
- 1MySQL索引的分类及性能分析及问题排查_mysql 索引类型以及效率
- 2STM32CubeMX使用说明_stm32cubemx汉化
- 3Flask配置远程访问_flask 远程访问
- 4Flex debug : Flash player not found_fr_flash:not found
- 5前端与区块链的结合实践:构建去中心化应用_前段区块链
- 6门控循环单元(GRU)_gru门控循环单元
- 7解决elasticsearch报错:FORBIDDEN/12/index read-only / allow delete (api)_es index [ots] blocked by: [forbidden/12/index rea
- 8【转】大数据开发之Spark面试八股文_大数据开发八股文
- 9git强制覆盖本地代码(与git远程仓库保持一致:git reset --hard origin/master)_git用本地覆盖远程
- 10Mac电脑,python+appium+安卓模拟器使用步骤_appium mac
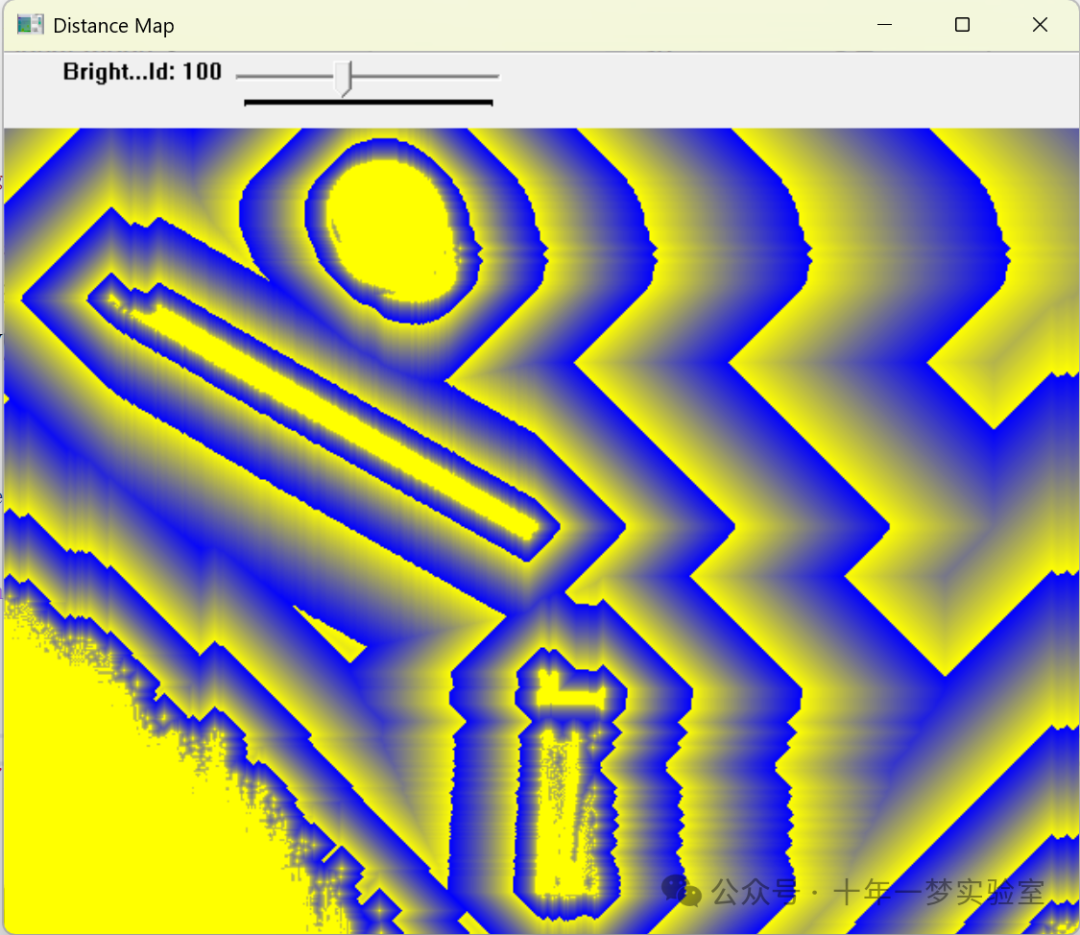
【opencv】示例-distrans.cpp 距离变换
赞
踩

stuff.jpg
- #include <opencv2/core/utility.hpp> // 包含OpenCV中的核心功能支持库
- #include "opencv2/imgproc.hpp" // 包含OpenCV中的图像处理库
- #include "opencv2/imgcodecs.hpp" // 包含OpenCV中的图像编解码库
- #include "opencv2/highgui.hpp" // 包含OpenCV中的高级用户界面库
-
-
- #include <stdio.h> // 包含标准输入输出库
-
-
- using namespace std; // 使用标准命名空间
- using namespace cv; // 使用OpenCV命名空间
-
-
- int maskSize0 = DIST_MASK_5; // 定义默认的掩膜大小为5x5
- int voronoiType = -1; // 定义维诺图模式的初始类型,-1表示未激活维诺图模式
- int edgeThresh = 100; // 边缘检测的阈值
- int distType0 = DIST_L1; // 定义默认的距离变换类型为L1
-
-
- // 输出图像和临时图像
- Mat gray;
-
-
- // 亮度阈值的回调函数
- static void onTrackbar( int, void* )
- {
- static const Scalar colors[] = // 预定义的颜色数组
- {
- Scalar(0,0,0),
