
- 1鸿蒙开发实战项目:录音变声应用
- 2问答机器人三种实现方式_智能问答机器人实现方案有哪些
- 3linux中函数使用,Linux中likely 函数的使用分析
- 4毕设项目分享 深度学习垃圾分类
- 5Python_机器学习_算法_第3章_3.逻辑回归_python逻辑回归
- 6android databinding 之自定义控件_andatabinding 自定义组合控件
- 7迅为RK3399开发板瑞芯微国产安卓工控核心板边缘计算AI人工智能_buzzer1 klj-5018
- 8MATLAB高光谱图像处理基础_matlab展示三波段
- 9深度学习6. 多层感知机及PyTorch实现_利用 pytorch 编写一个有三个层的多层感知机模型及其训练过程,要求输入 单元有 78
- 10Mysql常用show命令,show variables like xxx 详解,mysql运行时参数
惯性导航原理(1):导航坐标系及相互转换_惯导坐标转换
赞
踩
一、导航坐标系转换
写在前面(本人是导航专业,目前已经毕业入职,工作也是与惯导、组合导航相关,因为以前的知识忘的差不多了,所以开个帖子,会分几章记录一下,如有不正确的地方还请大家多多指教)
补充 由于不同参考资料中,经纬度表示不同,有的是L表示纬度, λ \lambda λ表示经度,有的是B表示纬度,L表示经度,由于本文参考了很多资料,且博主较懒,不想打公式因此文中经纬度、卯酉圈子午圈符号有些混乱,但是已在文中加了注释
坐标系介绍
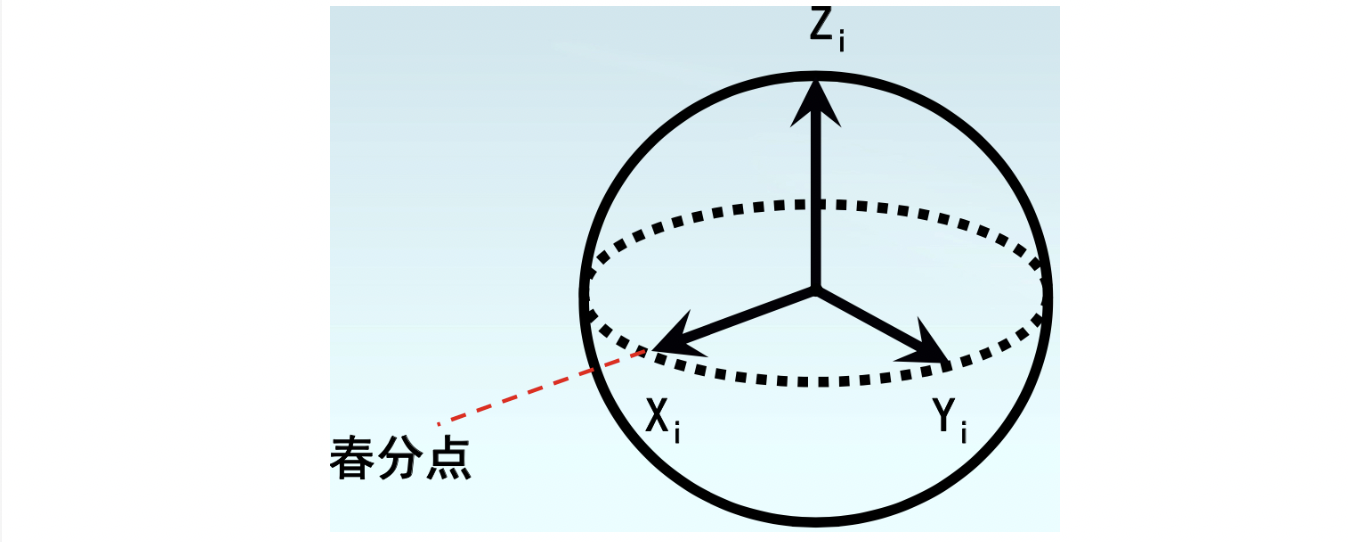
1、惯性坐标系(地心惯性坐标系)i系
O-XiYiZi,角标常用i表示。取地球中心为坐标原点O,OZ轴沿地球自转轴方向,OX轴是地球绕太阳公转的黄道平面与地球赤道平面的交线,OY轴沿右手规则确定。需要注意:地心坐标系是不与地球固联的,它不随地球自转而转动。(IMU(加表、陀螺)测量的就是相对于惯性系的运动)
2、地球坐标系(地心地固坐标系)e系
其原点为地球的质心,X轴延伸通过本初子午线(0度经度)和赤道的交点;Z轴延伸通过的北极(即与地球旋转轴重合);Y轴与X、Z轴形成右手坐标系,穿过赤道和90度经度。常表示为O-XeYeZe。导航中,一般关心的是载体相对于地球的位置,故e系常作为参考坐标系。
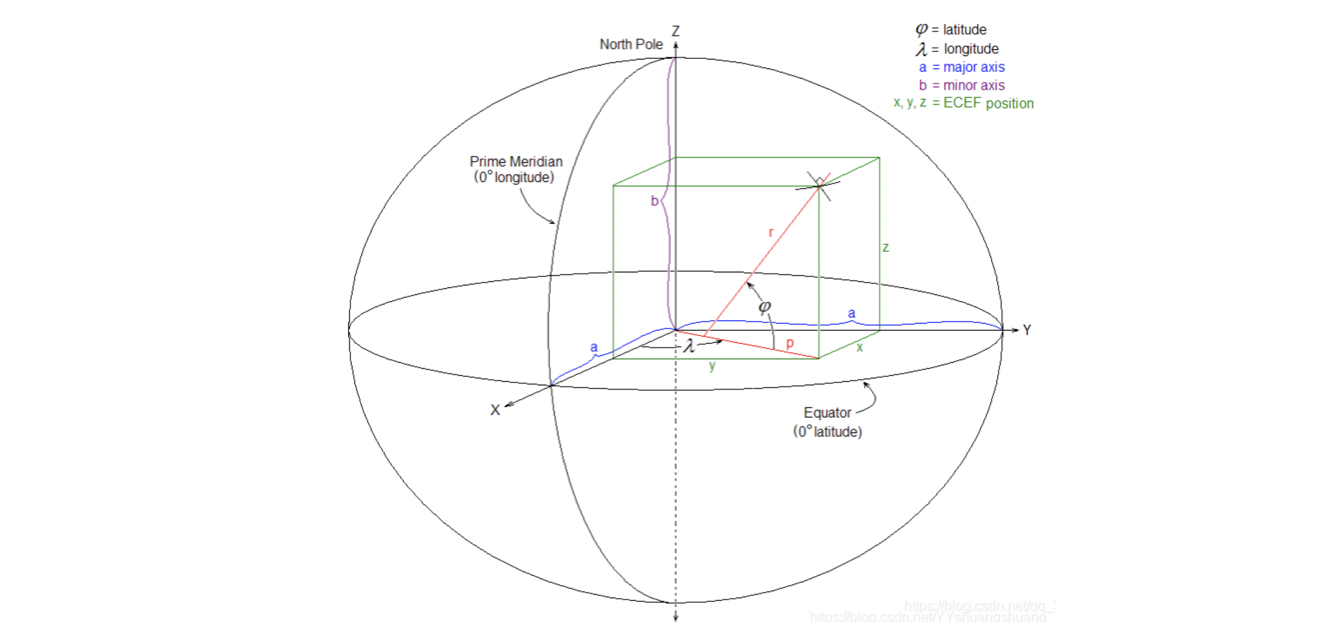
3、WGS-84坐标系(常用)blh坐标系
