
- 1生成式人工智能如何改变商业和社会
- 2荣誉!InterSystems被独立研究机构Forrester评为“事务分析型数据平台领导者”
- 3华为OD 机试真题 - 分割均衡字符串(Python)
- 42024年测试UDP端口连通性_udp端口测试(2),软件测试多线程实现方式及并发与同步_udp端口怎么测连通性
- 5【Postman】使用教程(超详细)_postman 登录
- 6学生信息管理系统——JAVA_java学生信息管理系统
- 7HarmonyOS应用开发高级认证_harmonyos应用开发者高级认证考试最新题库及答案
- 8机器人相关知识_机器人关节力矩 电机力矩
- 9Flink与Kafka集成:跨版本兼容性与性能优化实战_flink1.18.1u与kafka哪个版本
- 10Encoder-Decoder架构
机器人训练环境isaac gym以及legged_gym项目的配置问题_leggym
赞
踩
isaac gym是现阶段主流的机器人训练环境之一,而“https://leggedrobotics.github.io/legged_gym/”(下称legged_gym)则是入门isaac gym机器人训练的经典开源项目,博主在这里记录实现legged_gym项目过程中的部分环境配置过程:
1.基本环境配置
首先在ubuntu系统中创建新的虚拟环境,python版本为3.8:
conda create -n leggym python=3.8进入虚拟环境:
conda activate leggym按照legged_gym上教程文档,安装pytorch 1.10 和对应版本的 cuda-11.3:
pip3 install torch==1.10.0+cu113 torchvision==0.11.1+cu113 torchaudio==0.10.0+cu113 -f https://download.pytorch.org/whl/cu113/torch_stable.html进入isaac gym 官网:Isaac Gym - Preview Release | NVIDIA Developer
下载Isaac Gym Preview 4(readme教程上写的是3,但是4向下兼容)。
下载Isaac Gym解压之后,到isaacgym/python目录下(有set up.py的那个目录),命令行中输入:

pip install -e .验证是否成功安装isaacgym,去examples目录下运行:
python 1080_balls_of_solitude.py成功运行:

安装PPO算法部署需要的rsl_rl,先附上其下载地址:https://github.com/leggedrobotics/rsl_rl
进入该位置:
输入:
pip install -e .注意:rsl_rl需要下载此前的1.02版本,下载默认版本(新版本)会报错。

再回到 legged_gym目录下,到有setup.py文件的位置,再次输入
pip install -e .完成配置。
由于版本更新,还需要修改两个包的版本,添加一个包才能正常运行,否则会报错,博主在这里直接给出代码:
- pip install numpy==1.23.5
- pip install tensorboard
- conda install setuptools==59.5.0
经热心网友提醒,现在 setuptools==59.5.0 版本可能不兼任,更改为安装:
conda install setuptools==58.0.42:leggym训练与实现:
配置好后,到此位置:

