
- 1王道数据结构——线性表和单链表操作_王道数据结构相线性表和链表
- 2使用Flink实现MySQL到Kafka的数据流转换_flink 消费mysql到kafka
- 3天池NLP新闻文本分类学习赛心得-Task2_新闻文本分类项目难吗
- 4专访微软战略安全官裔云天:做好网站安全的纵深防御
- 5Nat. Rev. Genet. | 通过可解释人工智能从深度学习中获得遗传学见解
- 62024年最新猿创征文|我的技术成长之路&;&;C++_c++抽奖程序,2024年最新从零开始学大数据开发编程
- 72024简约唯美的个人引导页源码
- 8Hadoop伪分布式集群搭建_在sbin目录中vim start-dfs.sh
- 9软件测试中年危机?30岁大关?“我“该如何破局...
- 10机器学习-KNN最近邻算法原理及实践_knn算法实验原理
Ubuntu20.04安装到U盘里(以及ros环境的搭建)_u盘安装ubuntu
赞
踩
2024.5.27更新
一,进入
查找网络上安装系统到u盘中都为Ubuntu18.04,有20.04的需要VIP,所以自己摸索,最后成功安装,所以分享出来将Ubuntu20.04安装到U盘上的经验。有错误请指正~
由于比赛的要求,需要Ubuntu20.04环境配置,虚拟机安装Ubuntu会卡,双系统安装我害怕把原windows系统搞坏掉,因此,我选择了u盘作为系统盘安装Ubuntu系统,网上有许多种方法来进行u盘安装,我这里讲的是两个u盘安装。
目录
1.安装前的准备
1.1 u盘的选择