- Scalar(255,0,0),
- Scalar(255,128,0),
- Scalar(255,255,0),
- Scalar(0,255,0),
- Scalar(0,128,255),
- Scalar(0,255,255),
- Scalar(0,0,255),
- Scalar(255,0,255)
- };
-
-
- int maskSize = voronoiType >= 0 ? DIST_MASK_5 : maskSize0; // 根据是否启用维诺图模式来选择掩膜大小
- int distType = voronoiType >= 0 ? DIST_L2 : distType0; // 根据是否启用维诺图模式来选择距离变换类型
-
-
- Mat edge = gray >= edgeThresh, dist, labels, dist8u; // 生成边缘图,距离图,标签图和8位显示图
-
-
- // 执行距离变换计算
- if( voronoiType < 0 )
- distanceTransform( edge, dist, distType, maskSize ); // 距离变换操作
- else
- distanceTransform( edge, dist, labels, distType, maskSize, voronoiType ); // 包含标签的距离变换
-
-
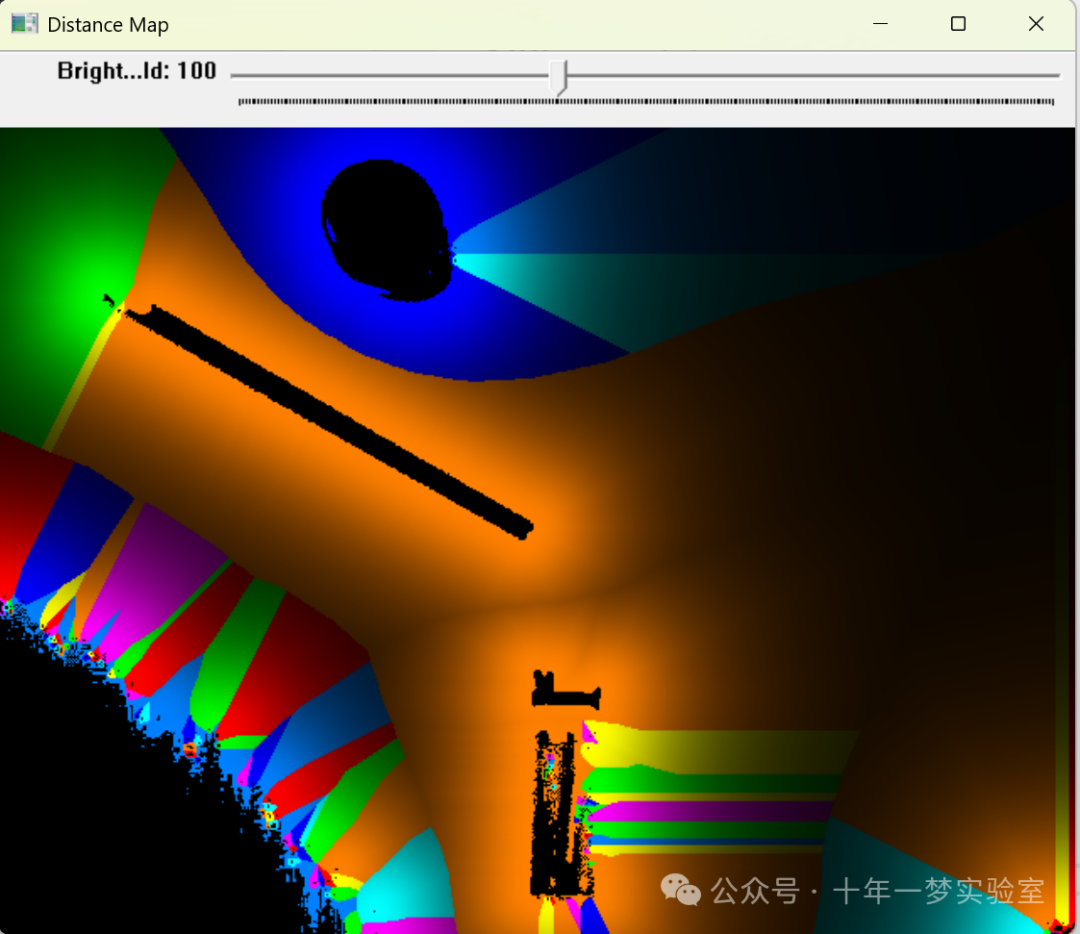
- // 如果没有激活维诺图模式,进行以下处理
- if( voronoiType < 0 )
- {
- // "绘画"距离变换结果的过程开始
- dist *= 5000;
- pow(dist, 0.5, dist); // 对距离变换结果取平方根以获得较好的显示效果
-
-
- Mat dist32s, dist8u1, dist8u2; // 用于转换数据类型的中间Mat变量
-
-
- dist.convertTo(dist32s, CV_32S, 1, 0.5); // 转换数据类型
- dist32s &= Scalar::all(255); // 将数值截断到[0, 255]范围内
-
-
- dist32s.convertTo(dist8u1, CV_8U, 1, 0); // 转换数据类型到8位无符号整型
- dist32s *= -1; // 取反
-
-
- dist32s += Scalar::all(255); // 增加255以避免负数值
- dist32s.convertTo(dist8u2, CV_8U); // 再次转换数据类型
-
-
- Mat planes[] = {dist8u1, dist8u2, dist8u2}; // 创建用于合并的平面数组
