
- 1设置hive的执行引擎_0506如何将Hue4.0版本中默认执行引擎设置为Hive而非Impala
- 2高校导师在微信群里公然委托关照考研复试,学校通报处理情况!
- 3腾讯AniPortrait开源:音频合成逼真人脸动画,对标阿里EMO_腾讯aniportrait 模型下载
- 4stable diffusion常用的模型_stable diffusion 常用模型
- 5基于Kafka+Flink+Redis的电商大屏实时计算案例
- 6前端自动化测试(二)Vue Test Utils + Jest_vue+jest 测试api
- 7【前端】从零开始学习编写HTML
- 820240624 每日AI必读资讯
- 9数据结构之冒泡排序图文详解及代码(C++实现)_c++冒泡算法代码
- 10Dagger2 在 Android SystemUI 中的应用_android systemui11 dagger2
PX4-入门基础篇
赞
踩
前言
设计无人机的飞控是一个非常复杂的工程,想靠一个人或者小的团队设计出稳定成熟的飞控,难度是非常大的,因此对于很多做无人机的同学来说,使用开源飞控更加方便高效.笔者对开源飞控PX4有过一定研究,也走了很多弯路,遇到不少问题.特此将一些相关的经验记录下来,希望能给其他同学一些帮助或参考.
一、PX4是什么?
PX4是由苏黎世联邦理工学院的计算机视觉与几何实验室的一个软硬件项目PIXHAWK演变而来,有"开源飞控之王"之称,目的在于为学术、爱好和工业团体提供一款低成本高性能的高端的自驾仪,PX4是专业的自动驾驶仪。它由来自工业界和学术界的世界级开发人员开发,并得到活跃的全球社区的支持,为各种载具提供支持。
PX4目前由Dronecode基金会进行支持和运行,遵循BSD协议,该协议允许将开源软件二次开发后用作商业用途。目前广泛应用于视觉导航、视觉避障、多机协同、目标跟踪等用途.、
二、PX4的接口定义

这张图可以很清楚的看到关于px4的一些接口。首先小编介绍一下比较常用的一些接口:POWER1,GPS1,TELEM1,TELEM2,PPW/SBUS,I/O PWM OUT。
三、接线图概括:

四、电源
使用6PIN线材将套件中附带的 电源管理板 (pm板) 的输出连接到 Pixhawk 4 的其中一个 POWER 端口。
电源管理板的 2~12S 输入将连接到您的锂电池。
POWER1作为一个电压输入口,电压不宜过大,所以我将会用到电流计,保证输出给飞控的电压不高于5V。
五、飞控、GPS的安装和方向
减震泡沫垫,尽量接近飞机的中心位置,正面朝上,飞机箭头与飞机机头一致超前。有条件的同学可以在飞控下面加一层减震的减震板。
飞控上有三个不同颜色的指示灯,可以通过指示灯的颜色和频率来判断存在的问题:
1)指示灯的含义
红灯和蓝灯闪:初始化中,请稍等。
黄灯双闪:错误,系统拒绝解锁。
蓝灯闪:已加锁,GPS搜索中。自动导航,悬停,还有返回出发点模式需要GPS锁定。
绿灯闪:已加锁,GPS锁定已获得,准备解锁;从加锁状态解锁时,会有快速的两次响声提示。
绿灯长亮加单次长响:GPS锁定并且解锁。 准备起飞
黄灯闪:遥控故障保护被激活。
黄灯闪加快速重复响:电池故障保护被激活。
黄灯蓝灯闪加高-高-高-低响:GPS数据异常或者GPS故障保护被激活。
2)安全开关指示灯的含义
快速、持续闪烁:执行系统自检中,请稍等。
间歇闪烁: 系统就绪,请按安全开关按钮以激活系统。
常亮:已经准备好解锁,可以执行解锁程序。
3)蜂鸣器和指示灯的状态列表
初始化 红蓝色闪光
未解锁时,GPS未锁定,蓝色闪光,一长声解锁音
未解锁时,GPS锁定,绿色LED闪亮,两短音
解锁时,GPS锁定,绿色LED常亮,一长音
解锁失败,两低音
ESC校准,红绿蓝LED闪光
无线电故障,黄色LED闪亮
电池故障,黄色LED闪亮,急促短音
GPS故障,黄色和蓝色LED闪亮
EKF惯导失败,黄色和红色LED闪亮
气压计故障,黄色和紫色LED闪亮
未插内存卡,红色LED闪亮
GPS模块内集成的安全开关默认情况下 是启用的 (启用后, PX4不会让您解锁飞控)。 如需关闭安全开关,请按住安全开关1秒钟。 你可以在完成任务后再次按下安全开关以启用并锁定载具 (因为这是处于安全考虑的机制,无论出于何种原因,您将无法通过遥控器或地面站来远程解锁您的载具。)
六、数传电台(非必要)
遥测无线电台可用于地面站的通信和飞行控制 (例如, 您可以远程连接上位机修改参数, 或上传新的任务)。
机载端的无线数传模块应连接到 TELEM1 端口,如下所示(如果连接到此端口,需确定数传的的波特率并在上位机中修改为对应的波特率)。
也可用数据线来有线连接飞控和上位机(ps:选择传输速率快的type-c的线)
七、动力输出
让飞行器飞起来必不可少的东西除了电机就电调了,还句话来说就是一个功率很大的一个驱动。常见的有20A和40A的电调,电调的选择要根据你飞机的大小和载重来选择,一般40A的电调就足够满足绝大多数的要求了。
下图就是一个40A的电调:

首先看图左边的三根香蕉线,这是接入电机的输入线。由于没有正负极的概念,可以随便接!!!!!上电后发现转向和你想要的转向不一样的话,任意更改其中两根线的顺序即可!!!
电机的转向在我后面的文章有,大家不要着急!!!
图右的红黑两根线就是供电线,需要供给12~16V的电压,接反了可就真的寄了。紧接着的白黑两根杜邦线就是接入pwm输出口的,其中没有电源线,只有一根地线和信号线。
八、电机转向
介绍之前博主先把自己搭建的飞机给大家参考一下,便于讲解;


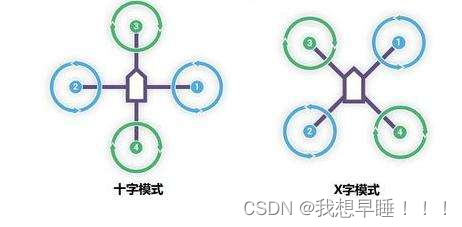
飞行器布局:
事实上,四轴飞行器还分两种布局,一种是 十字形布局,另外一种则是较为常见的 X型布局 ;
由于 X型布局 的应用更为广泛,这里我们就重点讲解 X型布局 的飞行原理;
常选用X字型
- 俯仰滚转 机动性更强(多旋翼飞行器向前飞和横向飞的概率远大于其他飞行方向)
[一般飞行先调整角度,再向前飞行]- 前视相机的 视场角 不容易被遮挡。
我们在确定电机的旋转方向时一定要把桨叶给取下,固定将桨叶的固定帽一定一定要和电机的方向相反以达到自锁的效果!!!!!!!!
与传统的直升机相比,四轴飞行器有下列优势:
各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当 电机1 和 电机2 逆时针旋转的同时,电机3 和 电机4 顺时针旋转,可以平衡旋翼对机身的反扭矩;四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现;
其基本运动状态分别为:
垂直运动;
俯仰运动;
滚转运动;
偏航运动;
前后运动;
侧向运动;