安装需要两个U盘,一个为普通U盘(作为启动盘),8GB以上即可,另一个为高速U盘,最好为协议为usb3.0以上,64GB以上,否则进入Ubuntu会非常缓慢。
1.2 下载Ubuntu20.04的镜像
Index of /ubuntu-releases/20.04/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
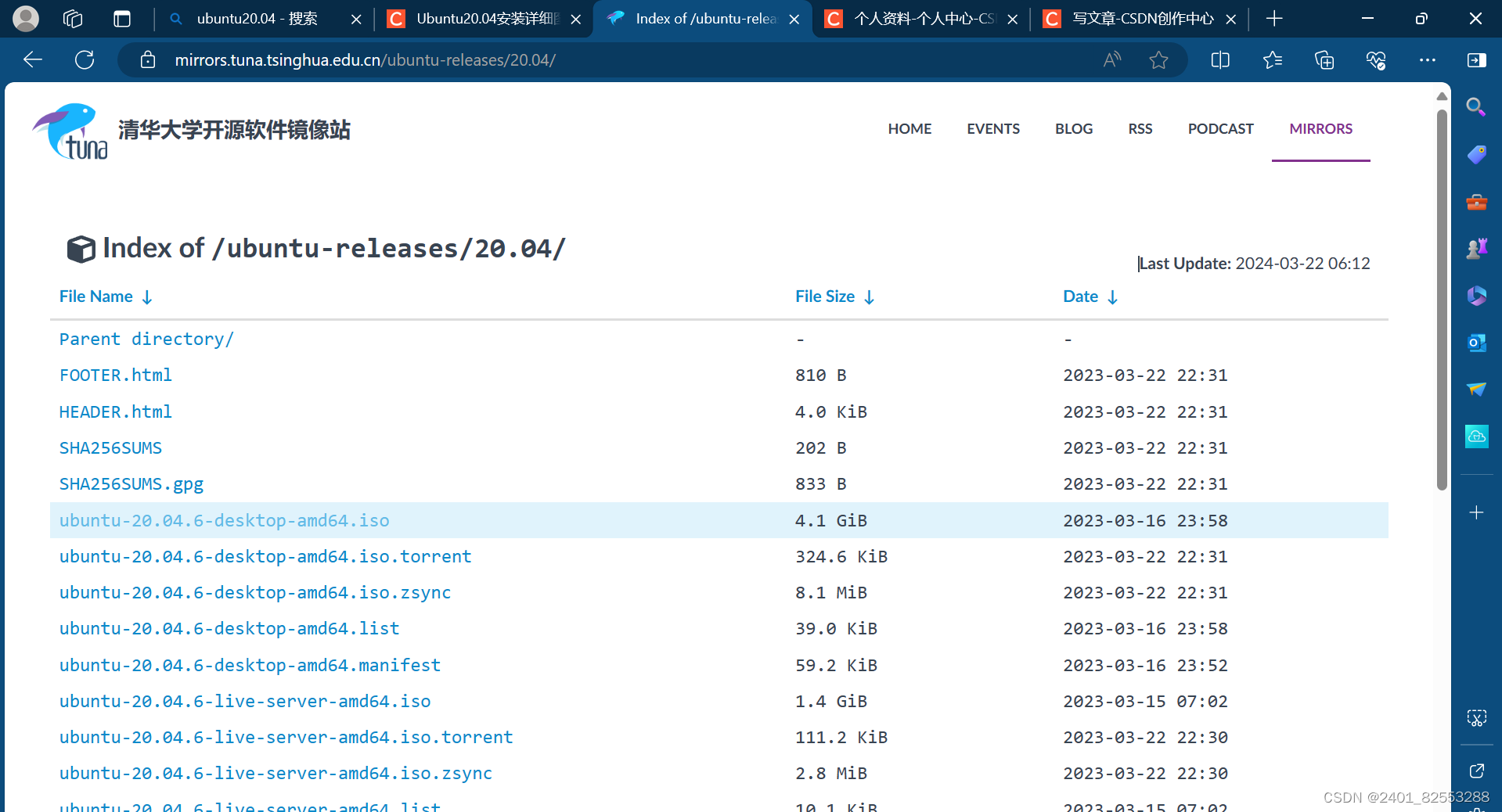
选择颜色加深的版本下载。
1.3 制作启动盘
准备一个8GB以上的普通U盘(将Ubuntu20.04镜像文件烧录进去)具体过程如下:
网站:Rufus - 轻松创建 USB 启动盘(可能需要科学上网,否则下的很慢)
无需安装,打开后有.exe文件,打开后如下图:
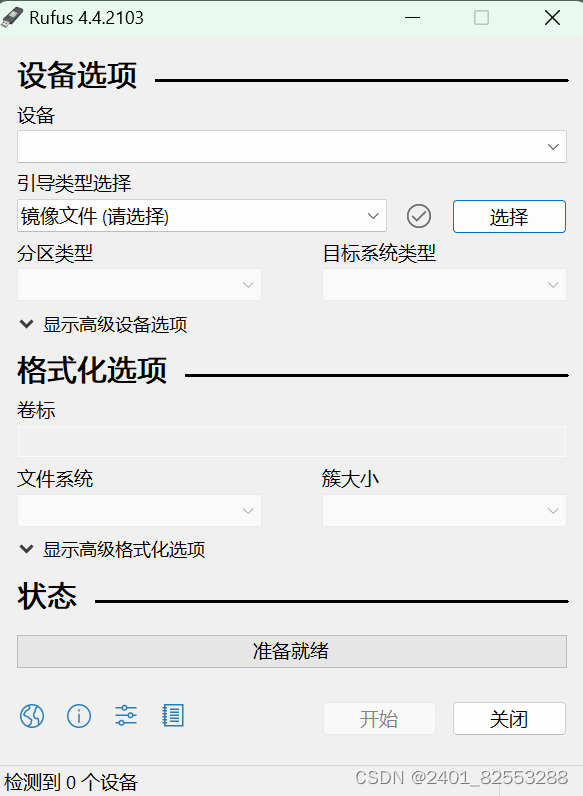
插入普通U盘,设备选择你的U盘;
点击右侧选择将下载的Ubuntu20.04的镜像导入;
其他的默认,最后点击开始,一路确认即可。
制作好u盘显示为:
1.4 设置电脑U盘启动优先
设置电脑为u盘启动优先,需要进入电脑的bios。不同的电脑进入bios的方法不同,可自行搜索。设置好后,保存设置。
2. Ubuntu20.04的安装(核心)
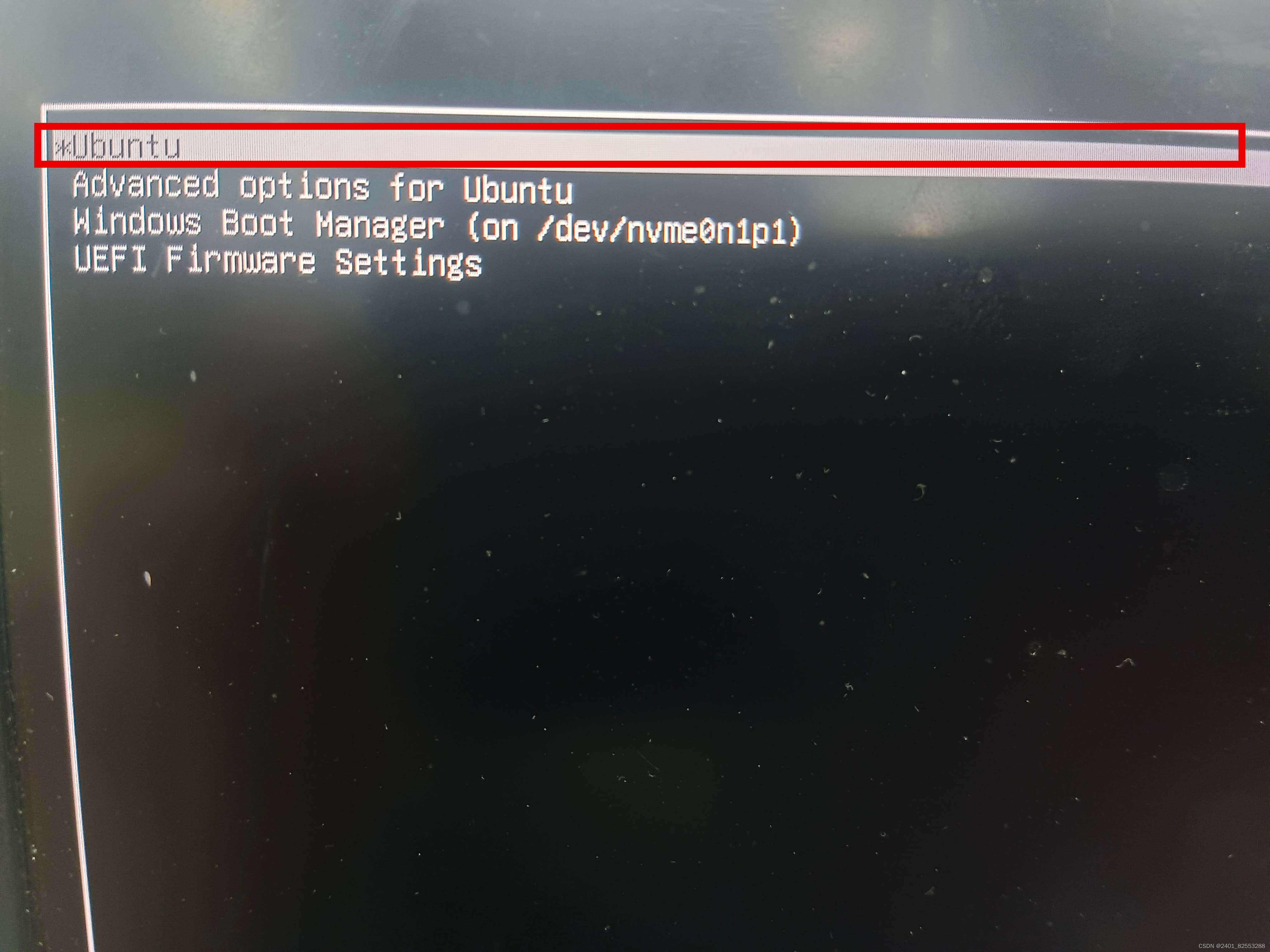
2.1 启动盘插入,开始安装
插入制作好的启动盘插入,启动电脑进入bios,选择U盘启动,如图,选择第一个(红框圈住的位置,回车即可)。
2.2 插入高速u盘