- merge(planes, 3, dist8u); // 合并三个平面成为一个3通道图像
- }
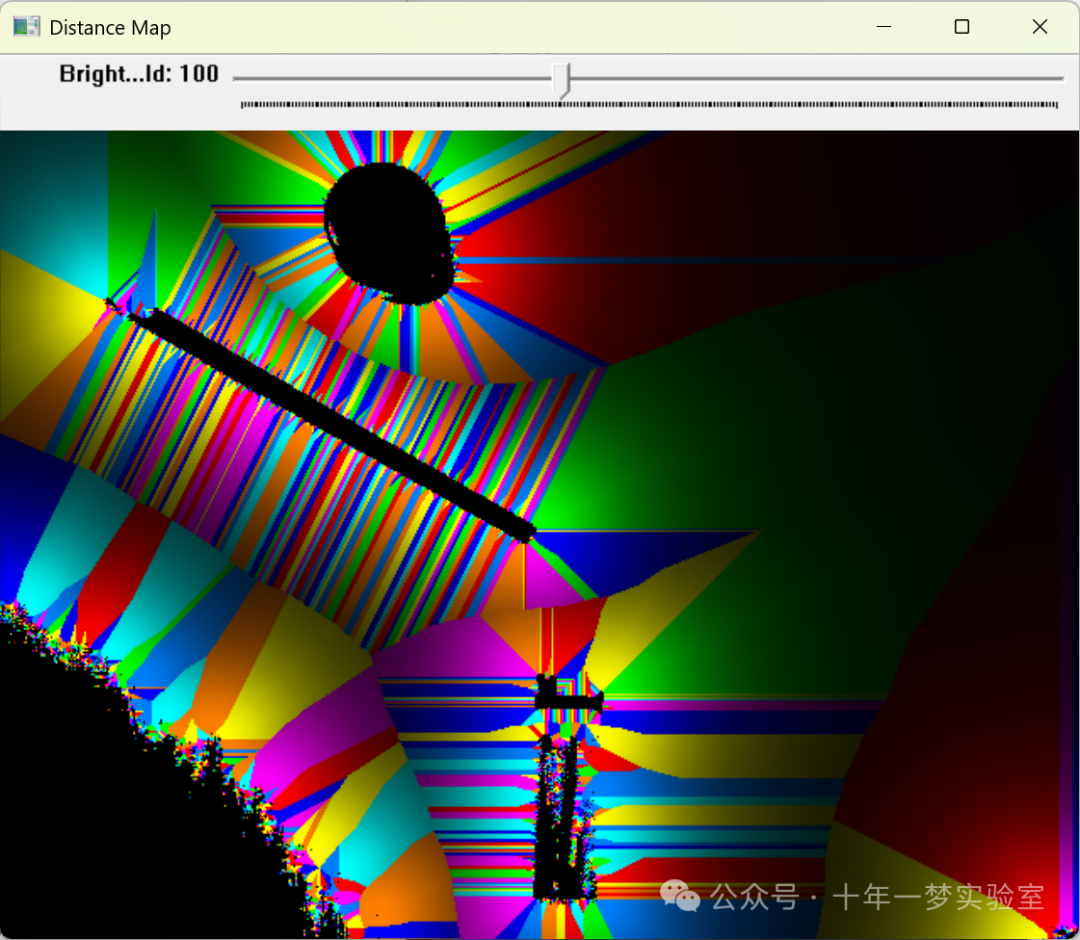
- // 如果激活了维诺图模式,进行以下处理
- else
- {
- dist8u.create(labels.size(), CV_8UC3); // 创建用于显示的8位3通道图像
- // 遍历图像中的所有像素
- for( int i = 0; i < labels.rows; i++ )
- { //获取第i行的指针,并将其转换为指向int类型的指针。这样,ll就是指向labels图像第i行数据的指针,labels图像包含了沃罗诺伊图的标签信息。
- const int* ll = (const int*)labels.ptr(i);
- const float* dd = (const float*)dist.ptr(i);//获取dist图像第i行的指针,并将其转换为指向float类型的指针。dist图像包含了每个像素到最近的零像素点的距离
- uchar* d = (uchar*)dist8u.ptr(i);//获取输出图像(假设是dist8u)第i行的指针,并将其转换为指向uchar类型的指针。这里的dist8u是一个三通道的8位无符号整型图像,它将会被用来显示沃罗诺伊图及其颜色化的距离映射。
- for( int j = 0; j < labels.cols; j++ )
- {
- int idx = ll[j] == 0 || dd[j] == 0 ? 0 : (ll[j]-1)%8 + 1; // 计算颜色索引
- float scale = 1.f/(1 + dd[j]*dd[j]*0.0004f); // 根据距离计算颜色缩放因子
- int b = cvRound(colors[idx][0]*scale); // 计算蓝色分量
- int g = cvRound(colors[idx][1]*scale); // 计算绿色分量
- int r = cvRound(colors[idx][2]*scale); // 计算红色分量
- d[j*3] = (uchar)b; // 设置蓝色分量
- d[j*3+1] = (uchar)g; // 设置绿色分量
- d[j*3+2] = (uchar)r; // 设置红色分量
- }
- }
- }
-
-
- imshow("Distance Map", dist8u ); // 显示距离图
- }
-
-
- // 辅助输出函数,主要用于输出帮助信息
- static void help(const char** argv)
- {
- printf("\n本程序用于演示利用距离变换函数处理边缘图像之间的关系。\n"
- "用法:\n"
- "%s [image_name -- 默认图片为stuff.jpg]\n"
