
- 1bert 文本分类实战_bert实战
- 2聊聊自动驾驶中的路径和轨迹
- 3C++——探索智能指针的设计原理_c++智能指针原理 csdn
- 4笔记:线性模型:线性回归简介和线性回归中的损失函数_线性回归损失函数
- 5python算法中的图算法之网络流算法(详解二)_python网络流模型
- 6推荐开源项目:TimerView —— 简单易用的Android计时器视图库
- 7【JavaSE】String常用操作_string = 操作
- 8瑞星U盘杀毒工具制作! 实验完全正确。
- 9数据库管理工具:如何使用 Navicat Premium 转储(导出)和运行(导入)*.sql 文件?_navicat怎么打开.sql文件
- 10android sdk更新的腾讯代理地址_android sdk代理腾讯源
【VSCode】【nano】使用小技巧_nano删除一行
赞
踩
一、VSCode使用笔记
1、VSCode快捷键
Ctrl + Shift + K //删除一行代码
Ctrl + Shift + 上下箭头 //上下移动整行代码的位置
Ctrl + / //注释一行代码、取消注释一行代码 (在VSCode环境下,对任何编程语言都适用)
Ctl + ~ //调出/关闭 Vscode自带的终端
2、VSCode代码对比
作用:
①比较代码的前后版本。
②对比例程能跑通的代码与自己敲的跑不通的代码。按着例程敲的代码怎么也跑不通,输出的日志也无法定位到错误,这时代码对比功能就 显得尤为重要了,可以止汗,别问我怎么知道的。
步骤:
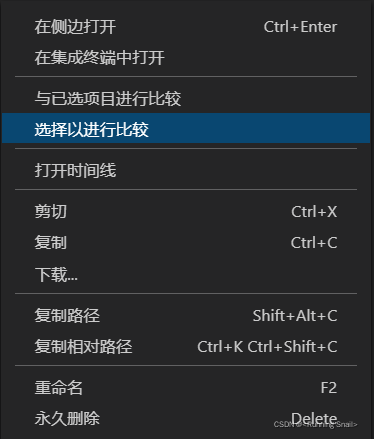
①右键“资源管理器”中的文件,<选择以进行比较>
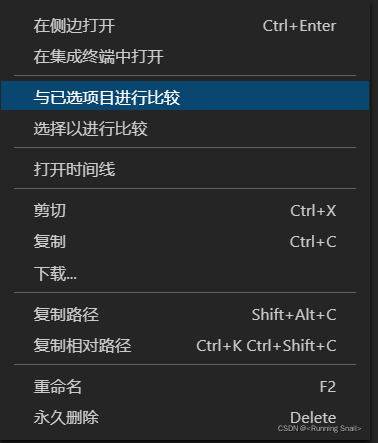