进入后,等待加载,如图:
然后显示如下图,选择直接安装(install ubuntu)
可以选择中文或者英文,这里我选择的英文。
连接网络

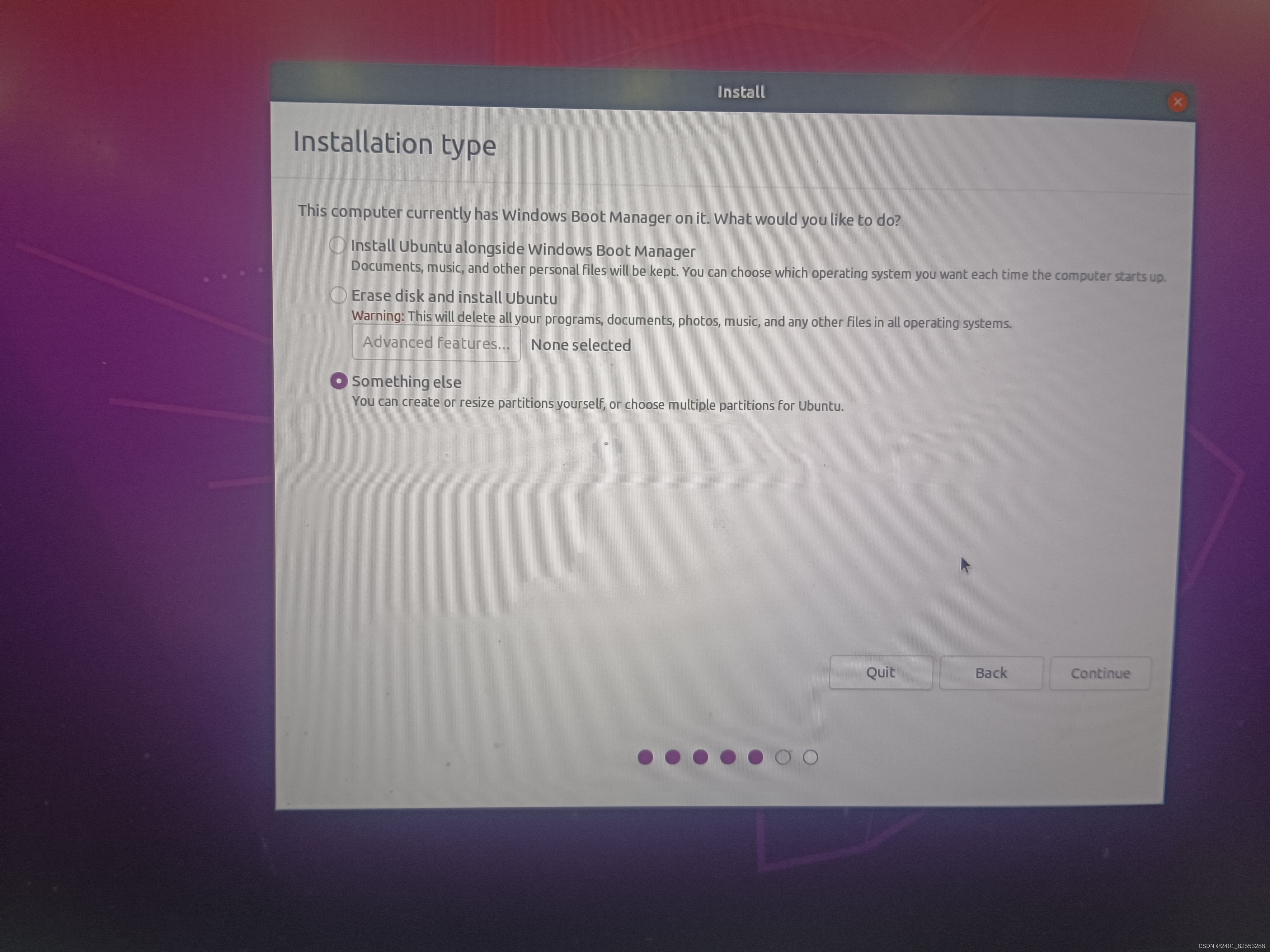
这里可以选择其他的,我选择的正常安装
这时选择其他选项(something else)
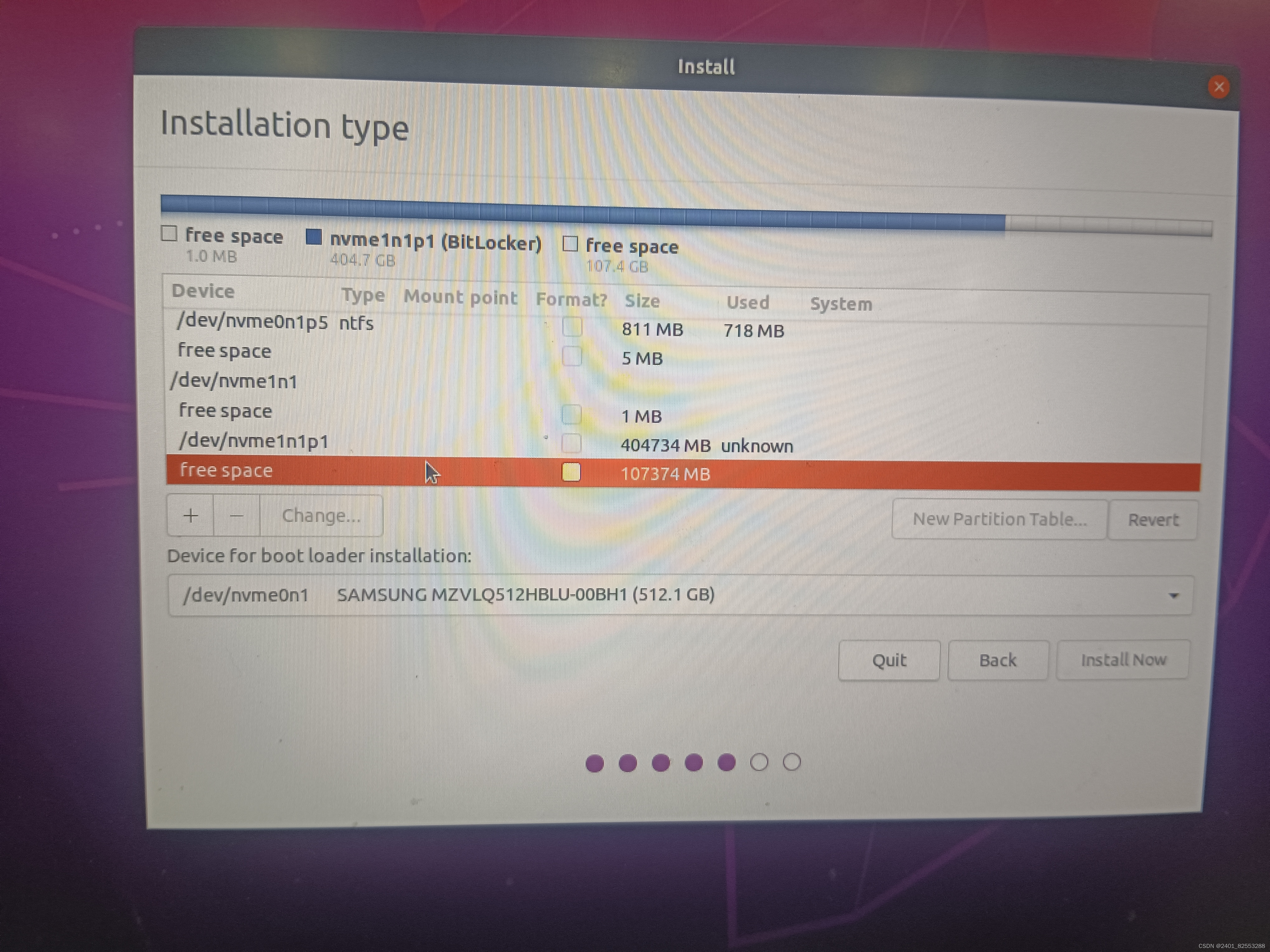
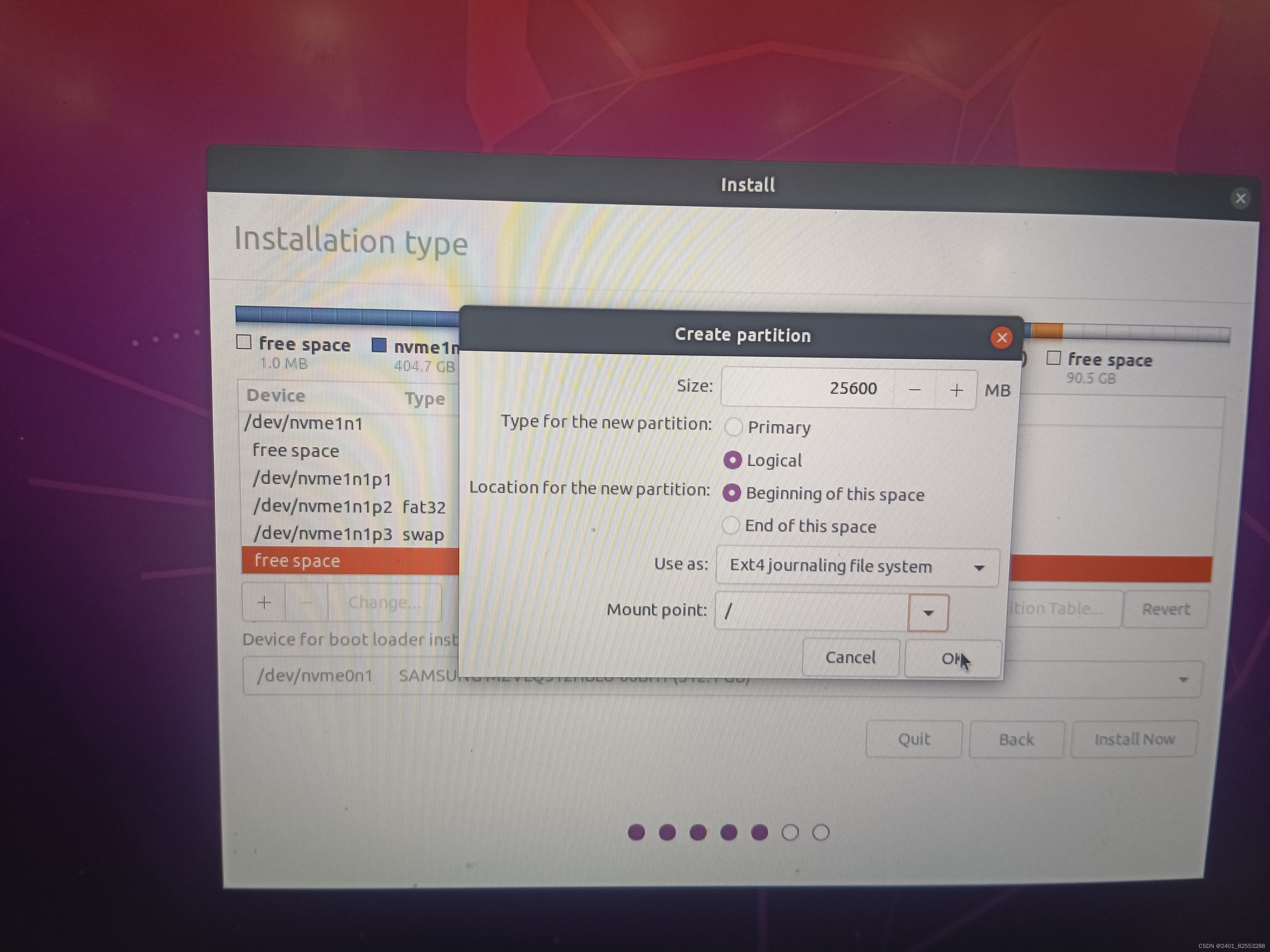
3. 最重要的一步(分区)
第一步:选择你的高速优盘,将其选中,然后按“-”将它的空间变为可用空间,然后点击“+”,创建分区
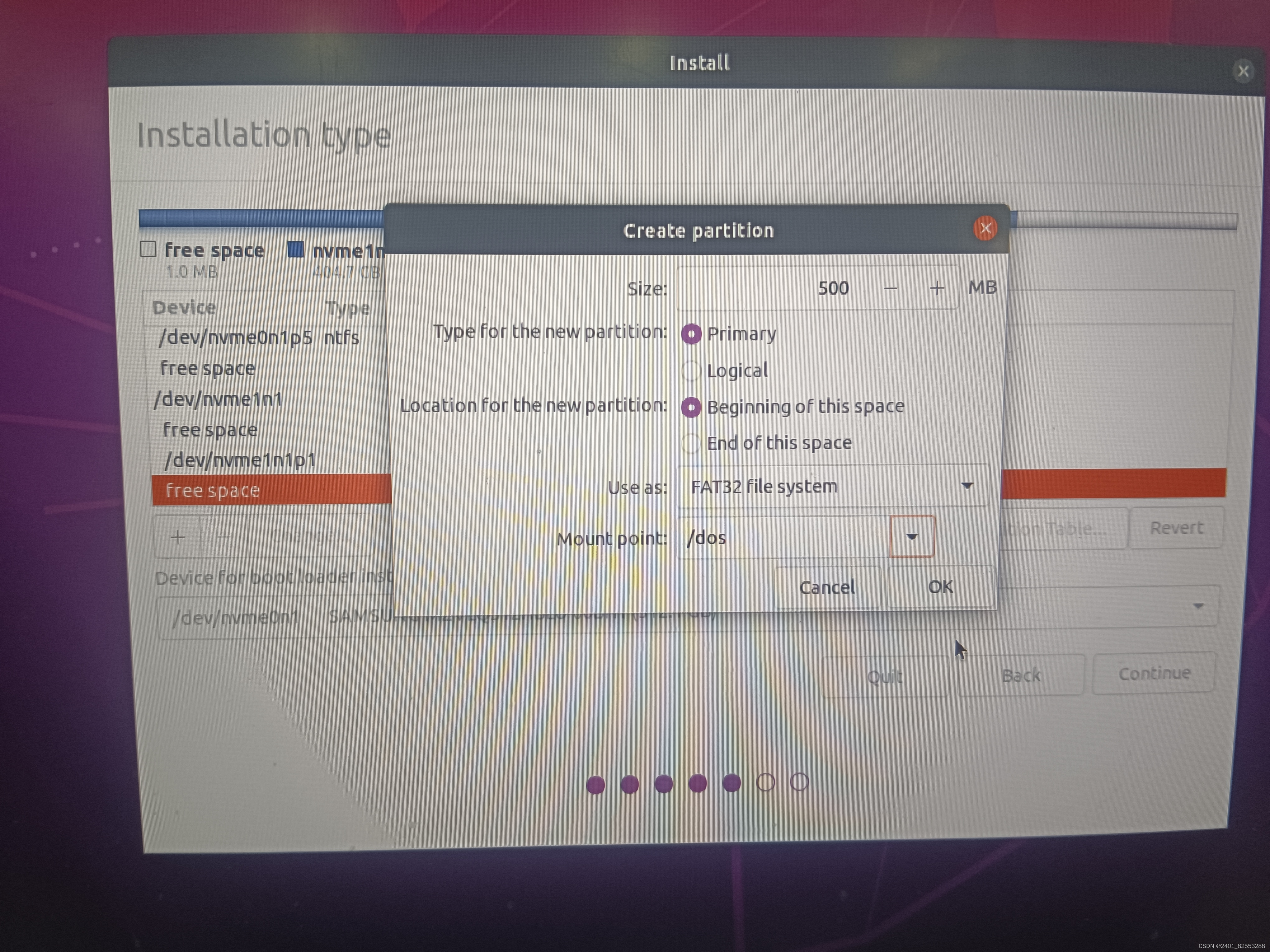