wgs84表示的就是地理经纬度,也叫经纬高坐标系(经度(longitude),纬度(latitude)和高度(altitude)LLA坐标系)。我们常说的经纬度一般都是wgs84。只不过由于地球是不规则的,所以地理坐标系分为很多种,GPS是美国的,采用的就是WGS84坐标系,中国一般使用北京54、西安80、China2000等。WGS-84坐标系的X轴指向BIH(国际时间服务机构)1984.0定义的零子午面(Greenwich)和协议地球极(CTP)赤道的交点。Z轴指向CTP方向。Y轴与X、Z轴构成右手坐标系。
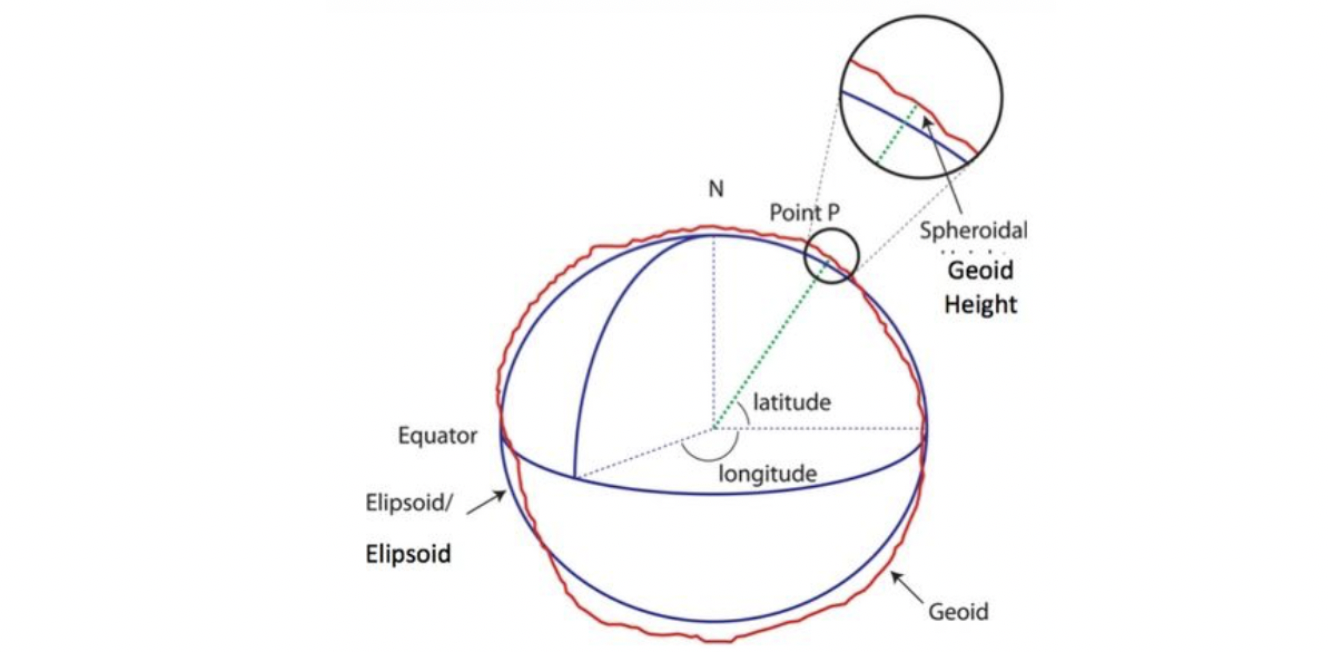
1、大地纬度是过用户点P的基准椭球面法线与赤道面的夹角。纬度值在-90°到+90°之间。北半球为正,南半球为负。
2、大地经度是过用户点P的子午面与本初子午线之间的夹角。经度值在-180°到+180°之间。
3、大地高度h是过用户点P到基准椭球面的法线距离,基准椭球面以内为负,以外为正。
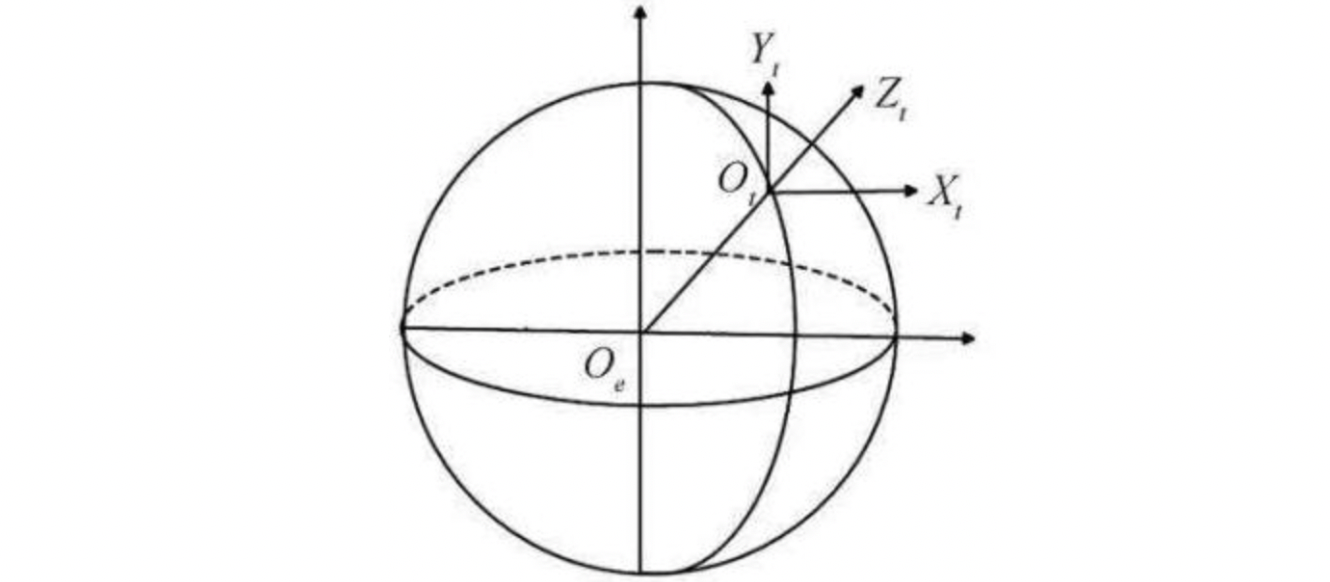
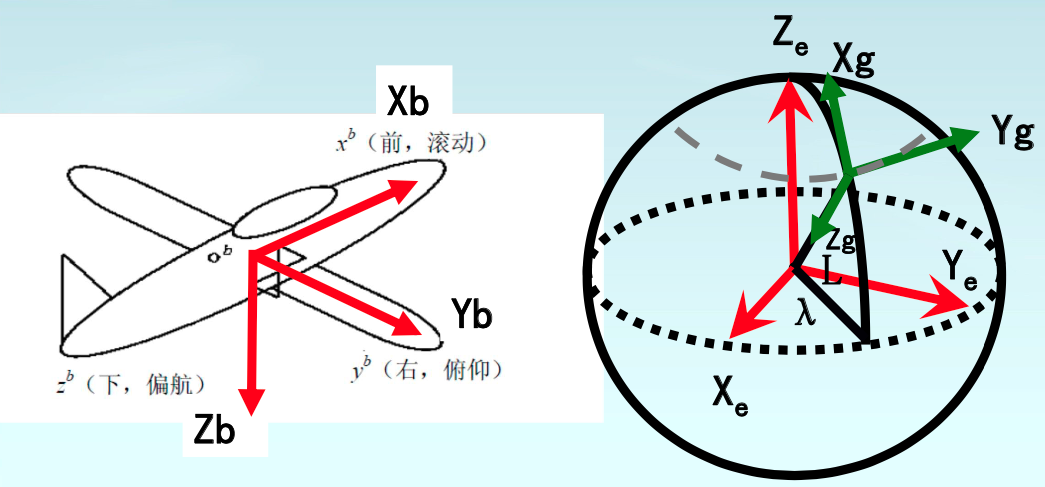
4、当地水平地理坐标系g系(常用东北天ENU或者北东地NED)
以东北天坐标系为例:
以点P为原点,以 P点的法线为Z轴,指向天顶为正,以子午线方向为Y轴,指向北为正,X 轴与YZ 平面垂直,向东为正
