STM32控制步进推杆电机通过精准控制脉冲进行复位_微型推杆电机控制电路
赞
踩
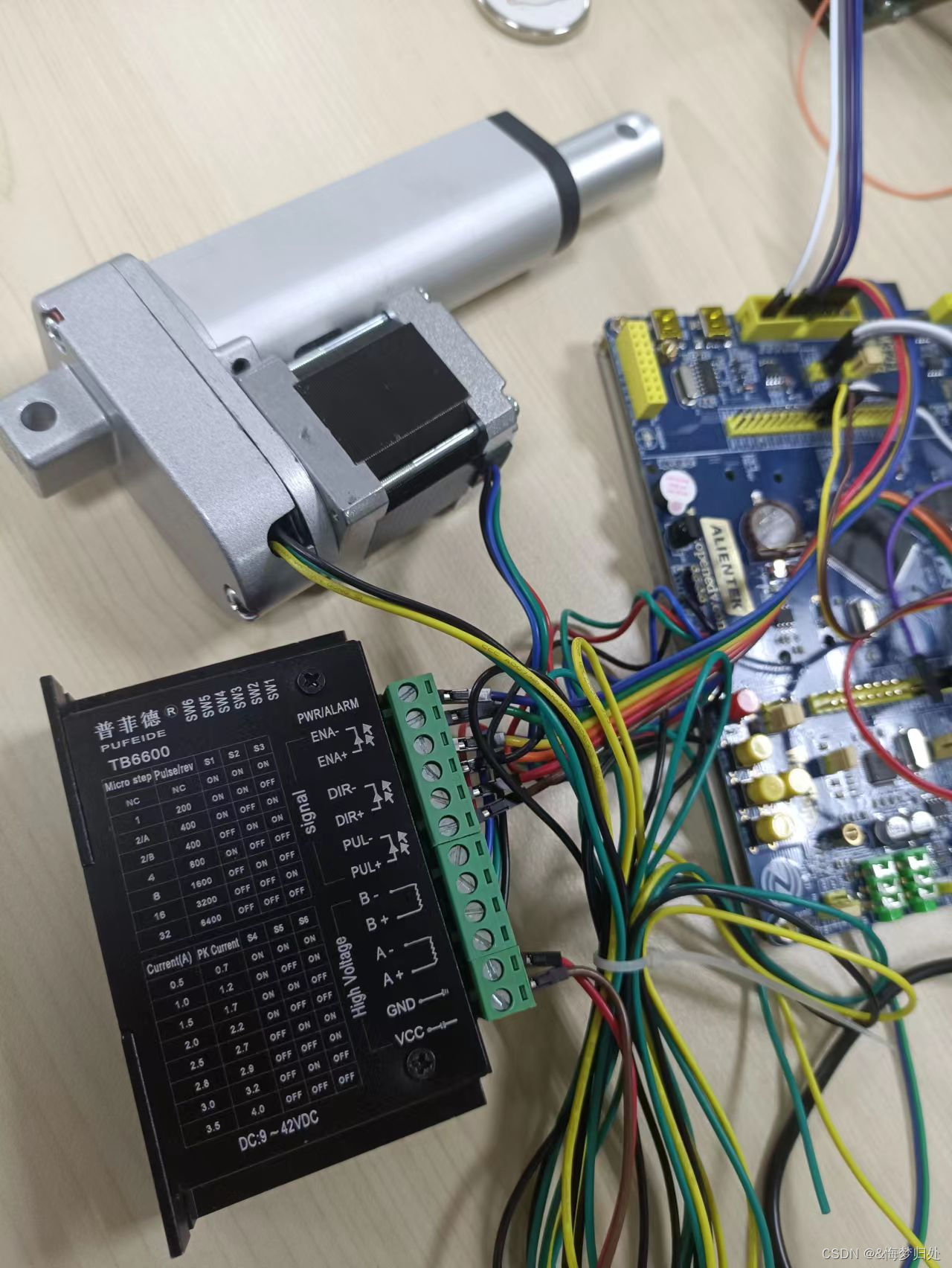
1、TB6600升级版驱动器
TB6600升级版驱动器是一款专业的两相混合式步进电机驱动器,其驱动电流电流在3.5A及以下,而我所用的步进电机刚好是两相混合式步进电机,刚好符合。其接线方式我是按照共阴极接法:

所以呢,当ENA=0时,电机启动,ENA=1时,电机停止;
当DIR=0时,电机正向转动,DIR=1时,电机反向转动;
2、定时器配置PWM输出模式,以及更新中断
- void TIM3_PWM_Init(u16 arr,u16 psc)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
-
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
-
-
- //输出TIM3 CH2的PWM脉冲波形 GPIOA.7
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //TIM_CH2
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
-
- //输出TIM3 CH2的PWM脉冲波形 GPIOA.6
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //TIM_CH1
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
-
- //初始化TIM3
- TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
- TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
- TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
-
- //初始化TIM3 Channel2 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
- TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
-
- //初始化TIM3 Channel1 PWM模式
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
- TIM_OC1Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC1
-
- TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
- TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR1上的预装载寄存器
-
- TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
-
- NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
- NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
