
热门标签
热门文章
- 1iOS开发进阶(一):iOS原生开发环境搭建步骤详解_ios编译环境搭建
- 2昇思25天学习打卡营第13天 | LLM原理和实践:文本解码原理--以MindNLP为例_自回归按照概率下一个词的
- 3Hive---拉链表_hive拉链表
- 4hadoop3.0高可用分布式集群安装_hadoop3.0高可用集群搭建
- 5Git与GitHub之本地仓库_git本地仓库是哪个盘
- 6OPENWRT路由配置IPV6公网访问_ipv6访问路由器
- 7STM32f103入门(12)USART串口信息发送+接收_stm32f103串口接收字符串
- 8Web3.js与智能合约交互_web3 .send写法
- 9Neuralink 将启动第二例人类脑机芯片植入;多项 Claude 3.5 Sonnet AI 工具发布丨RTE 开发者日报
- 10安全加固----二、Tomcat服务安全加固_等保三级tomcat
当前位置: article > 正文
stm32智能小车前进,后退,左转,右转,停止_stm32右箭头
作者:秋刀鱼在做梦 | 2024-07-17 04:33:24
赞
踩
stm32右箭头
本文代码使用 HAL 库。
前言
- 实验小车:STM32F103C8T6。
- 所需软件:keil5 , cubeMX 。
- 实验目的:了解 电机模块如何驱动小车运动。
一、电机模块介绍
TB6612模块是一种常见的双路直流电机驱动模块,广泛应用于机器人、无人机、智能小车等电机控制场景中。它采用TB6612FNG芯片作为驱动控制芯片,提供了可靠的电机驱动功能。

TB6612模块的主要特点和功能:
- 双路电机控制:TB6612模块
可以同时控制两个直流电机的速度和方向。 - 高电流驱动:该模块的驱动电流可达最大1.2A,提供了足够的电流供应能力,适用于各种大小的直
流电机驱动。 - 逻辑电平兼容:TB6612模块采用3.3V或5V逻辑电平兼容,可以直接与微控制器、Arduino等主控
板连接。 - PWM控制:
通过PWM信号可以精确地控制电机的转速,实现速度调节。
二、原理图分析
- TB6612电机驱动模块:
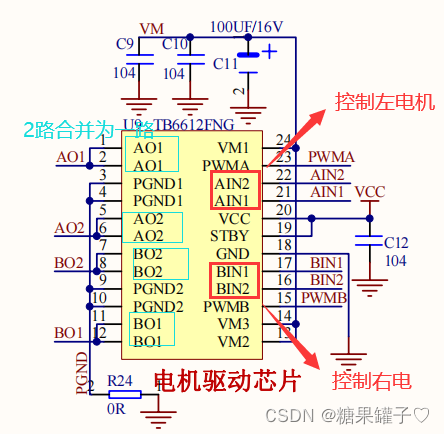
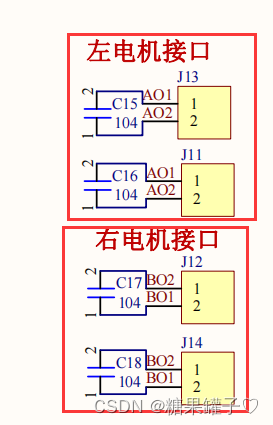
智能小车左右均有2个电机,由于左边两个电机的AO1是合并在一起的,AO2也是合并一起的。所以通过AO1 ,AO2 可以控制左边2个电机。同理,右边通过 BO1,BO2 可以控制右边2个电机。
TB6612 电机驱动模块通过AIN1,AIN2 控制左边2个电机。BIN1,BIN2 控制右边2个电机。
- stm32小车地板电路图:
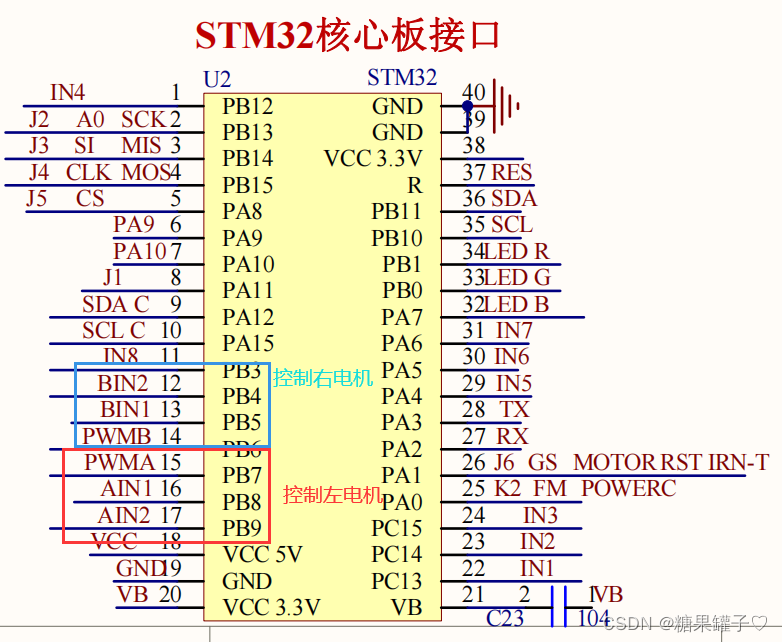
由上图可知:
-
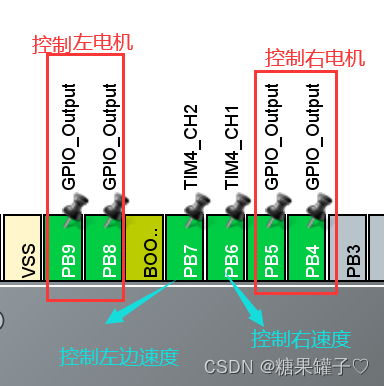
左电机控制:
AIN1 ------------> PB8
AIN2 ------------> PB9
PWMA ------------> PB7 (pwm 调速) -
右电机控制:
BIN1 ------------> PB5
BIN2 ------------> PB4
PWMB ------------> PB6(pwm 调速)
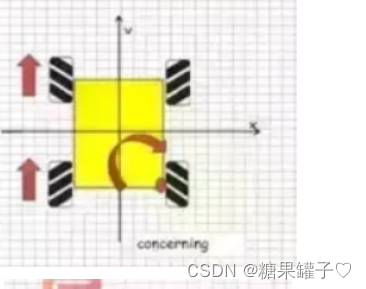
三、电机驱动小车运动原理
控制左右电机引脚输出高低电平控制 小车运行。
1. 小车前进,后退,停止
0 : 引脚输出低电平。 1 : 引脚输出高电平。
驱动 左电机:

驱动 右电机:

2,小车左转,右转
小车右转 ------ > 左电机前进,右电机停止
小车左转 ------ > 左电机停止,右电机前进
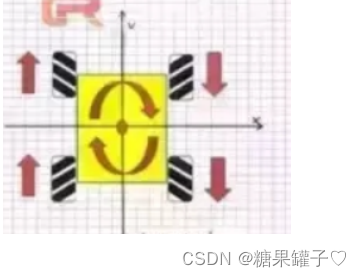
3,左自旋,右自旋
小车右自旋 ------ > 左电机前进,右电机后退
小车左自旋 ------ > 左电机后退,右电机前进
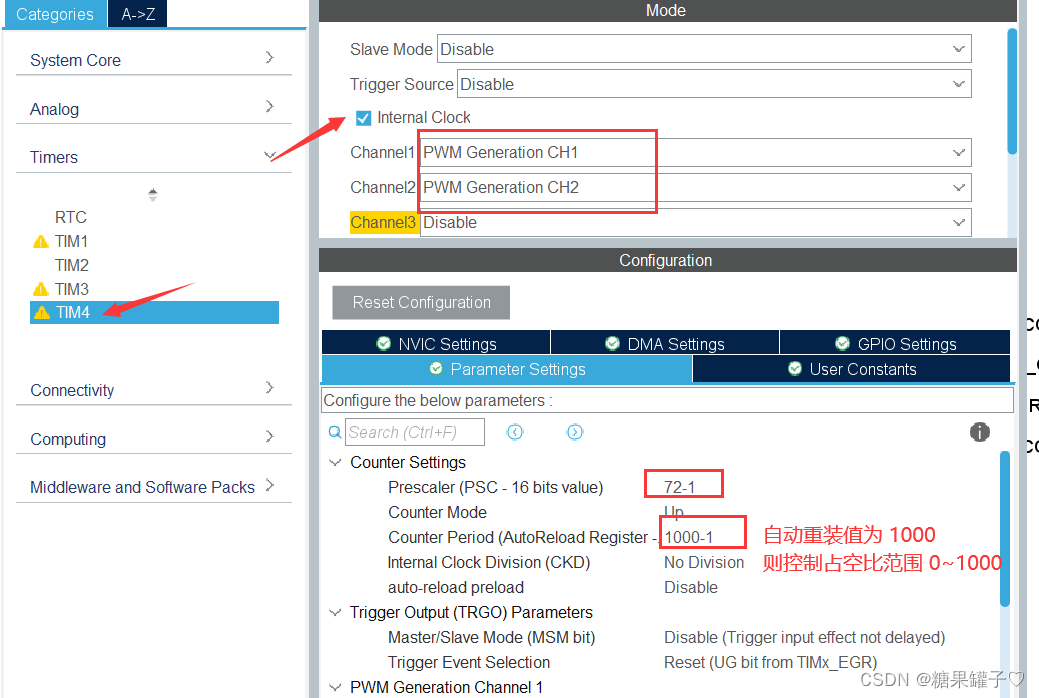
四,cubeMX 配置
- 设置引脚:
- 选择 定时器的PWM功能,便于电机调速
五,代码模块化编写
采用模块化的编程,将 小车的电机驱动封装在一个驱动文件中。
motor.h:
#ifndef _MOTOR_H_
#define _MOTOR_H_
/* 电机初始化 */
void motor_init(void);
/* 左电机控制 */
void Left_motor(int mode, int speed);
/* 右电机控制 */
void Right_motor(int mode, int speed);
/* 小车运动,mode:1前进,2后退,3左转,4右转 */
void Car_sport(int mode, int speed);
#endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
motor.c:
#include "motor.h"
#include "main.h"
extern TIM_HandleTypeDef htim4;
/* 电机初始化 */
void motor_init(void)
{
// 开启 PWM 功能
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_2);
}
/* 左电机控制,mode:1前进,2后退,0停止 */
void Left_motor(int mode, int speed)
{
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_1, speed); //设置占空比 0~1000
if(mode == 1)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET);