北东地坐标系定义为:X轴:指向正北;Y轴:指向东向;Z轴:与XY轴形成右手坐标系,指向地向。
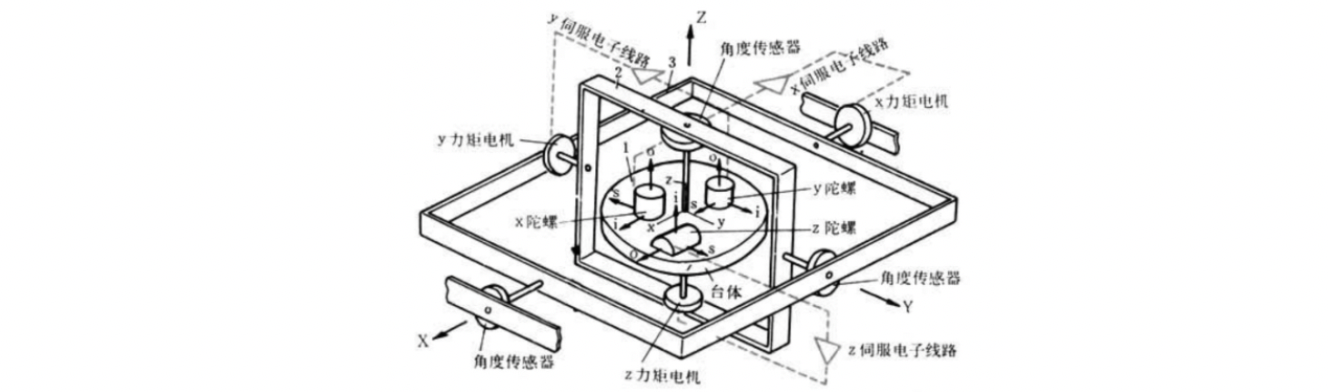
5、平台坐标系p系
描述平台式惯导系统中平台指向的坐标系叫做平台坐标系,它与平台固连。如果平台无误差,指向正确,则这样的平台坐标系称为理想平台坐标系。(目前我使用的基本是捷联惯导,所以这个坐标系下文几乎不会涉及,仅仅这里介绍一下)
6、导航坐标系n系
导航坐标系是惯性导航算法的基本参考系,运动物体在导航坐标系内进行位置、速度、姿态确定,可选取e系或g系做为导航系。在e系内导航,可以直接确定地心地固系下的导航参数,便于和GNSS 等大地测量手段相结合,在惯性导航中,经常将地理坐标系g作为导航坐标系。值得注意的是,导航坐标系只是一个“虚”的概念。
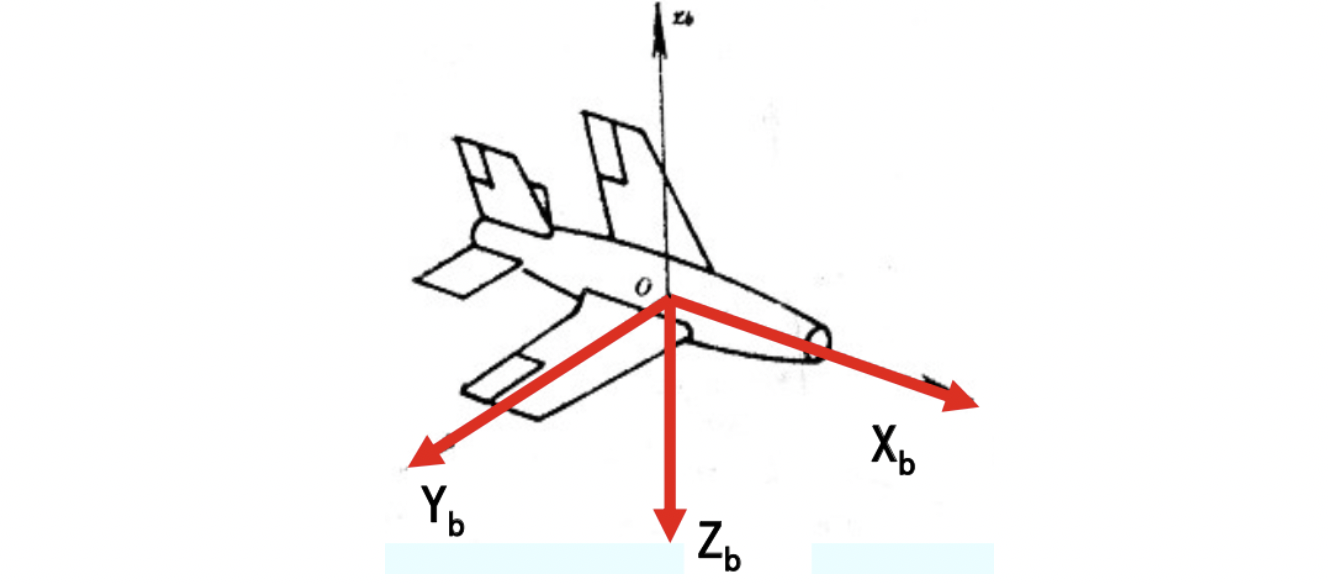
7、载体坐标系b系
该系固定在载体上,时刻随着载体运动而运动。其原点与载体质心重合。
与东-北-天对应的载体系是右-前-上坐标系,X轴沿运载体横轴线指右,Y轴沿纵轴指前,Z轴沿运载体竖向并与X、Y轴构成右手直角坐标系。
