
- 1Mac 转UTF-8编码格式_mac如何txt保存为utf8
- 2浅谈学习网络安全技术必备的一些网络基础知识
- 3ollama-python-Python快速部署Llama 3等大型语言模型最简单方法_python ollama
- 4我在华为OD的total++天(持续更新)_华为od等级d1-d5薪资表
- 5服务器自带的校时ip是多少钱,国内大概可用的NTP时间校准服务器IP地址
- 6(二)结构型模式:4、组合模式(Composite Pattern)(C++实例)_公司组织架构采用组合模式
- 7Zookeeper 安装教程和使用指南_zk 安装完后如何使用
- 8Python日志logging实战教程_line 46, in
from utils.loggers import log - 9PHP内核芒果同城获客+Ai混剪系统源码_ai素材视频混剪 源码
- 10ElementUI:设置table的背景透明、根据表格情况设置背景色、设置文字颜色、文字左右间距、表头_eltable透明背景
详解基于图卷积的半监督学习_spectral propagation
赞
踩
Kipf和Welling最近发表的一篇论文提出,使用谱传播规则(spectral propagation)快速近似spectral Graph Convolution。

和之前讨论的求和规则和平均规则相比,谱传播规则的不同之处在于聚合函数。它使用提升到负幂的度矩阵D对聚合进行归一化这一点与平均规则类似,但是它的归一化是不对称的。让我们一起来看看。
Aggregation as a weighted sum
我们可以理解,前面提到的聚合函数是加权和,其中每个聚合规则选择不同的权重。在讲解spectral rule之前,先看看平均规则的过程。
The Sum Rule
使用求和规则计算第i个节点的聚合特征,计算过程如下:
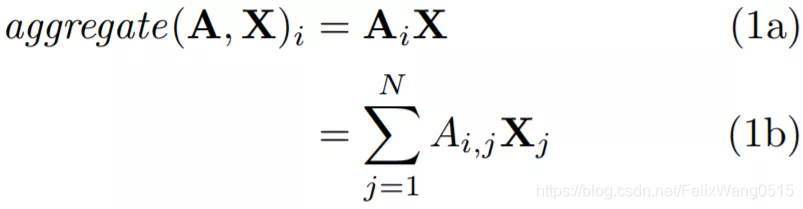
如方程式1a所示,第i个节点的聚合特征表示为向量矩阵乘积,我们可以将这个矩阵乘积表示为一个简单的加权和,如方程1b所示,对X中的每一行求和。
1b中,第j个节点在聚合中的权重由A的第i行、第j列的值确定。由于A是邻接矩阵,当节点j与节点i为邻居时,该值为1,否则为0。因此,1b简化为对第i个节点的邻居节点的特征表示求和。
总的来说,每个邻居的贡献取决于邻接矩阵定义的邻域。
The Mean Rule
要了解平均规则如何聚合节点表示,我们还是看如何计算第i行,现在使用平均规则。为了简单起见,我们只考虑“原始”邻接矩阵上的平均规则,而不考虑A和矩阵I之间的加法,这仅仅对应于向图中添加自循环。
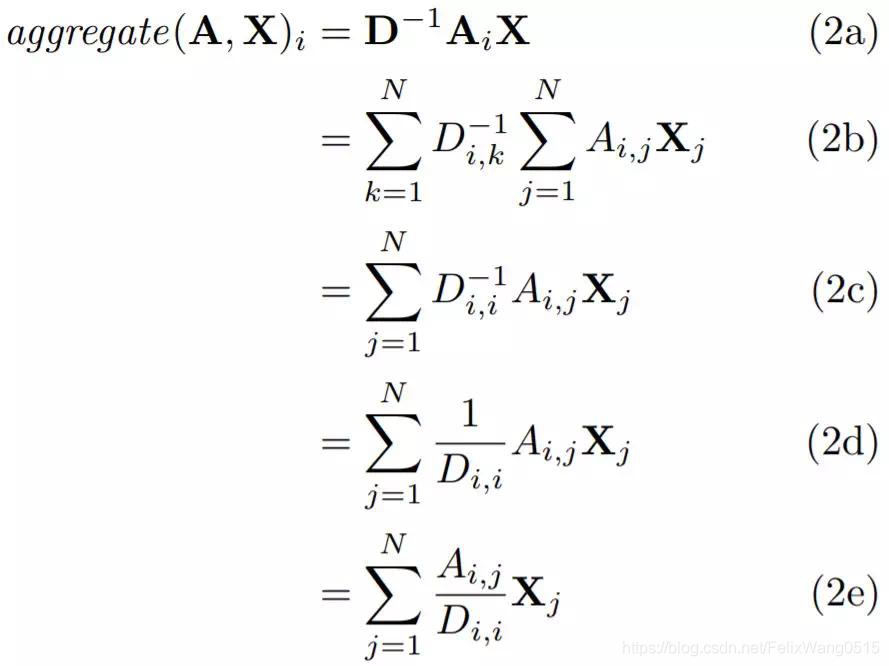
看上面的公式,求导过程明显更长了。在方程2a中,我们首先转换邻接矩阵A,把它乘上D(度矩阵)的逆矩阵。在2b中有更加明确的计算。D-1是一个对角矩阵,沿对角线的值是节点的反度(inverse degree),也就是说位置(i,i)的值是节点i的反度(inverse degree)。因此,我们可以移除其中一个求和符号,得到方程2c。2c可以进一步变形得到2d和2e。