3.1 创建fat32分区
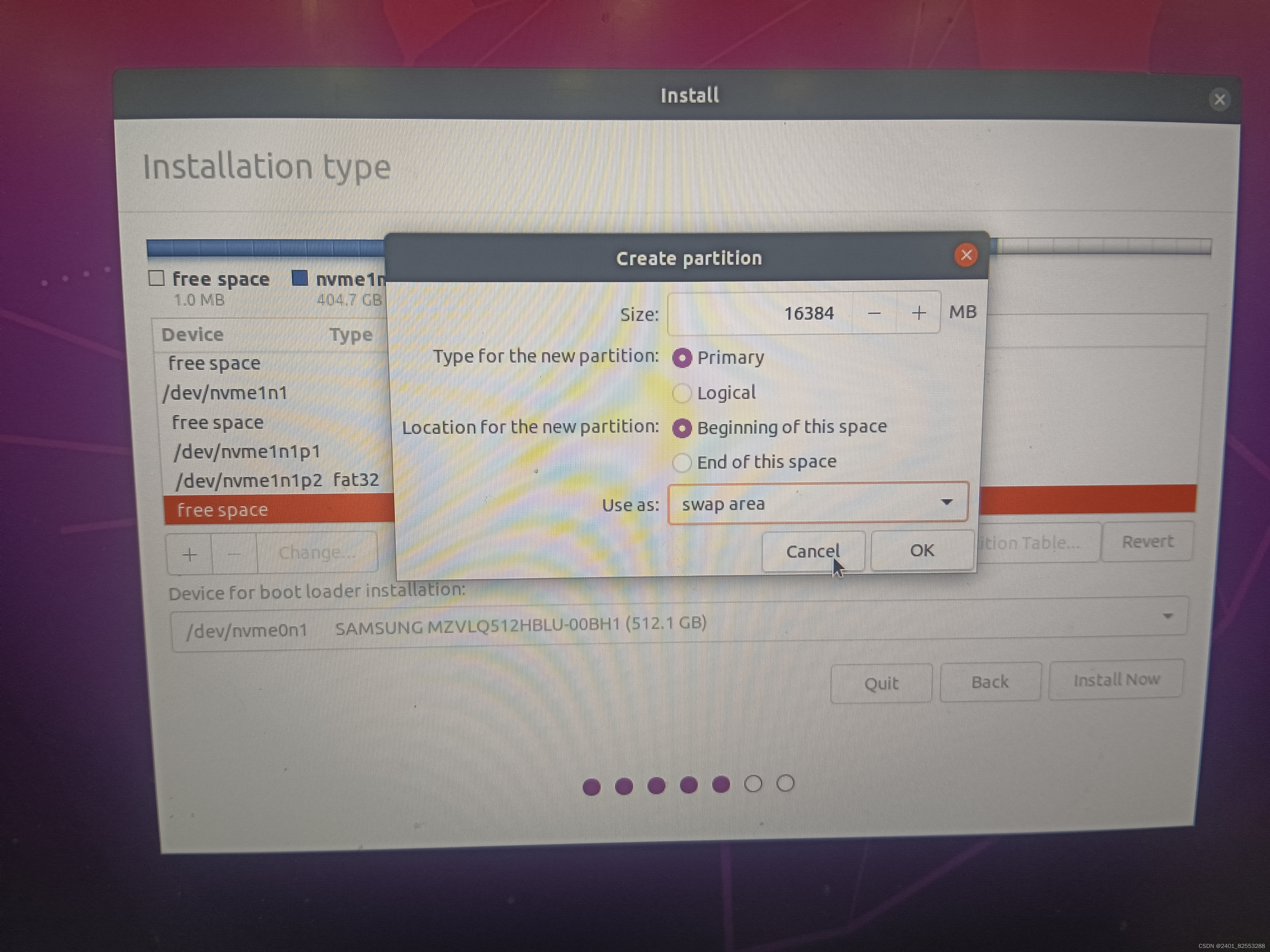
3.2 创建swap交换
3.3 创建/根目录
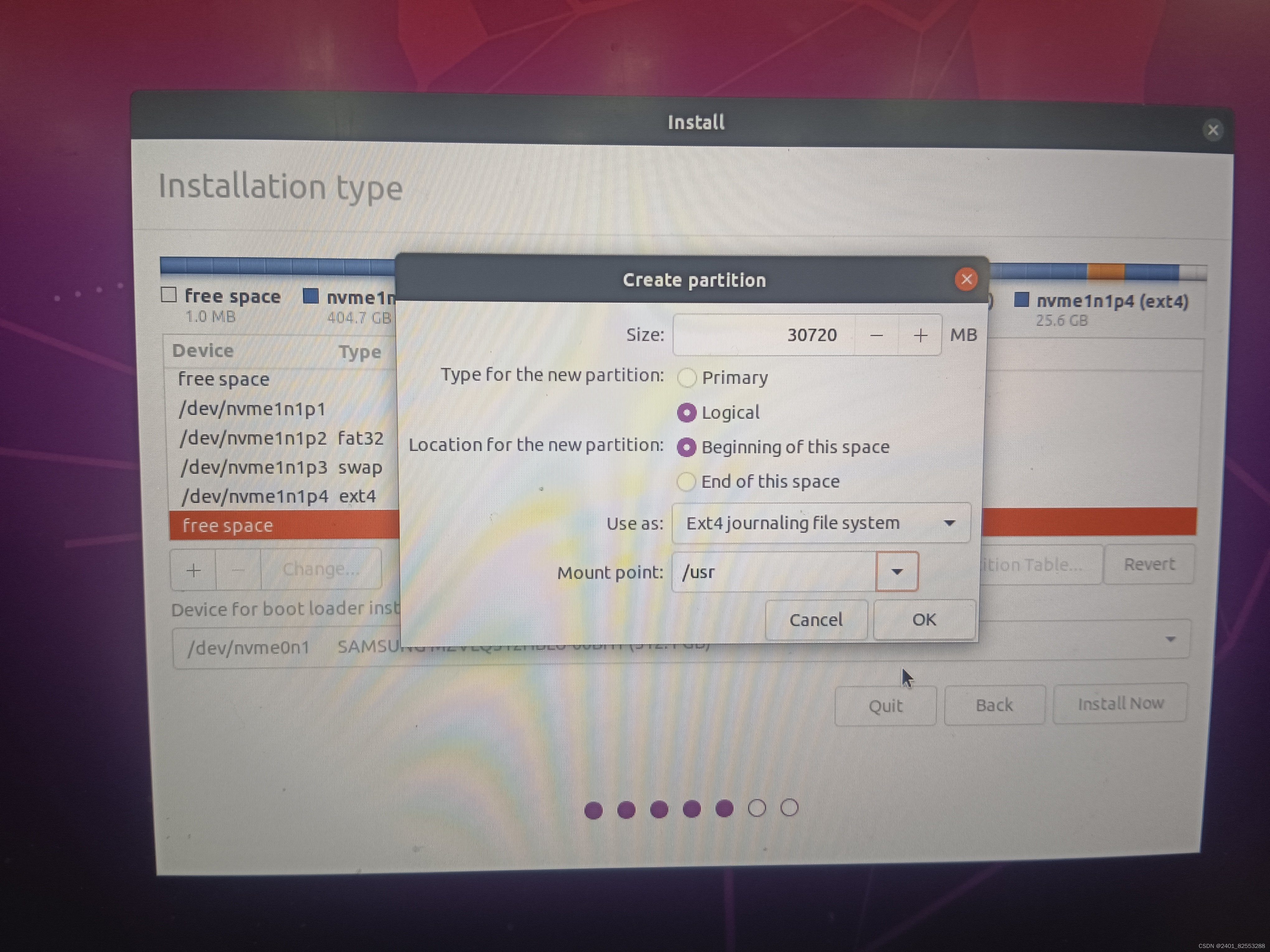
3.4 创建/user目录
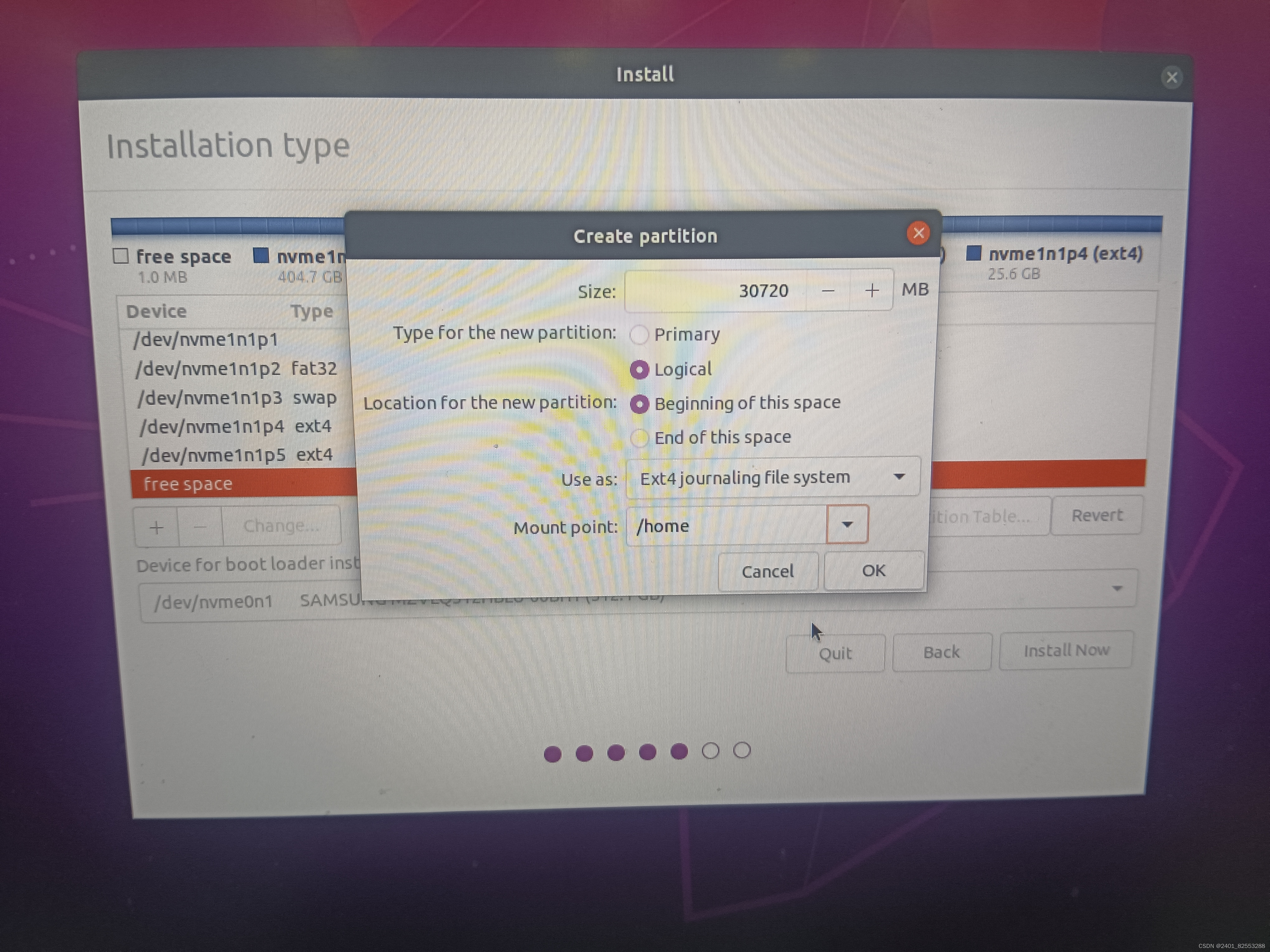
3.5. 创建/home目录
切记,这个Device for boot loader installation一定要选择你的U盘,否则会损坏你的Windows系统。
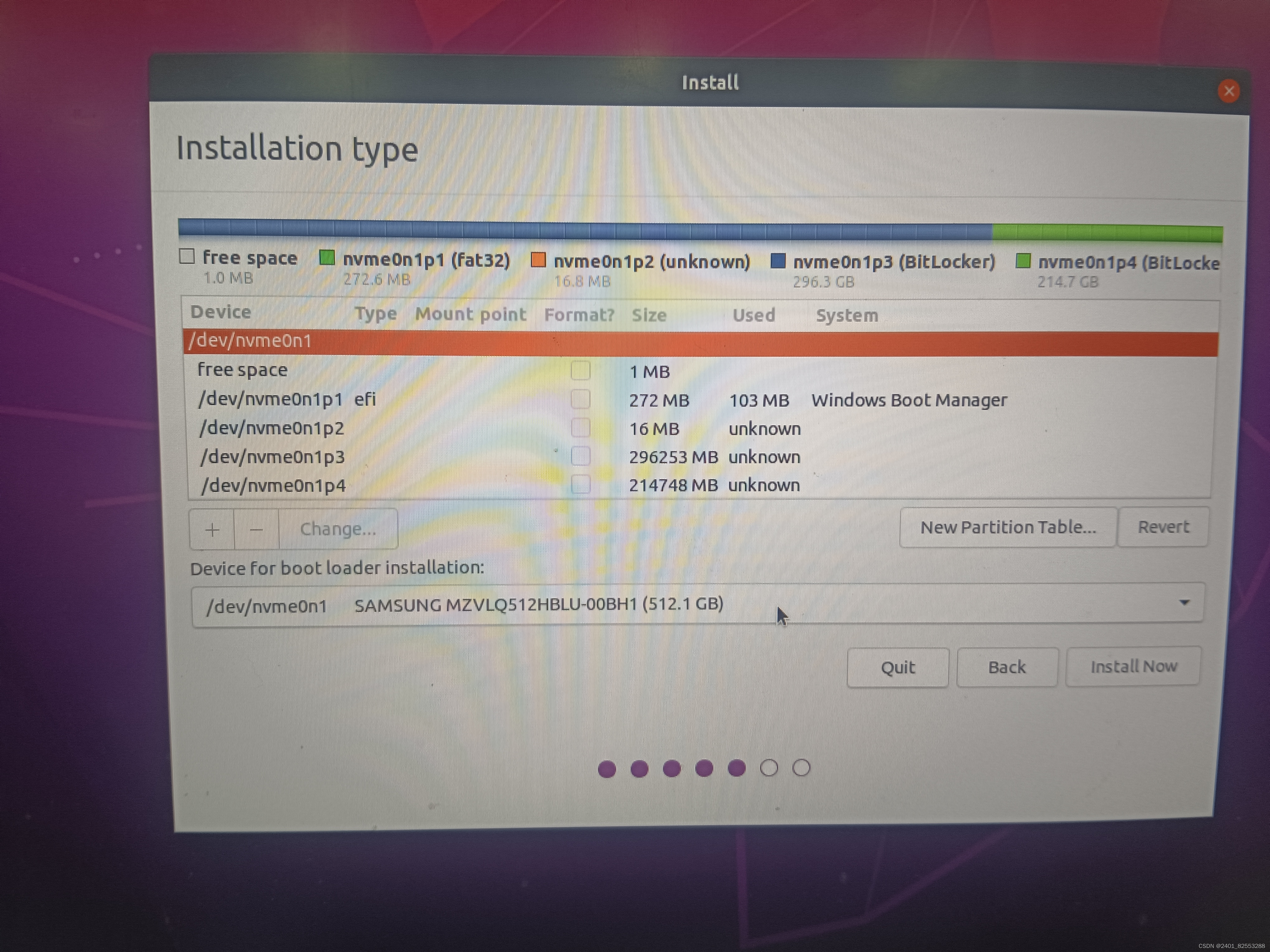
安装好后,如下图所示:
接下来就可以开心的使用Ubuntu系统了!!!