与北-东-地对应的载体系是前-右-下坐标系,X轴沿载体纵轴指前,Y轴指右,Z轴沿载体竖轴与X、Y轴构成右手直角坐标系。
坐标系间的相对转换关系
1、惯性坐标系i系<=>地心地固坐标系e系
惯性坐标系i与地心地固坐标系e系之间原点重合,二者之间存在相对旋转,角速度指向Z轴,自西向东旋转,地球自转角速度(e系相对于i系)为7.292115e-5 rad/s,i系到e系的坐标转换矩阵为:
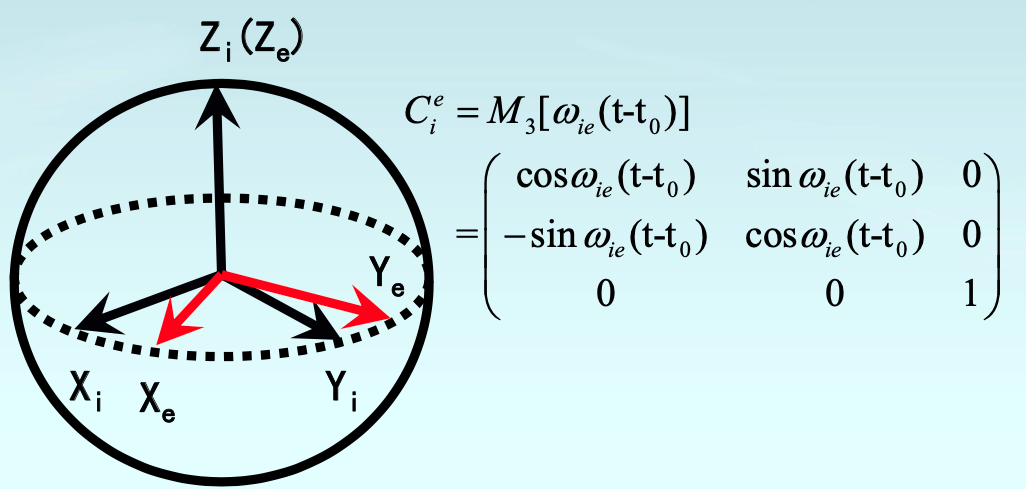
而e系到i系的坐标旋转矩阵只需要将i系到e系的坐标转换矩阵转置即可。
2、blh坐标系<=>地心地固坐标系e系
求解blh坐标系与地心地固坐标系间的坐标旋转矩阵之前,需要了解何为子午圈半径与卯酉圈半径:
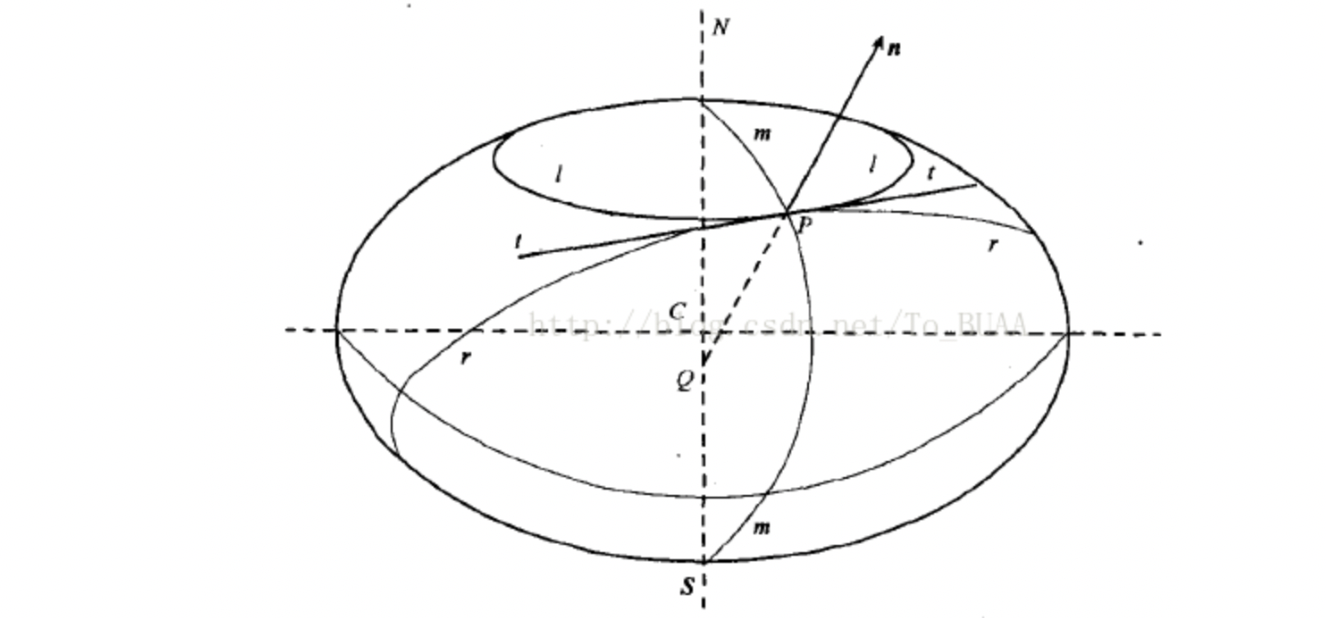
设P点为旋转椭球体上某一点,n为P点处的法线,NS为椭球面的对称轴,过P作NS的垂直平面,截椭球面所得的平面曲线lPl称为P点处的纬圈,过P点和直线NS作平面截椭球面所得的平面曲线mPm称为 经圈(子午圈),过P点作纬圈lPl的切线tPt,用tPt和法线n形成的平面截椭球面所得的平面曲线rPr称为P点处的卯酉圈。P点处沿子午圈mPm的曲率半径Rm(有称Rn)为子午圈曲率半径,沿卯酉圈的曲率半径rPr的曲率半径Rn(有称Re)卯酉圈曲率半径。计算公式如下:
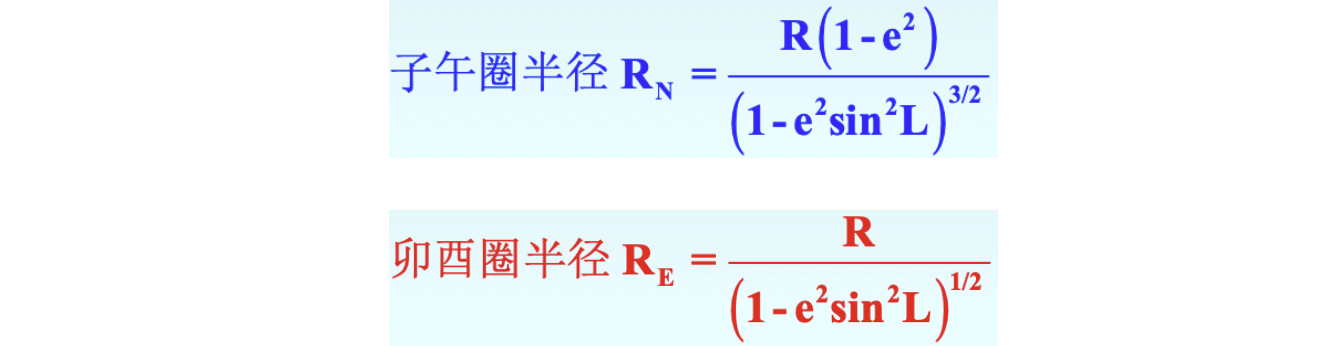
其中,R为地球赤道半径(椭圆的长半轴),WGS-84模型中,R = 6378137m,e为第一偏心率,e = 0.0818191908426,f为第一扁率,f = 1/298.257223563。
在高度为h处的子午圈半径为Rn+h,卯酉圈半径为Re+h。
则:blh坐标系->地心地固坐标系e系的坐标转换矩阵为:
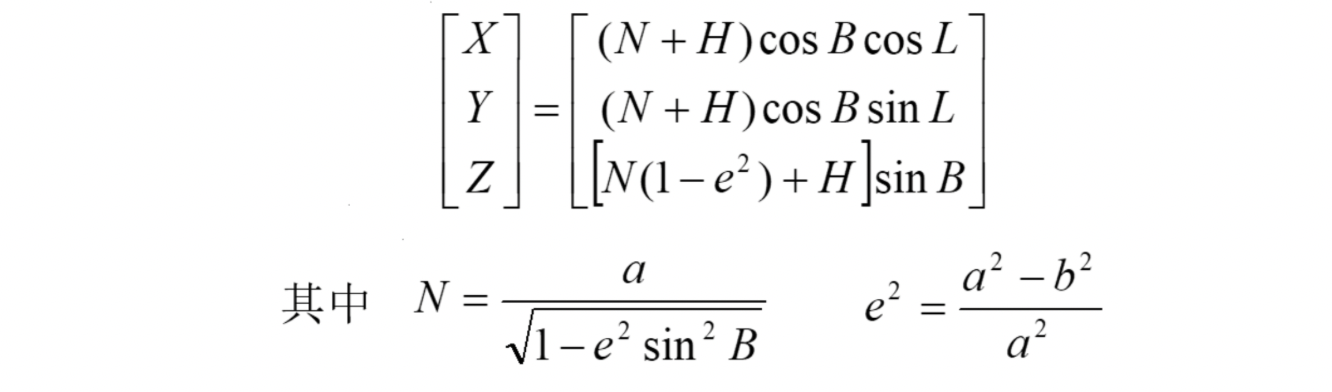
上式中:N为卯酉圈曲率半径(同上面的Re);a为地球椭球的长半轴;b为地球椭球的短半轴,B为P点的纬度,L为P点的经度。
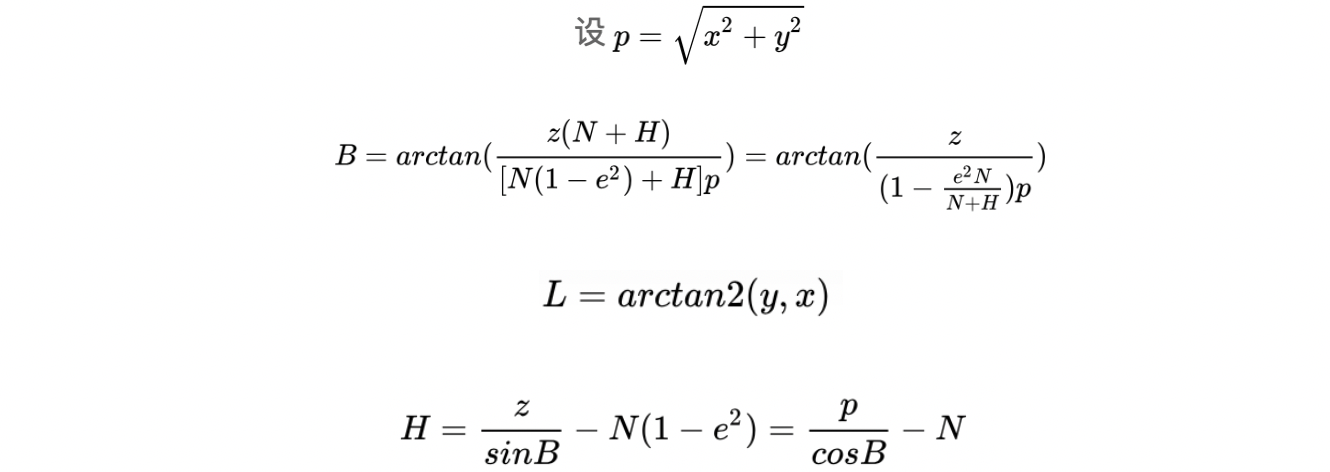
地心地固坐标系e系->blh坐标系的坐标转换矩阵为:
3、地心地固坐标系e系<=>当地水平地理坐标系g系
地理坐标系g与地球坐标系e之间的转动关系可以用方向余弦阵表示,常称之为位置矩阵:
1、g系选取为东北天坐标系
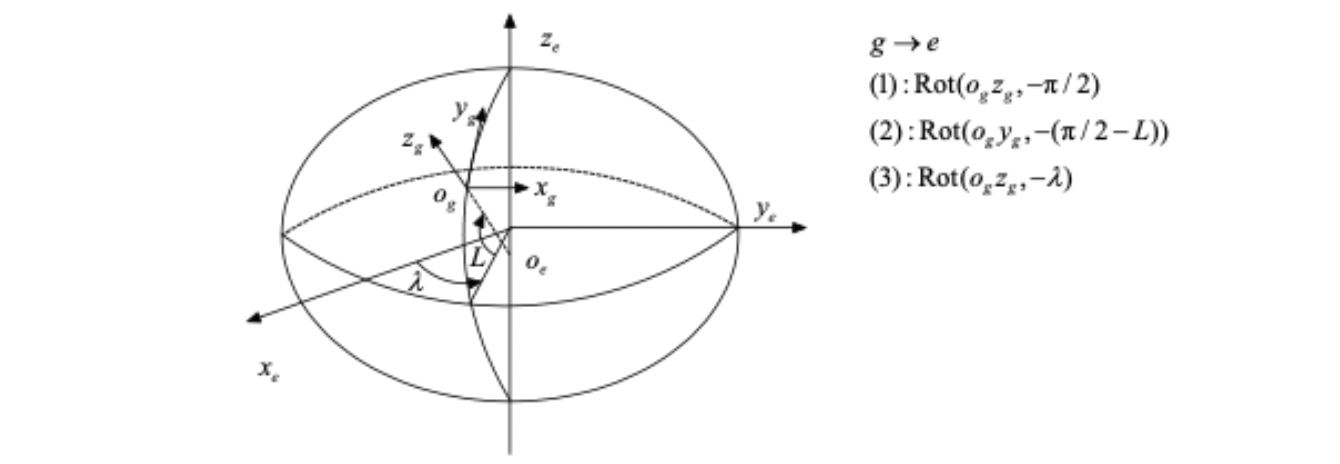
g系先绕OZ轴转动-pi/2,接着绕OY轴转动-(pi/2-B),其中B为纬度(弧度表示),再绕OZ轴转动-L,其中L为经度(弧度表示),此时g系与e系坐标轴平行。