进行训练:
python train.py --task=anymal_c_flat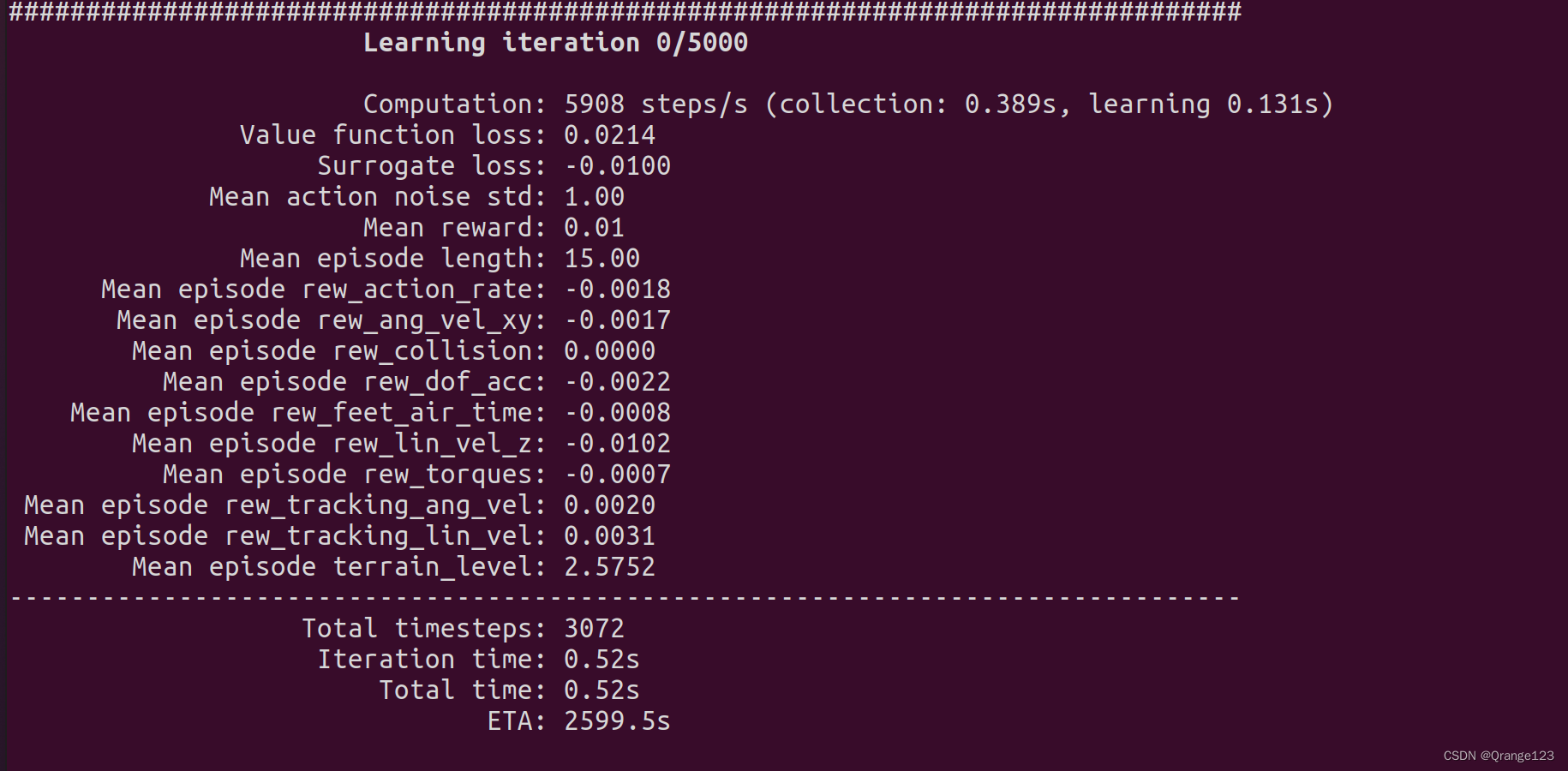
最后测试训练结果:
python play.py --task=anymal_c_flat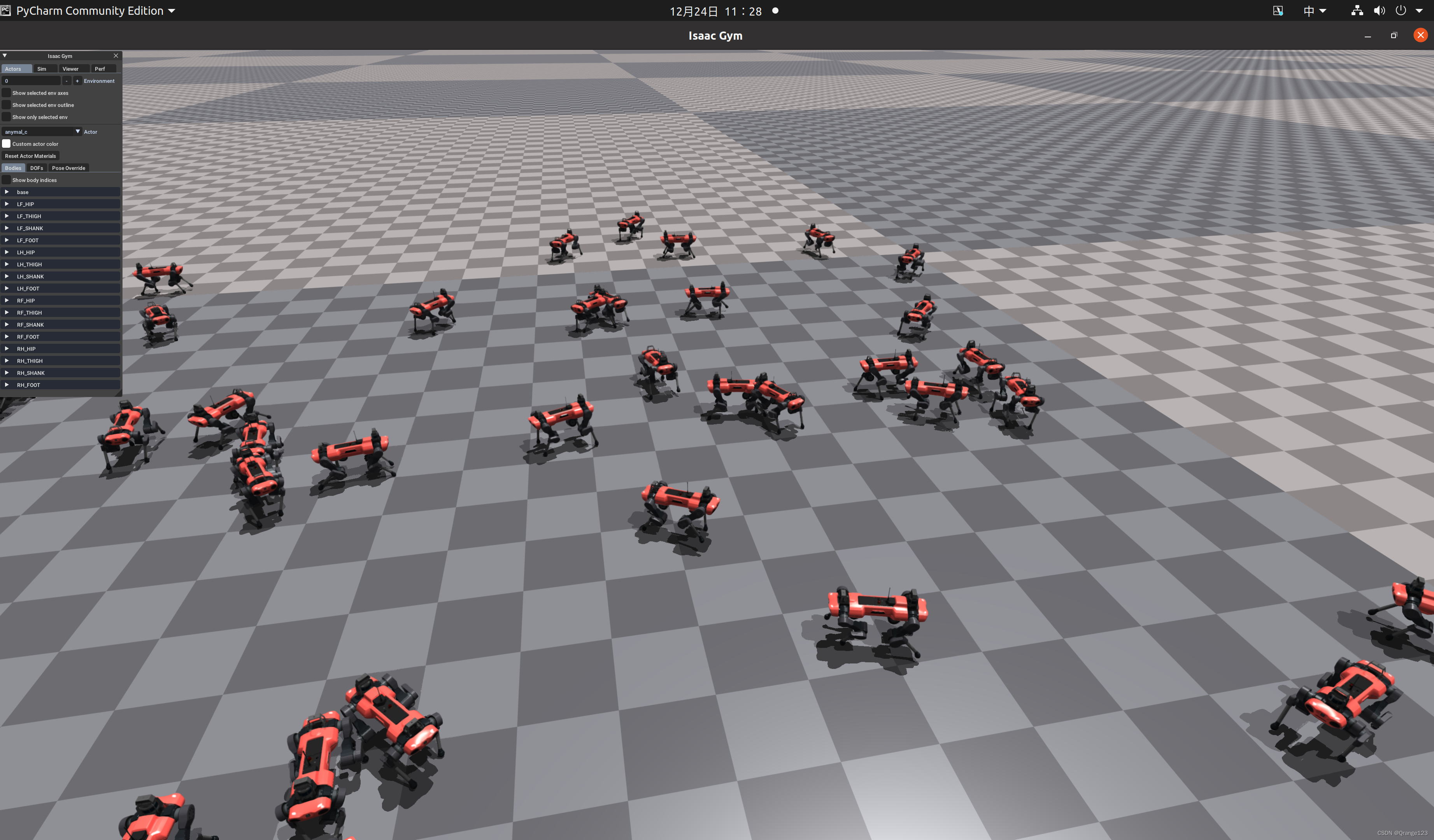
Tips:如果显存不足报错,可以修改envs的数量(在config.py文件中);添加headless(训练时不显示图形框)在一定程度上缓解;另外建议使用nvidia-smi命令查看显存占用情况。