- "\n快捷键:\n"
- "\tESC - 退出程序\n"
- "\tC - 使用C/Inf度量\n"
- "\tL1 - 使用L1度量\n"
- "\tL2 - 使用L2度量\n"
- "\t3 - 使用3x3掩码\n"
- "\t5 - 使用5x5掩码\n"
- "\t0 - 使用精确距离变换\n"
- "\tv - 切换到Voronoi图模式\n"
- "\tp - 切换到基于像素的Voronoi图模式\n"
- "\tSPACE - 遍历所有的模式\n\n", argv[0]);
- }
-
-
- const char* keys =
- {
- "{help h||}{@image |stuff.jpg|input image file}"
- };
-
-
- int main( int argc, const char** argv )
- {
- CommandLineParser parser(argc, argv, keys); // 使用命令行解析器来处理输入参数
- help(argv); // 显示帮助信息
- if (parser.has("help")) // 如果命令行包含帮助标志(例如-h或--help)
- return 0; // 返回0并退出,不执行接下来的代码
- string filename = parser.get<string>(0); // 获取命令行中的第一个参数,通常是输入图像的文件名
- gray = imread(samples::findFile(filename), 0); // 读取输入的图像,并转换为灰度图
- if(gray.empty()) // 判断读取的图像是否为空
- {
- printf("无法读取图像文件:%s\n", filename.c_str()); // 如果为空,打印错误信息
- help(argv); // 再次显示帮助信息
- return -1; // 返回-1表示错误退出
- }
-
-
- namedWindow("Distance Map", 1); // 创建一个名为"Distance Map"的窗口
- createTrackbar("Brightness Threshold", "Distance Map", &edgeThresh, 255, onTrackbar, 0); // 创建一个调整‘亮度阀值’的trackbar
-
-
- for(;;) // 创建一个无限循环
- {
- onTrackbar(0, 0); // 调用回调函数,更新显示的视图
-
-
- char c = (char)waitKey(0); // 等待用户按键
-
-
- if( c == 27 ) // 如果按下ESC键(键码27)
- break; // 退出循环
-
-
