:
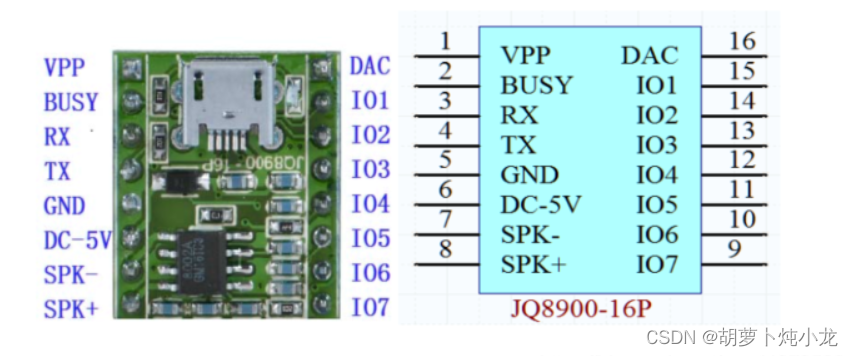
引脚功能如下: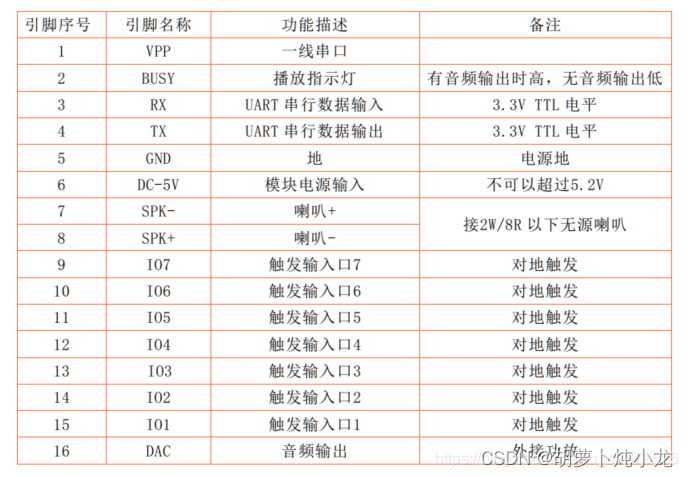
- #include <SoftwareSerial.h>
- #include <Servo.h>
- //使用软件串口,能讲数字口模拟成串口
- SoftwareSerial BT(6, 7); //新建对象,接收脚为6,发送脚为7
- char val ; //存储接收的变量
-
- Servo myservo1;//定义舵机1变量名
- Servo myservo2;//定义舵机2变量名
-
- void setup() {
- Serial.begin(9600); //与电脑的串口连接
- Serial.println("BT is ready!");
- BT.begin(9600); //设置波特率
- pinMode(3,OUTPUT);
- myservo1.attach(9);//定义舵机接口(9、10 都可以,缺点只能控制2 个)
- myservo2.attach(10);//定义舵机接口(9、10 都可以,缺点只能控制2 个)
- }
-
- void loop() {
- // 如果串口接收到数据,就输出到蓝牙串口
- if (Serial.available()) {
- val = Serial.read();
- BT.print(val);
- }
-
- //如果接收到蓝牙模块的数据,输出到屏幕
- if (BT.available()) {
- val = BT.read();
- Serial.println(val);
- if(val == '1'){
- Serial.println("da a1!!");
- myservo1.write(0);//设置舵机旋转的角度
- //发送0x01
- SendData(0x0a);
- SendData(0x01);
- SendData(0x0b);
- val = "";
- delay(5000);
- myservo1.write(90);//设置舵机旋转的角度
- }
- if(val == '2'){
- myservo2.write(180);//设置舵机旋转的角度
- SendData(0x0a);
- SendData(0x02);
- SendData(0x0b);
- val = "";
- delay(5000);
- myservo2.write(90);//设置舵机旋转的角度
- }
- if(val == '3'){
- SendData(0x0a);
- SendData(0x03);
- SendData(0x0b);
- val = "";
- }
- if(val == '4'){
- SendData(0x0a);
- SendData(0x04);
- SendData(0x0b);
- val = "";
- }
- if(val == '5'){
- myservo1.write(0);//设置舵机旋转的角度
- SendData(0x0a);
- SendData(0x05);
- SendData(0x0b);
- val = "";
- delay(4000);
- myservo1.write(90);//设置舵机旋转的角度
- }
- if(val == '6'){
- myservo2.write(180);//设置舵机旋转的角度
- SendData(0x0a);
- SendData(0x06);
- SendData(0x0b);
- val = "";
- delay(4000);
- myservo2.write(90);//设置舵机旋转的角度
- }
- }
- }
-
- //语音模块函数
- void SendData (char addr )//发送函数。
- {
- digitalWrite(3,HIGH); /*开始拉高*/
- delayMicroseconds ( 1000 );
- digitalWrite(3,LOW); /*开始引导码*/
- delayMicroseconds ( 3200 );/*此处延时最少要大于2ms*/
- for (int i = 0; i < 8; i++ ) /*总共8位数据 */
- {
- digitalWrite(3,HIGH);
- if ( addr & 0x01 ) /*3:1表示数据位1,每个位用两个脉冲表示 */
- {
- delayMicroseconds ( 600 );
- digitalWrite(3,LOW);
- delayMicroseconds ( 200 );
- }
- else /*1:3表示数据位0 ,每个位用两个脉冲表示 */
- {
- delayMicroseconds ( 200 );
- digitalWrite(3,LOW);
- delayMicroseconds ( 600 );
- }
- addr >>= 1;
- }
- digitalWrite(3,HIGH);
- }

利用蓝牙发送1、2、3、4、5、6然后判断播放不同音乐。(音乐要提前存进JQ8400,命名按手册规范)
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/知新_RL/article/detail/706864
推荐阅读
相关标签