如方程2e所示,我们再次邻接矩阵中的每一行求和。在求和过程中提到的,这相当于对每个节点的邻居求和。不同的是,我们要保证2e中的加权和的权重于第i个节点的度相加等于1。因此,2e对应第i个节点的邻居特征表示的平均值。
The Spectral Rule
那么现在我们来看看Spectral 规则。
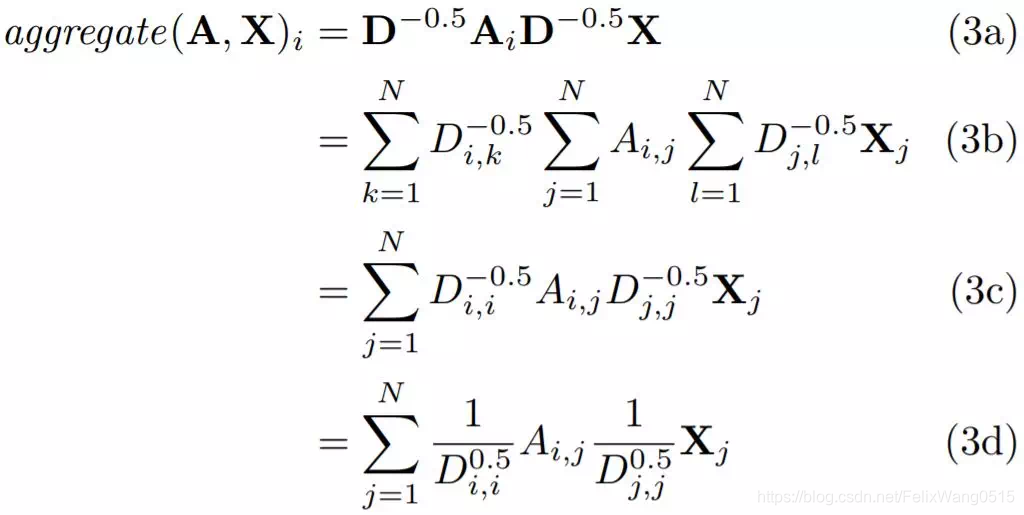
平均规则中,我们使用度矩阵D转换邻接矩阵A。上图中的3a所示,我们将D的幂提高到-0.5,然后乘上矩阵A的每一边。该操作如3b所示,D是对角矩阵,因此我们可以进一步简化方程3b,得到3d。
方程3e很有趣,当我们计算第i个节点的聚合特征表示时,我们不仅要考虑节点i的度,还要考虑节点j的度。
类似平均规则,Spectral 规则对聚合结果进行归一化,使得聚合特征表示与输入特征大致保持相同的比例。不同的是,如果邻居的度低,则加权和中的权重高,如果邻居的度高,则加权和中的权重低。当低度邻居提供比高度邻居更有用的信息时,这种处理便起作用了。
用GCN进行半监督分类
除了Spectral 规则,Kipf和Welling还演示了GCNs用来进行半监督分类。在半监督学习中,我们希望既有标记样本,也有未标记样本。也就是说,我们知道所有的节点,但是不知道所有节点的标签。
在上述的规则中,我们聚合节点邻域,因此共享邻居的节点往往具有相似的特征表示。如果图具有同质性,这属性将很有用,即有连接的节点往往相似(即有相同的标签)。同质性在很多真实的网络中都存在,特别是社交网络。
即使是随机初始化的GCN,仅仅通过使用图结构,也可以很好地分离同质图中节点的特征表示。我们可以在标记节点上训练GCN,通过更新所有节点共享的权重矩阵,有效的将节点标签信息传播给为标记的节点,从而进一步推进上述步骤。具体如下:
- 通过GCN执行前向传播;
- 在GCN最后一层逐行应用sigmoid函数;
- 计算已知节点标签上的交叉熵损失;
- 反向传播损失并更新每层中的权重矩阵W。
空手道俱乐部的社交网络预测
空手道俱乐部
Zachary空手道俱乐部是一个小型的社交网络,在这里,俱乐部管理员和教练之间会发生冲突。任务是预测,当冲突发生时,俱乐部成员会站在哪一边。俱乐部社交网络图表示如下:
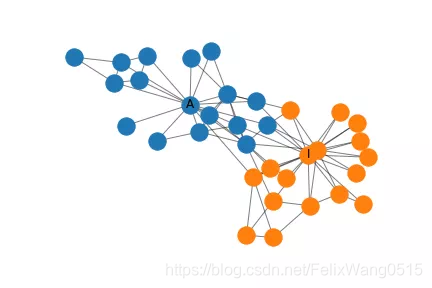
每个节点表示俱乐部的每个成员,成员之间的连接表示他们在俱乐部外进行的交互。管理员用是节点A,教练是节点I。
Spectral Graph Convolutions in MXNet
我使用MXNet实现Spectral 规则,MXNet是一个容易实现的高效的深度学习框架,具体如下:
class SpectralRule(HybridBlock): def __init__(self, A, in_units, out_units, activation, **kwargs): super().