
- 1Sublime Text 3配置 Java 开发环境_sublime java
- 2Ei期刊投稿要求
- 32023人工智能十大关键词“Agent”智能体,继ChatGPT后成最热AI焦点_智能体agent
- 4HM4052一款针对单节4.2锂电池带动态路径管理的开关型充电电路IC
- 5AI绘画Midjourney从入门到实战应用
- 6短视频seo源码部署打包分享---开源
- 7基于SpringBoot的点餐系统的设计与实现-计算机毕业设计源码+LW文档_基于springboot的小程序下单系统文献
- 8设计模式C++实现(10)——桥接模式_c++ 实现桥接网络
- 9STM32实现SPI通信1_stm32 spi1
- 10SVN与Git比较_tortoisegit与tortoisesvn的区别
KUKA机器人安全信号的接入方式_库卡机器人安全门锁信号
赞
踩
KUKA机器人的安全信号与IO模块是相互独立的,即安全信号不是通过IO信号接入到机器人里。安全信号主要是指:急停、安全门等属于机器人安全控制类的信号。
一、KUKA机器人安全信号的接入方式有以下3种:
1、第一种方式:Profisafe,以软件包的形式安装机器人KSS系统里,安全信号将通过预先定义的通信协议以Profinet总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置Profinet 总线通信。
2、第二种方式:CIP-Safety,以软件包的形式安装机器人KSS系统里,安全信号将通过预先定义的通信协议以EtherNet IP总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置EtherNet IP总线通信。
3、第三种方式:X11接头+SIB(Safety Interface Board,用于连接安全信号的接口板),安全信号通过线缆的方式接入X11接头里。
注:①第一种方式和第二种方式一般在汽车厂运用比较多。第三种方式在其他通用领域用的多,比如搬运、码垛、弧焊等。
②:KUKA机器人的安全信号均采用双通道方式,以确保系统的安全。
二、安全插头X11的接线方法
由于Profisafe、CIP-Safety两种方式是通过软件通信协议配置安全信号的,在配套PLC软件编程中实现。因此,以下是安全信号通过X11接头的接线方法。X11的接线根据控制柜型号不同,接线方式也不一样,以KRC4类的控制柜为例。
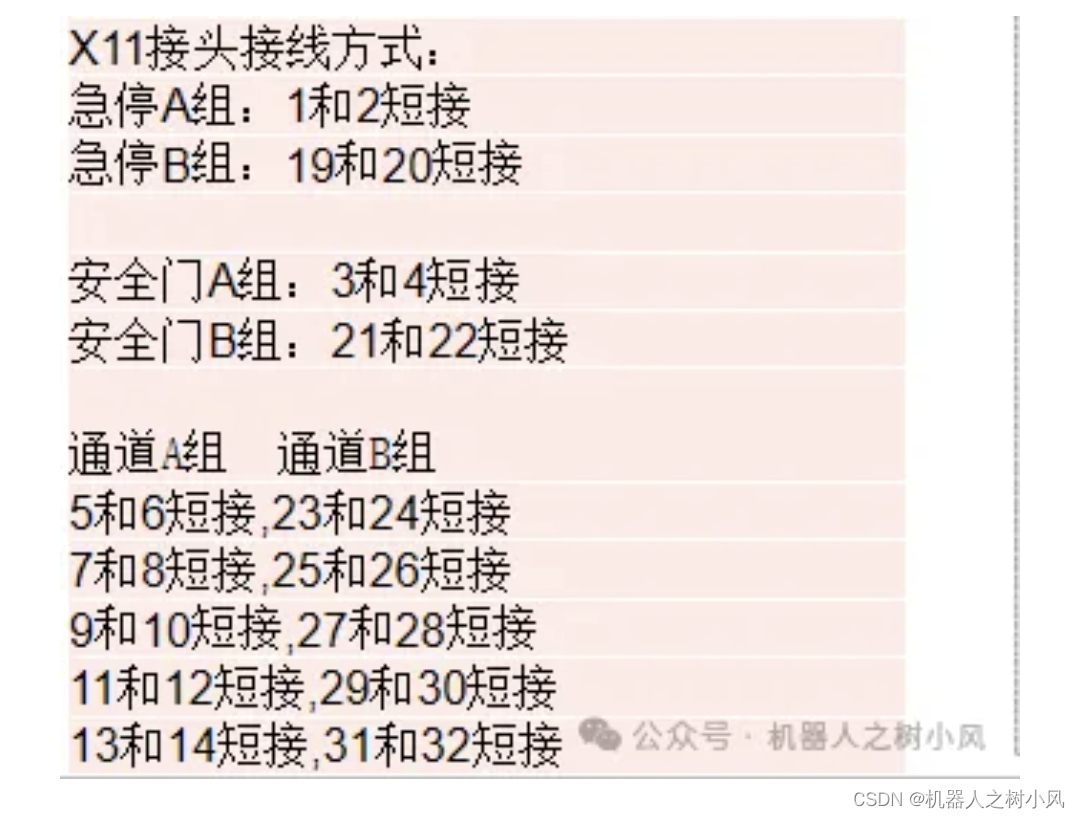
1、KR C4 stand & KR C4 Midsize & KR C4 Extend 控制柜:
急停、安全门信号说明:建议接入相应的安全装置里,如果确定不需要接入,将相应的通道短接即可,如下所示:
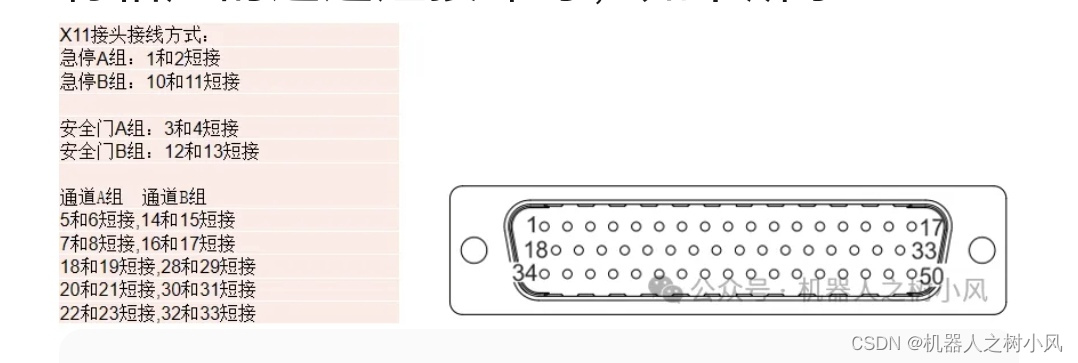
2、KR C4 Compact & KR C4 Smallsize 控制柜:
急停、安全门信号说明:建议接入相应的安全装置里,如果确定不需要接入,将相应的通道短接即可,如下所示:
![[ 漏洞复现篇 ] Apache Spark 命令注入(CVE-2022-33891)_spark漏](https://img-blog.csdnimg.cn/img_convert/63e09af34e440b2285b03bf39af610f2.png?x-oss-process=image/resize,m_fixed,h_300,image/format,png)