e系到g系的坐标转换矩阵只需要将上式转置即可。
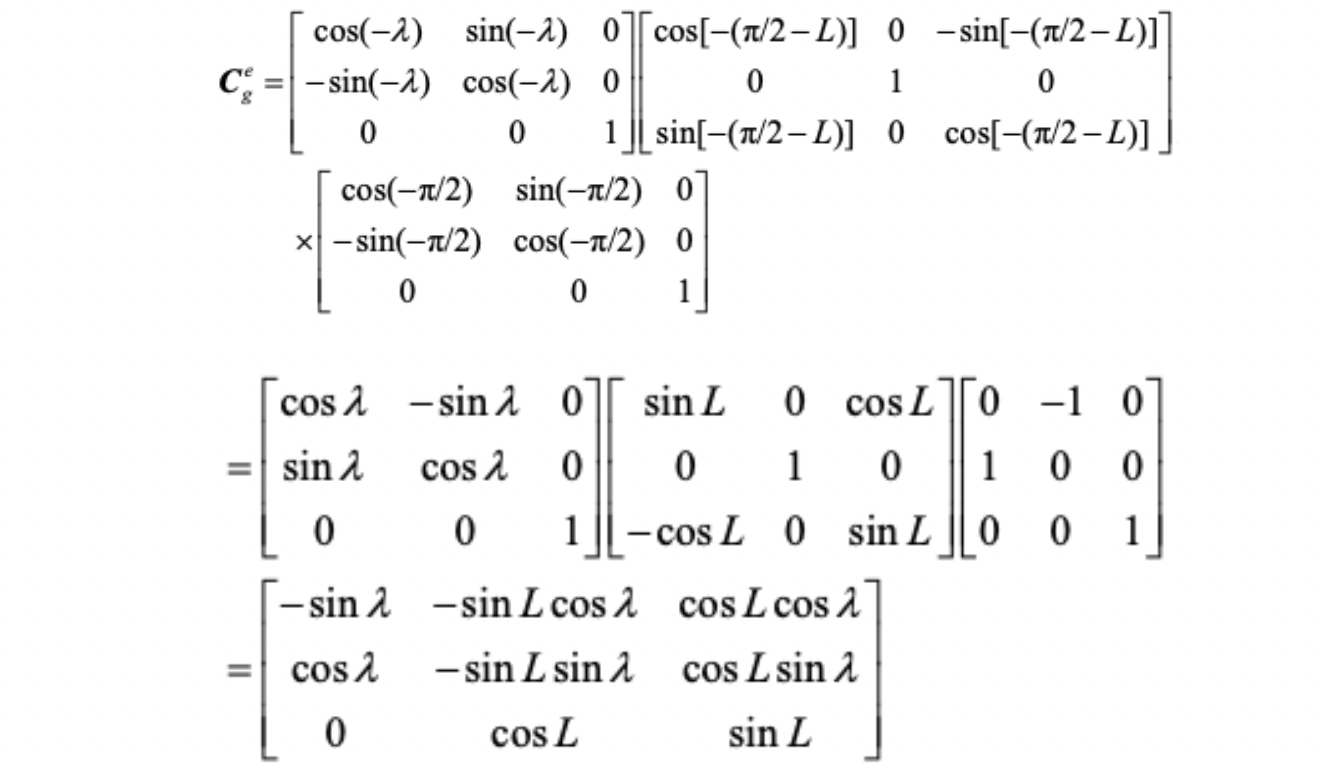
2、g系选取为北东地坐标系
e系转到g系(北东地)的坐标旋转矩阵
C
g
e
C^e_g
Cge 表示如下:(由于常将地理坐标系g作为导航坐标系,因此表示成
C
n
e
C^e_n
Cne是同一个东西 ):

e系到g(n)系的坐标转换矩阵只需要将上式转置即可。
4、当地水平地理坐标系g(n)系<=>载体坐标系b系
1、g(n)系选取为东北天坐标系,b系选择右前上坐标系
欧拉角表达式为:

东北天——右前上坐标系下欧拉角旋转顺序:航向角(绕Z轴)—俯仰角(绕X轴)—横滚角(绕Y轴):
第一个转动角度:航向角(绕Z轴旋转
−
ψ
-\psi
−ψ角)
第二个转动角度:俯仰角(绕X轴旋转
θ
\theta
θ 角)
第三个转动角度:横滚角(绕Y轴旋转
ϕ
\phi
ϕ角)
注意 俯仰角和横滚角:姿态角方向与对应轴向转动方向一致,绕对应轴正转,相应姿态为正,绕对应轴反转,相应姿态为负。航向角:姿态角方向与对应轴向转动方向相反(由于航向角定义为:Y轴指北时,航向角为零。北偏东顺时针依次从0变为360deg。而Z轴指天,Z轴反转时,航向角才依次增大)。