__init__(**kwargs) I = nd.eye(*A.shape) A_hat = A.copy() + I D = nd.sum(A_hat, axis=0) D_inv = D**-0.5 D_inv = nd.diag(D_inv) A_hat = D_inv * A_hat * D_inv self.in_units, self.out_units = in_units, out_units with self.name_scope(): self.A_hat = self.params.get_constant('A_hat', A_hat) self.W = self.params.get( 'W', shape=(self.in_units, self.out_units) ) if activation == 'ident': self.activation = lambda X: X else: self.activation = Activation(activation) def hybrid_forward(self, F, X, A_hat, W): aggregate = F.dot(A_hat, X) propagate = self.activation( F.dot(aggregate, W)) return propagate

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
建立GCN
根据上面的代码,可以实现Spectral 规则,我们将这些层叠在一起。使用一个两层架构,其中第一个隐藏层有4个单元,第二个隐藏层有两个单元。这种架构可以轻松地显示最终的二维嵌入。有三个值得注意的地方:
- 我们使用的是Spectral 规则;
- 激活函数:第一层使用tanh 激活函数,不然的话,死亡神经元的概率很高;第二层使用identity 激活函数,因为最后一层我们要分类节点。
最后,我们在GCN顶部加上逻辑回归层进行节点分类。上述体系结构的python实现如下:
def build_model(A, X):
model = HybridSequential()
with model.name_scope():
features = build_features(A, X)
model.add(features)
classifier = LogisticRegressor()
model.add(classifier)
model.initialize(Uniform(1))
return model, features
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
训练GCN
代码如下:
def train(model, features, X, X_train, y_train, epochs): cross_entropy = SigmoidBinaryCrossEntropyLoss(from_sigmoid=True) trainer = Trainer( model.collect_params(), 'sgd', {'learning_rate': 0.001, 'momentum': 1}) feature_representations = [features(X).asnumpy()] for e in range(1, epochs + 1): for i, x in enumerate(X_train): y = array(y_train)[i] with