3.6 注
每次启动Ubuntu时,要进入电脑引导,选择Ubuntu启动。
退出ubuntu步骤是先关机,再拔下u盘。
有时启动Ubuntu后返回Windows系统,时间会发生错误,具体修改参考一招彻底解决——双系统下windows时间错误显示_winserver2008无法获取ubuntu时间-CSDN博客
4. 安装ros
4.1 配置Linux镜像源
- 清华源:https://mirrors.tuna.tsinghua.edu.cn/
- 阿里云:https://mirrors.aliyun.com
- 中科大:https://mirrors.ustc.edu.cn
4.1.1 开始配置
以清华大学镜像源为例:
点击 “ ?”显示如下

选择对应的版本,框中的代码。
打开Ubuntu的终端,依次输入以下代码,输入一行,然后回车。
sudo apt update# 将 sources.list 拷贝到桌面
cp /etc/apt/sources.list ~/Desktop
# 打开 sources.list 进行编辑
sudo gedit /etc/apt/sources.list
打开文件后,将里面的所有内容替换为之前网页内文本框里的内容
然后保存关闭即可。
4.2 开始安装
配置公钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654更新系统到最新
sudo apt-get update安装ros,我安装的是20.04的ros版本,不同ubuntu版本不同,对应安装也不同。
sudo apt install ros-noetic-desktop-full4.3 配置ROS
初始化rosdeb
- sudo rosdep init
-
更新rosdeb安装出错,(如果安装出问题,见 5.注)
sudo rosdep update