- if( c == 'c' || c == 'C' || c == '1' || c == '2' || // 根据按键设置相关参数
- c == '3' || c == '5' || c == '0' )
- voronoiType = -1; // 重置voronoiType
-
-
- if( c == 'c' || c == 'C' )
- distType0 = DIST_C; // 设置距离变换为C类型
- else if( c == '1' )
- distType0 = DIST_L1; // 设置距离变换为L1类型
- else if( c == '2' )
- distType0 = DIST_L2; // 设置距离变换为L2类型
- else if( c == '3' )
- maskSize0 = DIST_MASK_3; // 设置掩码大小为3x3
- else if( c == '5' )
- maskSize0 = DIST_MASK_5; // 设置掩码大小为5x5
- else if( c == '0' )
- maskSize0 = DIST_MASK_PRECISE; // 设置掩码大小为精确模式
- else if( c == 'v' )
- voronoiType = 0; // 切换到Voronoi图模式
- else if( c == 'p' )
- voronoiType = 1; // 切换到基于像素的Voronoi图模式
- else if( c == ' ' ) // 当用户按下空格键时
- {
- if( voronoiType == 0 ) // 如果当前是Voronoi图模式(基于标签)
- voronoiType = 1; // 切换到pixel-based Voronoi diagram mode(像素级)
- else if( voronoiType == 1 ) // 如果当前是像素级的Voronoi图模式
- {
- voronoiType = -1; // 关闭Voronoi图模式
- maskSize0 = DIST_MASK_3; // 重置掩码大小为3x3
- distType0 = DIST_C; // 重置距离类型为C/Inf度量
- }
- else if( distType0 == DIST_C ) // 如果当前距离类型为C/Inf度量
- distType0 = DIST_L1; // 切换到L1度量
- else if( distType0 == DIST_L1 ) // 如果当前距离类型为L1度量
- distType0 = DIST_L2; // 切换到L2度量
- else if( maskSize0 == DIST_MASK_3 ) // 如果当前掩码大小为3x3
- maskSize0 = DIST_MASK_5; // 切换到5x5掩码大小