autograd.record(): pred = model(X)[x] # Get prediction for sample x loss = cross_entropy(pred, y) loss.backward() trainer.step(1) feature_representations.append(features(X).asnumpy()) return feature_representations
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
值得注意的是,图中节点只有管理员和教练才打了标签,其余的节点没有。GCN可以找到标记的节点和没有标记的节点表示,并在训练中利用这两种信息来进行半监督学习。具体地,在半监督学习中,GCN通过聚合节点的标签和节点未标记的邻居来产生节点的特征表示。训练过程中,我们反向传播二进制交叉熵损失,以更新所有节点之间的共享权重。而这种损失取决于标记节点的特征表示,而该特征表示又取决于有标签的节点和未标记的节点。
可视化特征 个人觉得此部分讨论讲解较为清楚
正如上面所说,每个时间的特征表示被存储,我们可以看到特征表示在训练期间如何变化。我考虑了两种输入特征表示。
表示一
在第一种表示中,我们简单地使用稀疏34 x 34单位矩阵I,作为特征矩阵X,即one-hot encoding图中的每个节点。这样表示的好处是,可以适用于任何图,但网络中的每个节点都需要输入参数,这需要大量内存和计算能力来训练,并且可能过拟合。幸好空手道俱乐部的网络很小。
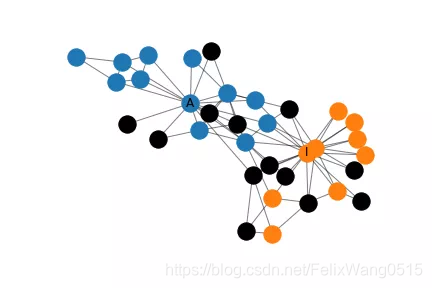
通过对网络中的所有节点进行集体分类,我们得到了网络中错误的分布情况,如上所示。这里,黑色表示错误分类。尽管将近一半( 41 % )的节点被错误分类,但与管理员或教练(但不是两者)密切相关的节点倾向于正确分类。
上面我已经说明训练过程中特征表示是如何变化的。最初,节点是密集的聚集在一起,随着训练,教练和管理员被拉开,同时它们拖动一些节点。
虽然教练和管理员的表示不同,但是它们拖动的节点并不一定完全属于它们的社区。
这是因为图卷积嵌入了在特征空间中共享邻居的节点,但是共享邻居的两个节点可能并不等同的连接到管理员和教练。特别是,使用对角矩阵作为特征矩阵导致每个节点高度局部的表示,也就是说在图中相同区域的节点可能紧密嵌入在一起。这使得网络很难以归纳的方式在全局上共享知识。
表示二
我们将改进表示1,改进的方法是增加两个特征,这两个特征不具体到任何一个节点或者网络中的区域,是衡量教练和管理员的连通性。为此,我们计算了网络中每个节点到管理员和教练的最短路径,并将这两个特征连接到前面的表示中。
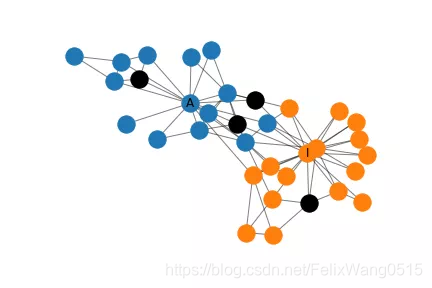
如前面所述,我们对网络中的所有节点进行了总体分类,并绘制了上图。表示2只有4个节点被错误分类,与表示1相比有了很大的提高。仔细检查特征矩阵后,原因可能是因为这些节点在最短路径上的距离更靠近教练,但它实际上属于管理员社区。
如上所示,节点最初是紧密的聚集在一起,但是在训练开始之前,它在某种程度上已经分成了两个社区,随着训练过程,社区之间的距离增大。

