
- 1深度学习-Pytorch同时使用Numpy和Tensors各自特效
- 2linux系统管理与服务器配置高志君课后答案_Linux系统管理习题(附答案)
- 3springcloud-alibaba (06)RocketMQ控制台安装与启动_rocketmq 控制台端口
- 4华为的笔记本电脑能不能用鸿蒙,万能的网络请问一下鸿蒙出来以后我的笔记本WIN10的能换上鸿蒙吗老系统真的用够了?...
- 5idea CodeGPT插件
- 6深度学习的算法实践和演进_int4量化
- 7Android程序捕获未处理异常,处理与第三方方法冲突时的异常传递
- 8docker项目部署(一)_docker安装计划表
- 9css阴影教程,CSS高级技巧:阴影效果
- 10leetcode 矩阵置零 java_lecode如果一个元素为0,将其所在横和列都设为0
2022最新!更面向工业场景:基于视觉方案不同挑战下的车道检测与跟踪
赞
踩
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
后台回复【车道线综述】获取论文!
领域背景
由于突然的环境变化可能导致严重的车辆碰撞,当道路车道线的能见度较低、模糊或经常看不见时,驾驶非常困难。在车道线检测方面已经进行了大量的研究,大多数车道检测方法都存在四种主要问题:
(i)由于时间(白天、夜晚)、天气、道路等变化而导致的突然照明变化;
(ii)当车道线着色、侵蚀或堵塞时,部分或全部被遮挡;
(iii)雨雪等恶劣天气造成的视野模糊;
(iv)由于存在其他类似特征,如护栏、路面标记、道路,导致车道检测不正确分隔线、车辆线、树影等;
本文作者提出了一种鲁棒的车道检测和跟踪方法来检测车道线,该方法主要介绍了三个关键技术。首先,应用双边滤波器来平滑和保留边缘,引入了一个优化的强度阈值范围(OITR)来提高canny算子的性能,该算子检测低强度(有色、腐蚀或模糊)车道标记的边缘。第二,提出了一种稳健的车道验证技术,即基于角度和长度的几何约束(ALGC)算法,然后进行霍夫变换,以验证车道线的特征并防止不正确的车道线检测。最后,提出了一种新的车道线跟踪技术,即水平可调车道重新定位范围(HALRR)算法,该算法可以在左、右或两条车道标记在短时间内部分和完全不可见时跟踪车道位置。为了评估所提出方法的性能,论文使用了分辨率为1080x1920,分辨率为24帧/秒的DSDLDE数据集,其中视频帧包含不同的挑战场景。实验结果表明,平均检测率为97.36%,平均检测时间为29.06msec/帧,优于现有方法。
领域现状
车道线是道路的一个非常重要的部分,因为许多交通规则和法规都基于车道线,因此,高级驾驶员辅助系统的性能在很大程度上取决于车道线检测。准确率和鲁棒性是车道线检测两个最重要的特性。由于环境存在剧烈变化,因此检测车道线是非常困难的。车道线检测是不同高级驾驶员辅助系统(ADAS)的基本操作,例如车道偏离警告系统(LDWS)和车道保持辅助系统(LKAS)。一些汽车企业,如Mobileye、BMW、Tesla等,已经开发了包括车道偏离警告和车道保持辅助系统在内的产品。无论是汽车企业还是个人客户都接受了Mobileye系列ADAS产品和特斯拉Autopilot自动驾驶。由于其低成本、高精度和高速性能,目前大多数成熟的车道线检测辅助产品将camera用作主要传感器。
Aly[4]使用RANSAC样条拟合技术检测到城市街道的车道标记,在[5]中,算法快速准确地估计了消失点,估计的消失点确定了属于车道标记的线段。因此,它可以检测阴影下的车道,但当混淆路面标记或道路上存在行人过路时,它不起作用。在[6]中,作者使用了一种方法,在夜间道路、黄灯或白灯隧道、雨夜等照明条件下为车道线提供强边缘,但在极端条件下效果不佳,因为他们假设一个场景没有多个照明。[7] 通过检测消失点和建立自适应感兴趣区域(ROI),降低了计算复杂度,并能够检测黄灯隧道、日出、日落、雨天、夜晚等照明下的车道,但它无法检测强光反射下的车道、模糊车道标记、低太阳角情况和车道裂缝。在[8]中,通过基于投票图检测消失点、定义自适应ROI和使用车道颜色的不变性检测车道来克服照明变化影响。然而,他们的方法在一些极端条件下失败,如强光反射、车道标记模糊、低太阳角情况、车道裂缝等。[9]提出了一种基于时空图像的车道线检测算法,由于使用了每条扫描线上车道宽度的时间一致性,他们成功地检测到了曲率急剧的车道、车道变化、夜间道路、障碍物和镜头光斑。由于检测结果取决于车道线宽度,当车道线宽度在道路上增加或减少时,系统将无法检测车道。
