
热门标签
热门文章
- 1hive解析json_hive json解析函数
- 2一文读懂火爆的AI Agent(智能体)
- 3手撕数据结构---------顺序表和链表
- 4面试篇-SpringBoot自动配置原理_面试springboot自动配置原理
- 5【LSTM分类】长短时记忆神经网络结合多头注意力机制LSTM-Mutilhead-Attention数据分类【含Matlab源码 4266期】_长短效神经网络
- 6【无人直播】录播分析-虚拟摄像头_android虚拟摄像头无人直播
- 7JetBrains学生正版全家桶授权(大学4年免费)获取教程-idea学生免费许可解决方法_jetbrains学生认证
- 8详解数据结构之队列、循环队列(源码)
- 9逆向工程实验_lab0(密码学算法逆向)_密码逆向工程
- 10OpenHarmony教程指南—ArkTS时钟_arkts getdefaultdisplay
当前位置: article > 正文
【DL】3D点云 TSDF算法三维重建_signed distance function 在3d点云上的使用
作者:空白诗007 | 2024-07-29 20:18:31
赞
踩
signed distance function 在3d点云上的使用
点云
视频:3D点云+三维重建
三维重建(单目、双目、多目、点云、SFM、SLAM)
- 无序:只是点的位置(+法向量)-》max和求和
- 近密远疏:激光雷达等设备的扫描与视角不同
- 非结构化数据:直接用CNN难
点云特征提取的主干网络
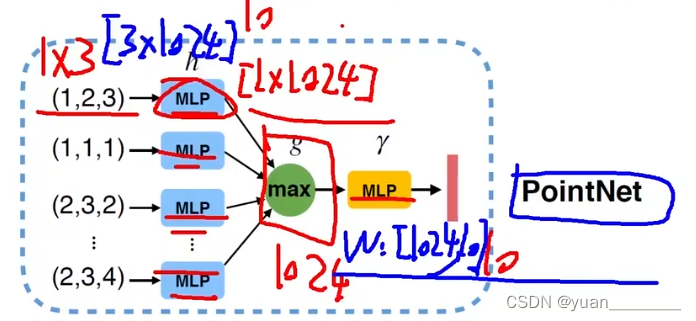
PointNet
PointNet++
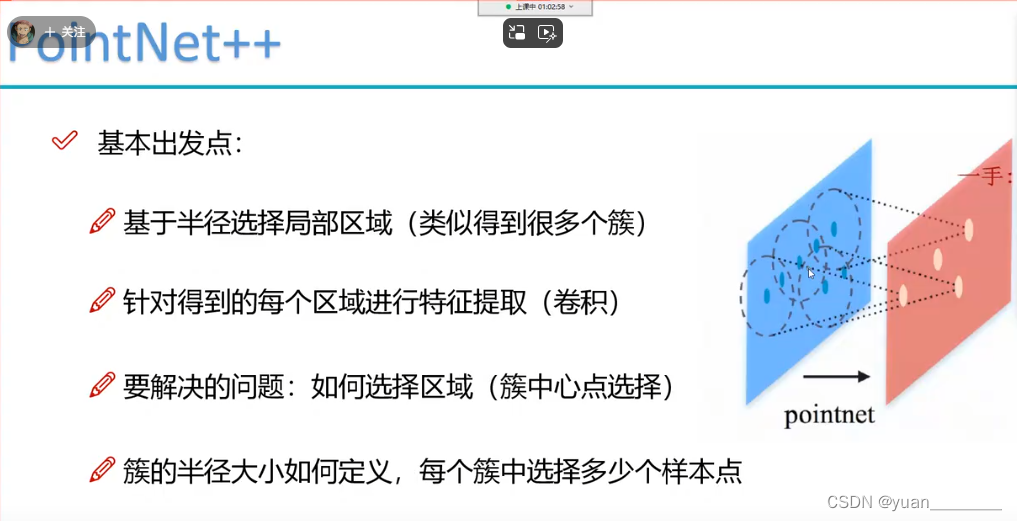
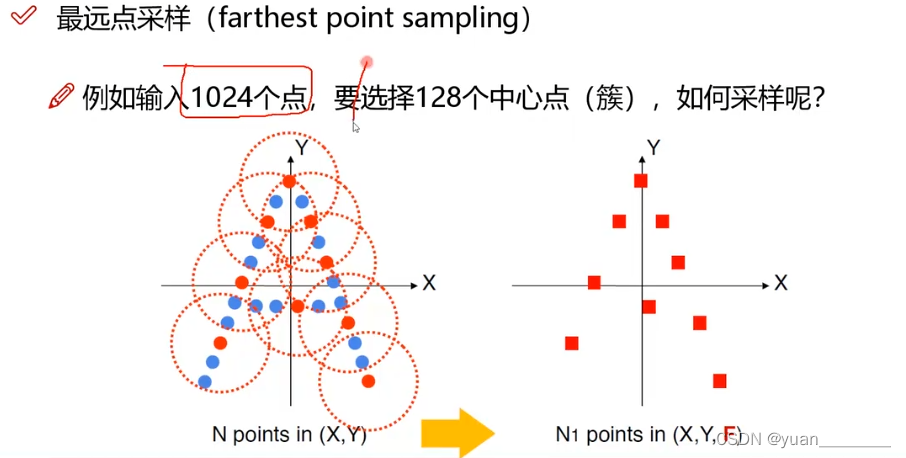
- 最远点采样:选中心点,尽可能覆盖到所有点云区域
点云任务
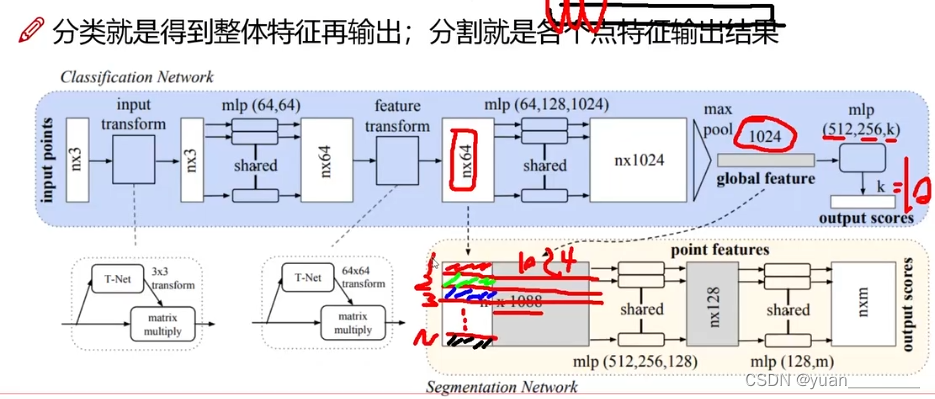
- 检测:定位 + 分类(Classification):
- 分割(Segmentation):部件、场景
- 补全
- 生成
- 配准
基于RGB-D图像的三维重建
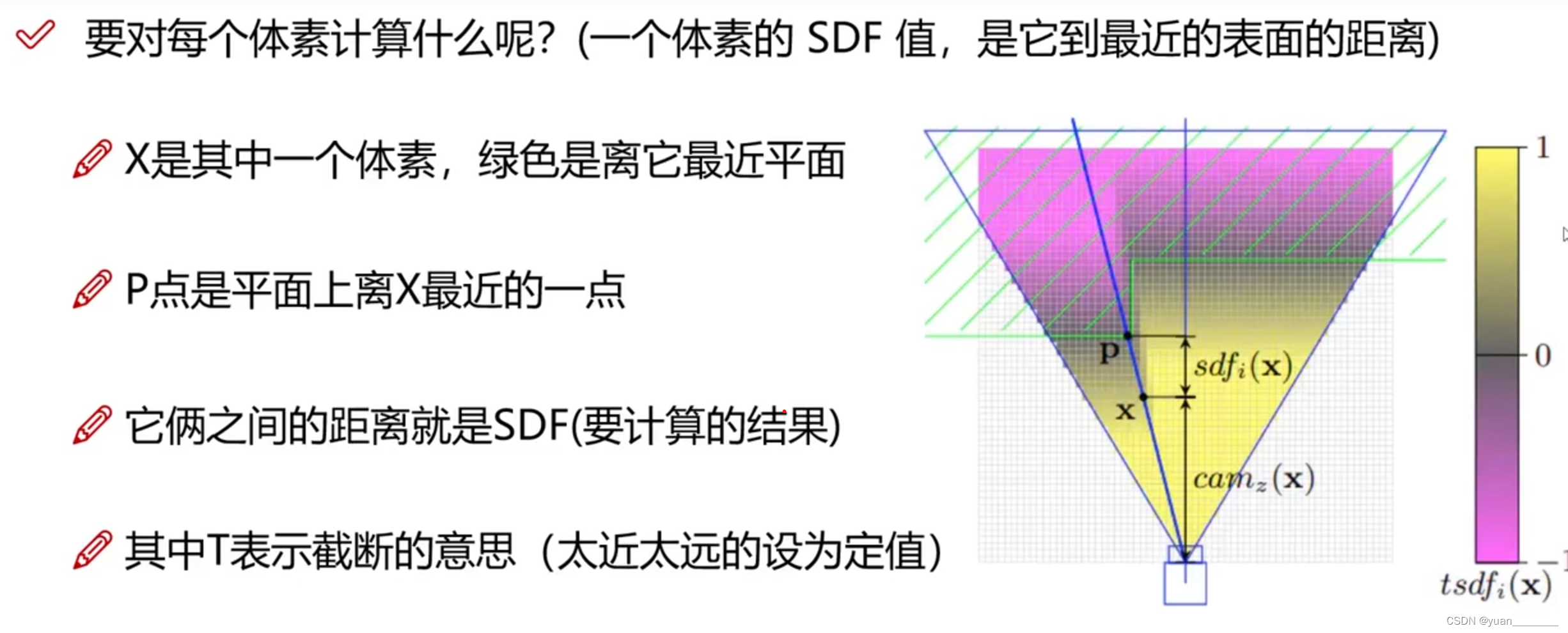
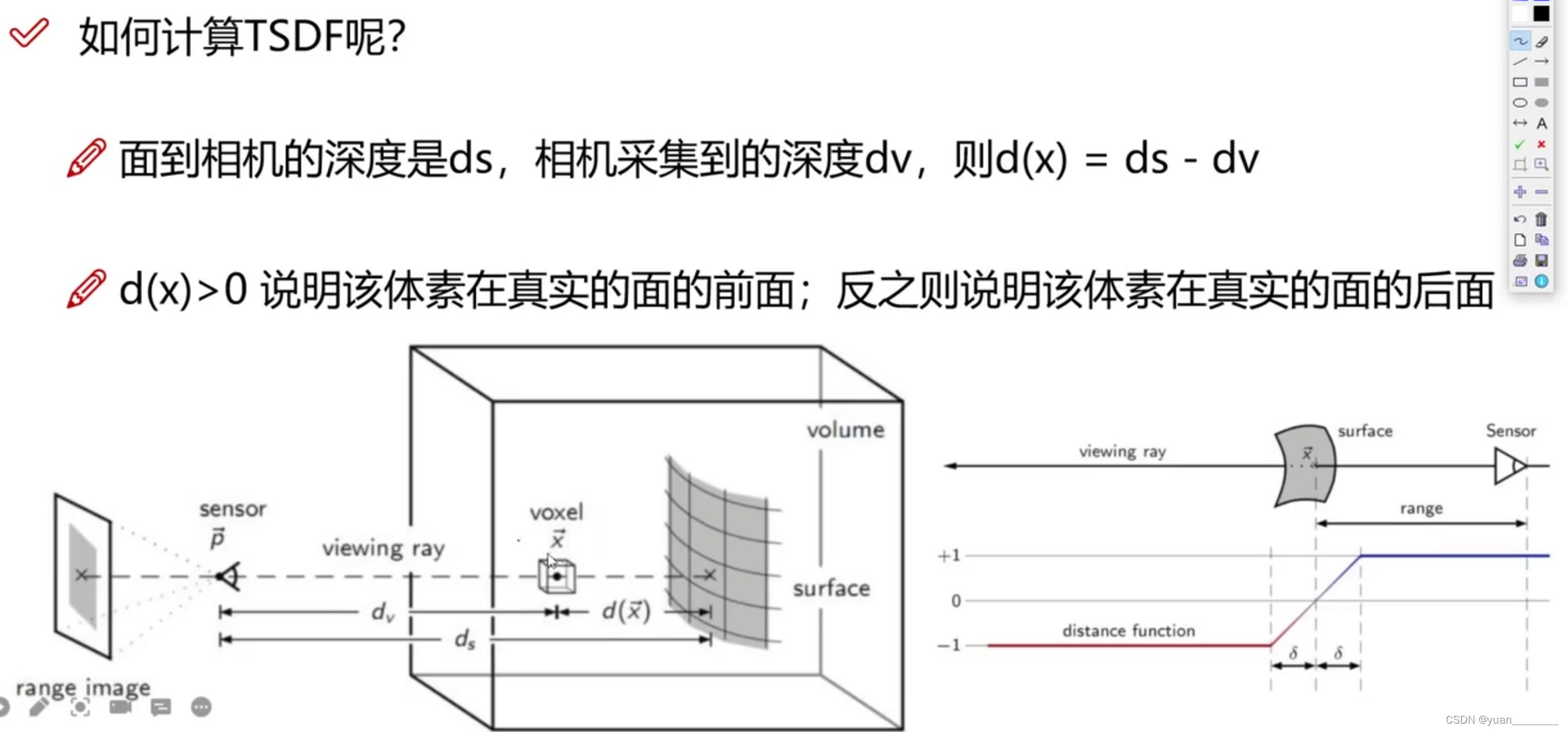
算法TSDF:Truncated Signed Distance Function截断符号函数
- 2D图像
- (2D图像的)深度图
- 相机位姿
- 相机内参
案例:三维重建:基于RGB-D数据集的TSDF算法
# CUDA 11.8
pip install torch==2.2.2 torchvision==0.17.2 torchaudio==2.2.2 --index-url https://download.pytorch.org/whl/cu118
# opencv
opencv-contrib-python 4.5.1.48
opencv-python 4.5.1.48
# pip
pycdua
numba
scikit-image
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
问题
# warning:缺少cl.exe -> 添加环境变量
C:\Program Files\Microsoft Visual Studio\2022\Community\VC\Tools\MSVC\14.38.33130\bin\Hostx64\x64
- 1
- 2
点云相关
三维重建软件和库:
软件
PCV(Point Cloud Viewer, PCV)设计与实现
PCV环境搭建
库
参考
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/空白诗007/article/detail/900423
推荐阅读
相关标签