}
else if(mode == 2)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET);
}
else if(mode == 0)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET);
}
}
/* 右电机控制,mode:1前进,2后退,0停止 */
void Right_motor(int mode, int speed)
{
__HAL_TIM_SET_COMPARE(&htim4, TIM_CHANNEL_2, speed); //设置占空比 0~1000
if(mode == 1)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET);
}
else if(mode == 2)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);
}
else if(mode == 0)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);
}
}
/* 小车运动,mode:1前进,2后退,3左转,4右转,5左自旋,6右自旋,0停止 */
void Car_sport(int mode, int speed)
{
if(mode == 1)
{
Left_motor(1,speed);
Right_motor(1,speed); // 前进
}
else if(mode == 2)
{
Left_motor(2,speed);
Right_motor(2,speed); // 后退
}
else if(mode == 3)
{
Left_motor(0,speed);
Right_motor(1,speed); // 左转
}
else if(mode == 4)
{
Left_motor(1,speed);
Right_motor(0,speed); // 右转
}
else if(mode == 5)
{
Left_motor(2,speed);
Right_motor(1,speed); // 左自旋
}
else if(mode == 6)
{
Left_motor(1,speed);
Right_motor(2,speed); // 右自旋
}
else if(mode == 0)
{
Left_motor(0,speed);
Right_motor(0,speed); // 停止
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
总结
下篇文章为大家介绍 红外 避障。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/秋刀鱼在做梦/article/detail/837991
推荐阅读

相关标签