[10]中提出了一个基于视觉的集成框架,该框架基于时空增量聚类,结合曲线拟合和格拉斯曼流形学习,用于车道检测、跟踪和路面标记检测。在[1]中,将梯度提示和颜色提示以及带有扫描线测试的线聚类一起处理以验证车道线特征的算法,他们在各种天气条件下成功地检测到了车道。然而,当车道由于路灯反射而不可见时,他们无法检测到车道标线,当车道线因夜间路灯或黄灯隧道的黄色背景而变得模糊时,他们也无法检测到黄色车道标线。
论文主要创新点
为了克服上述困难,作者提出了一种鲁棒的车道线检测和跟踪系统。为了减少照明效果并增强车道线边缘,在作者之前的论文[12]中首次在车道检测系统中使用了双边滤波器。因此,本文对灰度输入图像进行了双边滤波,以平滑和保留车道边缘。接下来,在边缘检测阶段接近优化的强度阈值范围(OITR),这提高了精明边缘检测器的性能,以增强和检测低强度(着色、侵蚀或模糊)车道标记的边缘。为了去除不需要的噪声线边缘区域,论文选择了一个感兴趣的区域,使用等腰梯形遮罩放置在水平轴的中间和垂直轴的三分之二(不包括下三分之一),以避免汽车mask边缘。为了检测感兴趣区域内的所有线条,使用了霍夫变换。通过霍夫变换检测到的线是候选车道线(CLL)。
这里,论文使用基于坡度的约束将候选左车道(CLL)线与候选右车道(CRL)线分离,提出了一种稳健的车道验证技术,即基于角度和长度的几何约束,以验证车道标记的特征并防止不正确的车道检测。最后,介绍了一种新的车道跟踪方法,即水平可调车道重新定位范围,它可以跟踪车道位置,提出方法的主要贡献是:
1)在边缘检测阶段接近优化的强度阈值范围(OITR),这提高了canny增强和检测低强度(着色、侵蚀或模糊)车道标记边缘的性能;
2)提出了一种稳健的车道验证技术,即基于角度和长度的几何约束(ALGC)算法,以验证车道线特征;
3)引入了一种新的车道跟踪方法,即水平可调车道重新定位范围(HALRR),以在左侧或右侧或两侧车道标线由于侵蚀或闭塞而在短时间内部分或完全不可见时,跟踪车道位置;
论文方法
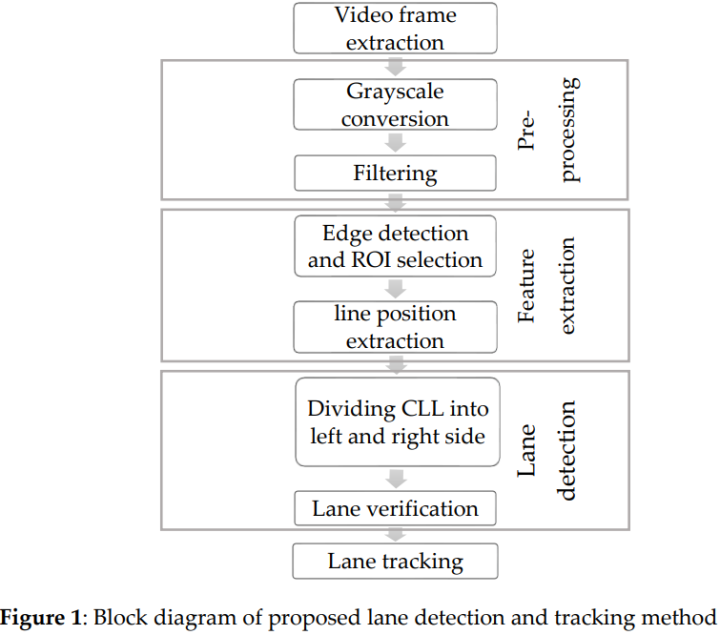
这里,我们将提出的车道检测和跟踪方法分为四个主要部分:i)预处理,ii)特征提取,iii)车道检测和iv)车道跟踪,拟议车道检测方法的概述如图1所示。在预处理阶段,对提取的视频帧进行灰度处理,并使用双边滤波器去除噪声,同时保留边缘。接着,在特征提取阶段,通过OITR改进的canny边缘检测器检测边缘,并利用霍夫变换提取线的位置。然后,在车道检测阶段,提出了一种基于角度和长度的几何约束的鲁棒车道验证技术,成功地验证了候选车道线。最后,引入了一种鲁棒的车道线跟踪技术,提出了水平可调车道线重新定位范围,它利用前一帧的车道位置信息来预测当前帧的车道定位!
预处理
预处理是车道线检测过程的重要组成部分,预处理的目的是增强感兴趣的特征并减少噪声,论文通过灰度转换和噪声滤波对输入视频帧进行了预处理!
特征提取
在特征提取阶段,识别特定车道线特征,如边缘、纹理、长度、宽度或颜色等。在这种情况下,当照明条件急剧变化,尤其是在雨雪天气中,视野变得模糊和模糊时,很难通过颜色或纹理特征区分道路和车道。在各种照明条件和不利天气条件下,基于边缘的特征比基于颜色的特征更鲁棒。因此,在该方法中,论文考虑了边缘特征作为车道检测方法。
有很多边缘检测技术,如Sobel、Canny、Prewitt、Roberts等[15]将模糊方法应用于车道检测和Canny以获得更好的边缘检测。在[18]中,对canny和Sobel的性能进行了比较,实验表明canny优于Sobel。Canny是一个多步骤算法。首先,用高斯去除噪声,然后确定边缘梯度和方向。接下来,应用了一种称为非最大抑制的边缘细化技术。最后,利用双阈值方法检测并连接候选边缘。
这种双阈值方法使用两个阈值[
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