- else if( maskSize0 == DIST_MASK_5 ) // 如果当前掩码大小为5x5
- maskSize0 = DIST_MASK_PRECISE; // 切换到精确的距离变换
- else if( maskSize0 == DIST_MASK_PRECISE ) // 如果当前是精确的距离变换
- voronoiType = 0; // 开启Voronoi图模式(基于标签)
- }
- }
- return 0; // 程序正常退出
- }

这段代码是一个使用OpenCV库函数,实现了基于距离变换的图像边缘检测,并由用户输入不同键值来调节距离度量方式、掩码大小及是否进入Voronoi图模式的C++程序示例。程序的主体会根据用户输入的图像文件,展示并允许用户通过交互式的方式(例如调节阈值的trackbar),来实时观察不同算法参数下的距离变换结果。程序还支持展示Voronoi图,用户可以通过键盘输入控制变换参数,探索对图像处理的影响。
distanceTransform( edge, dist, distType, maskSize );
distanceTransform( edge, dist, labels, distType, maskSize, voronoiType );
v
p
这段代码是一个OpenCV的示例程序,演示了如何使用距离变换函数(distance transform)在边缘图像之间的应用。
全局变量:
maskSize0: 用于调整掩码大小,初始设置为DIST_MASK_5。voronoiType: 用于切换绘制沃罗诺伊图,初始值为 -1,表示未激活该模式。edgeThresh: 边缘阈值,默认为100。distType0: 距离类型,默认是DIST_L1。gray: 一个Mat对象,用来存储灰度图像。
主要函数:
解析命令行参数,加载灰度图像。
创建一个显示距离映射的窗口和对应的滑动条。
进入一个无限循环,监听按键事件以改变距离变换的参数或是退出程序。
首先根据是否在沃罗诺伊模式下设置距离类型和掩码大小。
使用
distanceTransform函数计算边缘图像的距离变换。如果不是沃罗诺伊模式,则对结果进行渲染并显示在窗口中。
如果是沃罗诺伊模式,则根据距离和标签值对颜色进行缩放,以绘制沃罗诺伊图。
onTrackbar: 这个回调函数会响应滑动条变化,它计算边缘图像的距离变换,并将结果绘制在窗口中。help: 显示帮助信息,列出了程序的用法和键盘操作指南。main: 程序的主入口。
按键指南包括对距离计算方法(C/Inf、L1、L2)、掩码大小(3x3、5x5)、距离变换精确度以及绘制沃罗诺伊图模式的切换支持。输入图片名称可以通过命令行参数提供,如果未提供参数则默认使用 "stuff.jpg" 图片。
整体来说,这个程序可以让用户通过改变参数来探索不同的距离度量和掩码对距离变换效果的影响,以及如何生成沃罗诺伊图。