则旋转矩阵为:
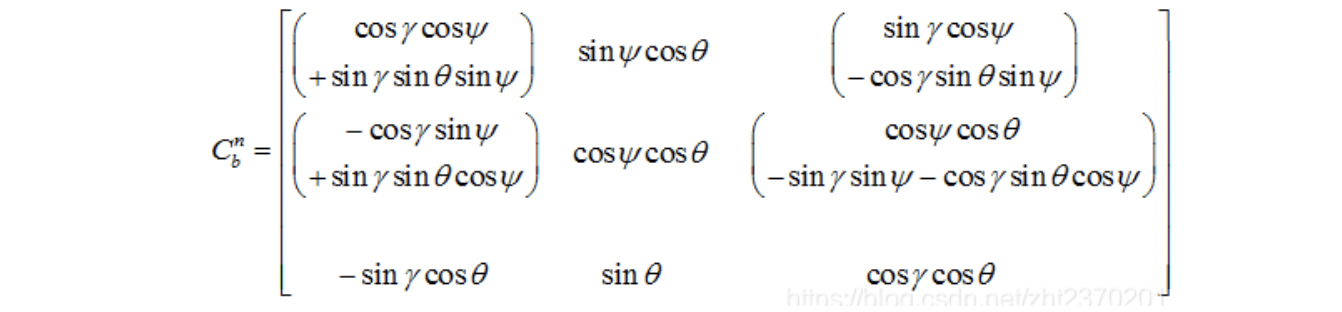
所以姿态矩阵(b系到n系的坐标转换矩阵)为:
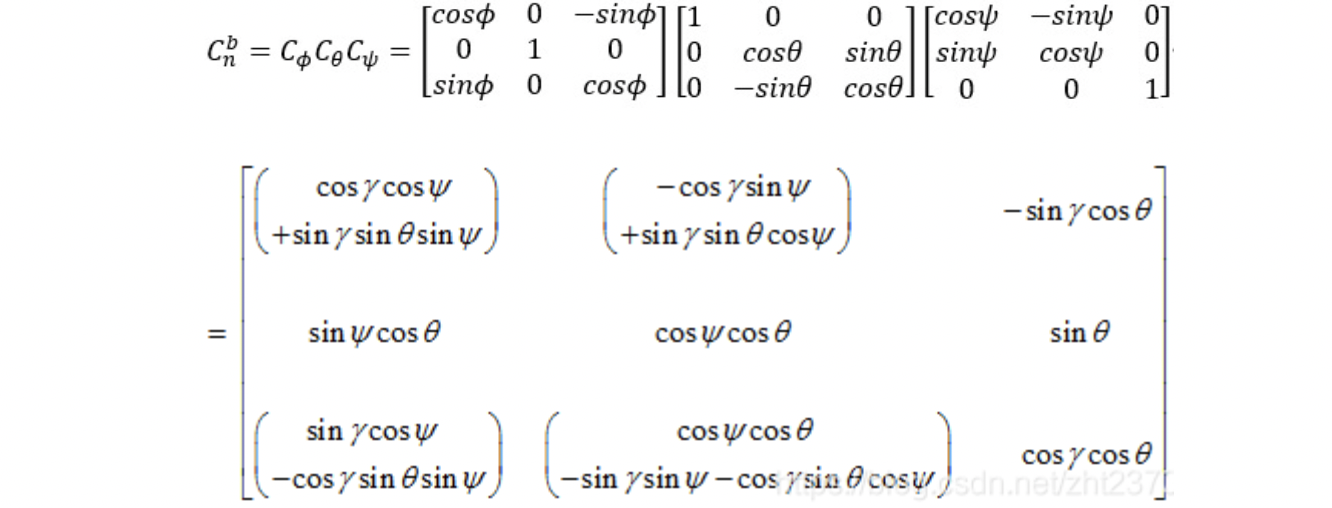
2、g(n)系选取为北东地坐标系,b系选择前右下坐标系
北东地——前右下坐标系下欧拉角旋转顺序:航向角(绕Z轴)—俯仰角(绕Y轴)—横滚角(绕X轴):
第一个转动角度:航向角(绕Z轴旋转
ψ
\psi
ψ角)
第二个转动角度:俯仰角(绕Y轴旋转
θ
\theta
θ 角)
第三个转动角度:横滚角(绕X轴旋转
ϕ
\phi
ϕ角)
注意 俯仰角和横滚角:方向与对应轴向转动方向一致,绕对应轴正转,相应姿态为正;绕对应轴反转,相应姿态为负。X轴指北时,航向角为零。北偏东顺时针依次从0变为360deg
(个人感觉北东地坐标系要比东北天坐标系好用一些,然而国内的大佬秦永元、严恭敏等均用的东北天坐标系,北东地坐标系国外学者用的多一些)。
则旋转矩阵为:
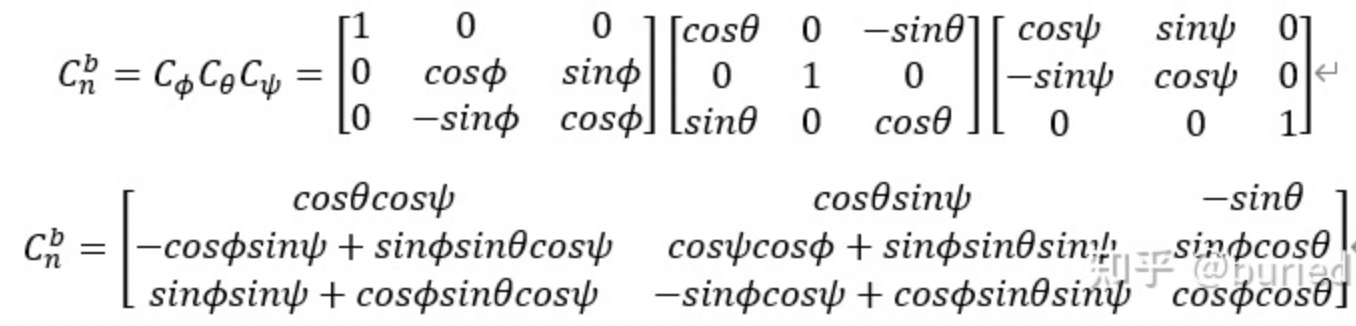
则旋转矩阵为:

最后一定注意欧拉角旋转顺序与定义啊兄弟们,别搞混了,坐标系选取不同定义也不同的!!!!!!