环境变量设置,直接复制即可。
- echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
- source ~/.bashrc
安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
以上,ros便安装好了。
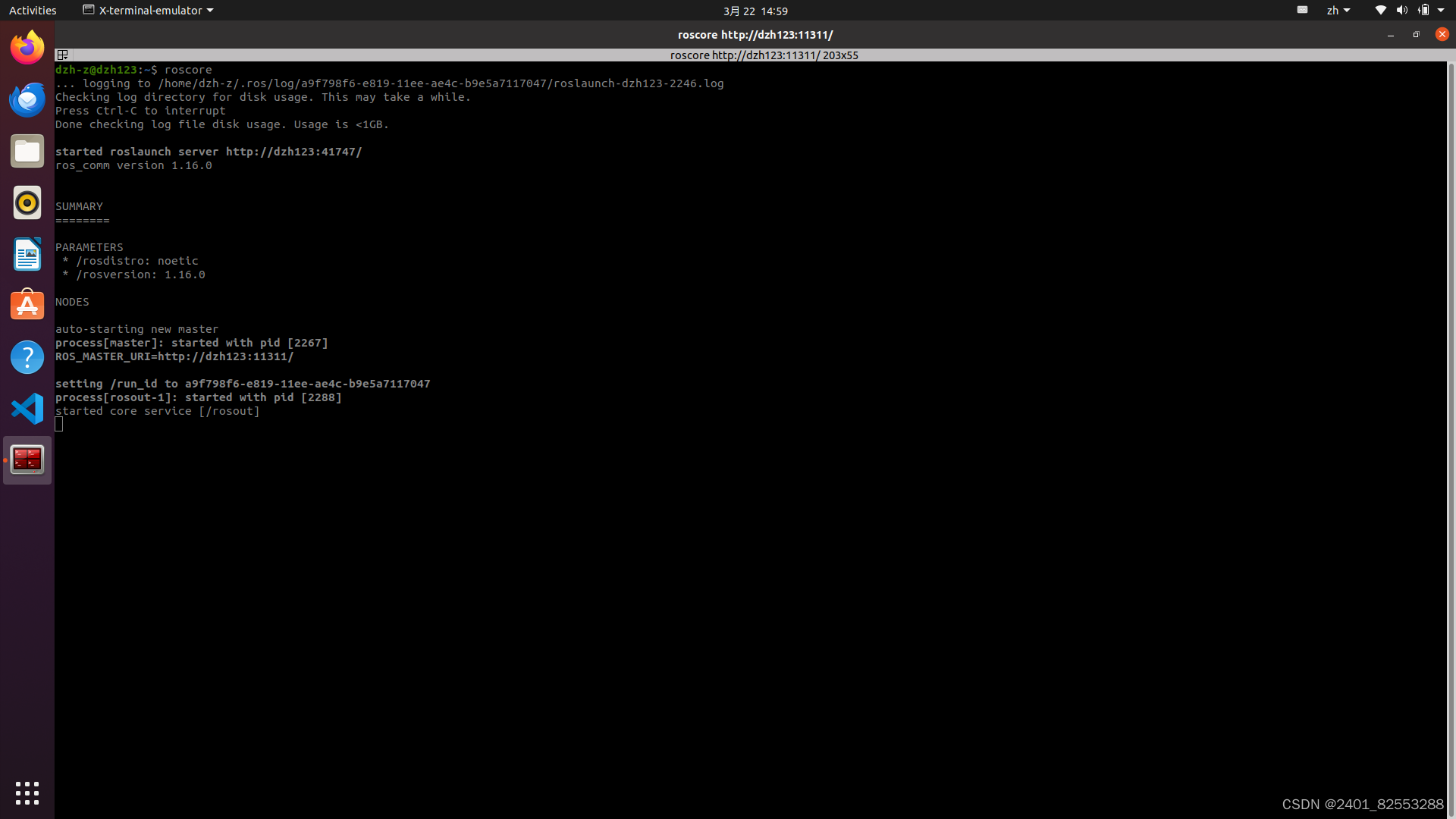
4.4 测试ros是否安装成功
打开终端,运行roscore。
roscore如下图:
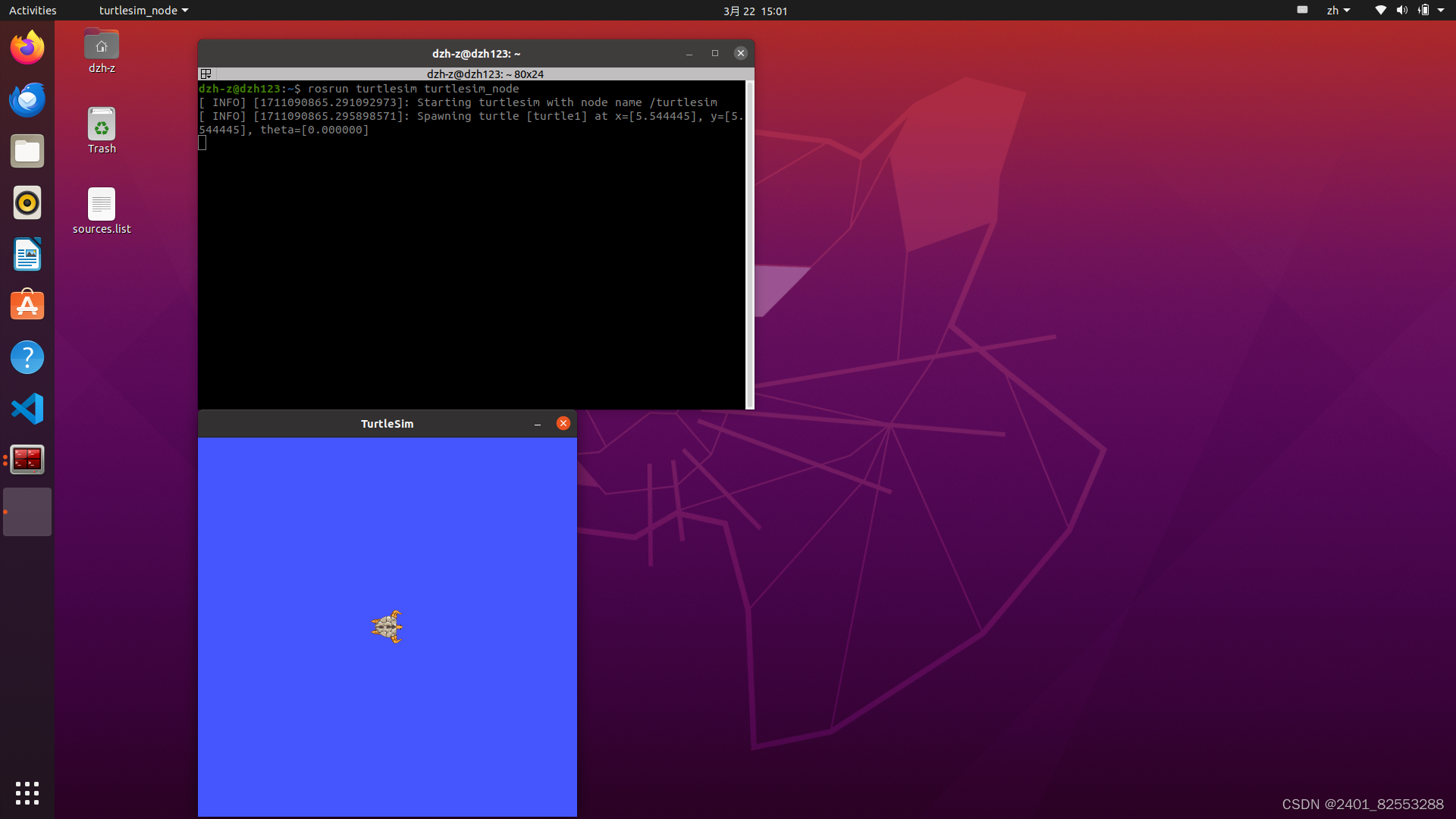
新打开一个终端出,运行turtlesim节点。
rosrun turtlesim turtlesim_node出现如下图,即成功:
再打开一个终端,启动控制
rosrun turtlesim turtle_teleop_key 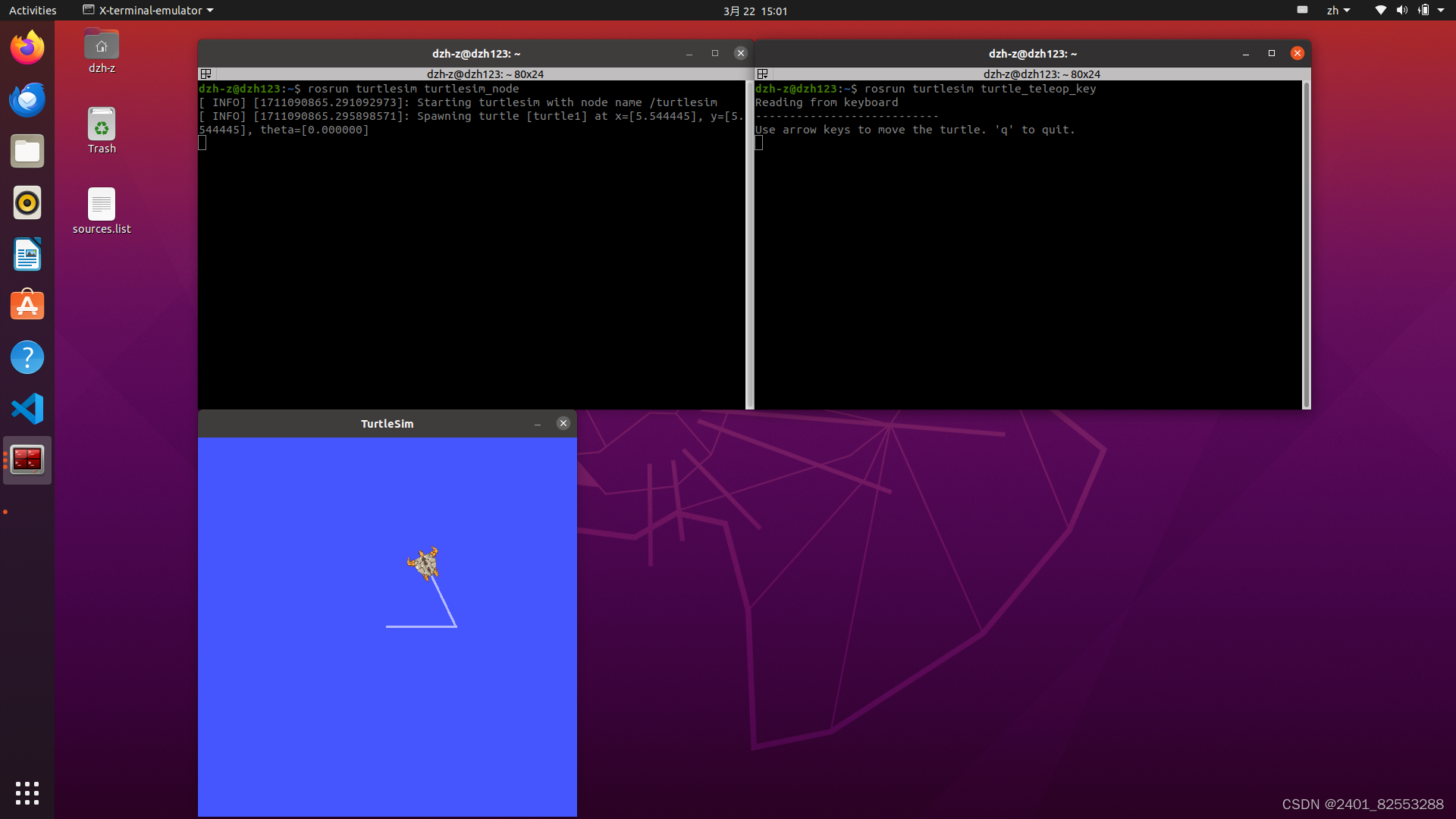
在当前终端,可以使用↑,↓,←,→来控制乌龟运动。
4.4 恭喜你,安装完成
现在你完成了ros的安装,祝你学习ros顺利。
5. 注:
最简单的解决方法是参考鱼香ros大神为我们国内用户写的rosdep,可以参考知乎文章:本文之后,世上再无rosdep更新失败问题!如果有....小鱼就... - 知乎
参考:
【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程_ubuntu20.04安装ros-CSDN博客
制作随身携带的Ubuntu系统——Ubuntu2Go_ros2go-CSDN博客
Ubuntu 20.04 系统分区_ubuntu分区-CSDN博客
【ROS】在 Ubuntu 20.04 安装 ROS 的详细教程_ubuntu20.04安装ros-CSDN博客