-
- TIM_Cmd(TIM3, DISABLE); //使能TIM3
-
-
- }
3、定义中断服务函数以及脉冲处理
- u32 pulse_P=0;
- u32 pulse_N=0;
- void TIM3_IRQHandler(void) //TIM3中断
- {
- if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
- {
- TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
-
- if(DIR1)
- {
- pulse_N++;
- }
- else pulse_P++;
-
- LED0=0;
- }
- }
定义pulse_N变量,当反向转动时候,pulse_N递增;
定义pulse_P变量,当正向转动时候,pulse_P递增;
总结:相当于定于正转反转的脉冲
- extern u32 pulse_N;
- extern u32 pulse_P;
- int pulse_count=0;
- TIM3_PWM_Init(899,12); //不分频。PWM频率=72000000/900=80Khz
- TIM_SetCompare2(TIM3,450);
- TIM_SetCompare1(TIM3,450);
- //串口屏的控件指令,通过串口屏控制推杆进行复位
- if(USART_RX_BUF[0]==0x11&&USART_RX_BUF[1]==0x12)//推杆复位
- {
- TIM_Cmd(TIM3, DISABLE);
- pulse_count=pulse_P-pulse_N;
- pulse_N=0;pulse_P=0;
- flag_R=1;
- USART_RX_STA=0; //清除标志位
- }
-
- //控制逻辑
- if(flag_R)
- {
- if(pulse_count>0)
- {
- TIM_Cmd(TIM3, ENABLE);
- ENA1=0;
- DIR1=1;
- if(pulse_N>pulse_count)
- {
- TIM_Cmd(TIM3, DISABLE);
- ENA1=1;//步进电机1停止
- }
- }
- else
- {
- pulse_count=0-pulse_count;
- TIM_Cmd(TIM3, ENABLE);
- ENA1=0;
- DIR1=0;
- if(pulse_P>pulse_count)
- {
- TIM_Cmd(TIM3, DISABLE);
- ENA1=1;//步进电机1停止
- }
- }
- }
控制逻辑:串口屏发出推杆复位指令:1、停止脉冲的输出;
2、计算正转反转脉冲的差值,并将其赋给pulse_count;
3、对之前记录正转、反转脉冲清零,这样才方便下次的记录以及复位操作;
4、给出一个推杆复位操作标签;
推杆复位的具体操作 :我以逻辑框图展示比较清晰明了,配合上面的代码就可以用了。

使用提醒: 1、使用完复位Function后,需将flag_R标签值改为0,不然他就一直处于复位模式
2、该编制思路并没有考虑细分等情况,因为我实现的是对原始初始位置的还原,并不需要,我只需要计算出它相对原始位置的脉冲差值,再以相反的方向相同的脉冲数驱动即可。
实图