②右键“资源管理器”中的待比较文件,<与已选项目进行比较>
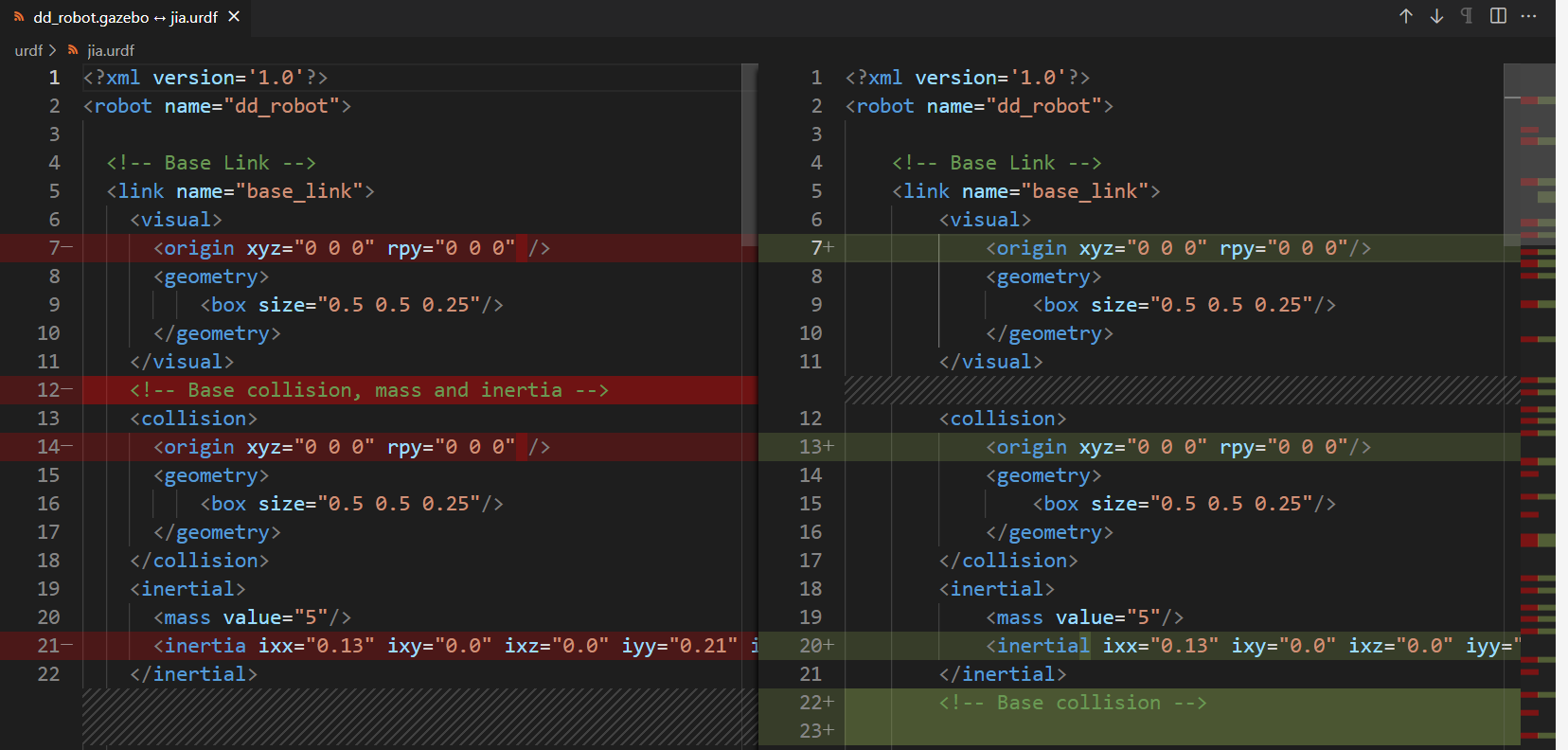
③效果
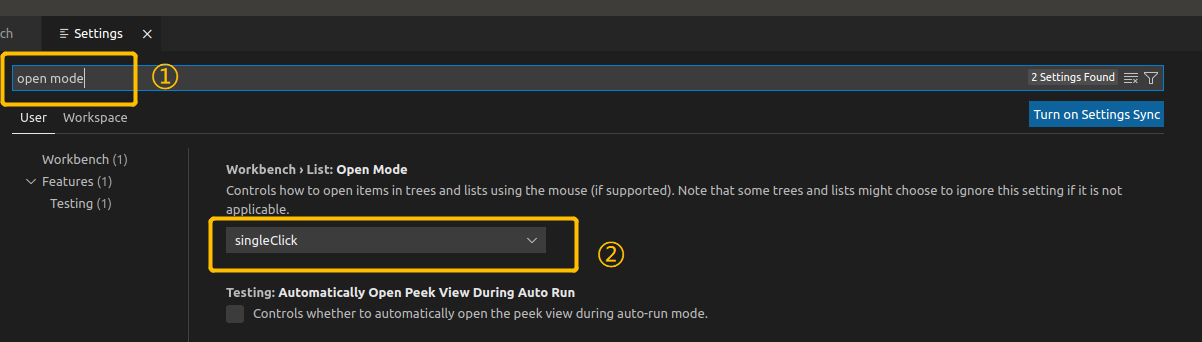
3、VSCode 解除“单击文件就打开”的弊病
① 单击左下角的设置按钮
②选择 Settings
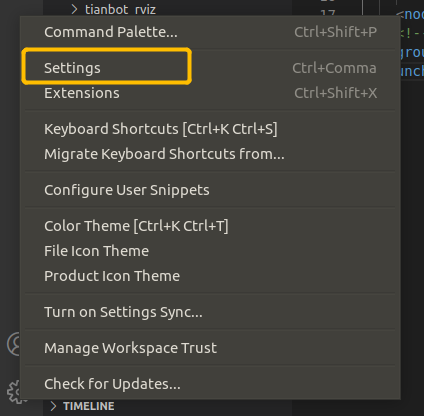
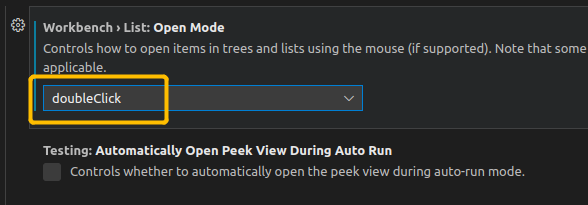
③ 将 singleClick 改为 doubleClick 就搞定了
4、刚下载的新鲜的 VSCode 打开 c++ 工程时,右键没有“跳转到定义”
装上这个插件就解决了:
5、VSCode 装了 C/C++ 插件,又会报错:找不到 ros/ros.h头文件
现象:
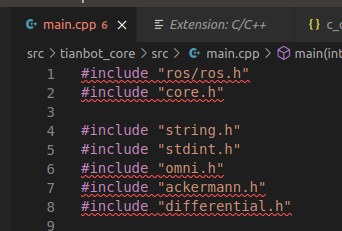
解决办法:
将 ros 头文件的路径包含在 VSCode 的配置文件
{}c_cpp_properties.json中
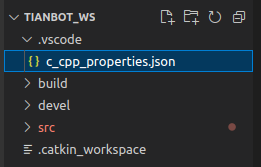
{}c_cpp_properties.json文件所在路径(如何打开此文件):
VSCode 会给打开的顶层文件夹配一个.vscode的隐藏文件夹,{}c_cpp_properties.json就在这个文件夹中。
ros 头文件的路径:
/opt/ros/melodic/include
修改前的配置文件:
{ "configurations": [ { "name": "Linux", "includePath": [ "${workspaceFolder}/**" ], "defines": [], "compilerPath": "/usr/bin/gcc", "cStandard": "c11", "cppStandard": "gnu++14", "intelliSenseMode": "linux-gcc-x64" } ], "version": 4 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
修改后的配置文件:只是添了第 6 行,就能解决ros/ros.h头文件包含报错的问题
{ "configurations": [ { "name": "Linux", "includePath": [ "/opt/ros/melodic/include", "${workspaceFolder}/**" ], "defines": [], "compilerPath": "/usr/bin/gcc", "cStandard": "c11", "cppStandard": "gnu++14", "intelliSenseMode": "linux-gcc-x64" } ], "version": 4 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
注:还看到有人建议在 VSCode 装一下 ROS 插件,但是我现在不报错了,也没打算把 VSCode 用成 IDE,所以就暂且不装 ROS 插件。能精简就精简,尽量所有变量自己可控。
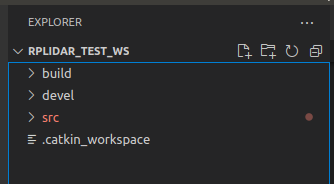
6、VSCode 如何调出 {}c_cpp_properties.json配置文件
在RPLidar_test_ws文件夹工作目录下使用code .打开文件夹时,VSCode 左边工作空间的状态如下,可见是没有.vscode文件夹的,更不用说.vscode文件夹中的配置文件了。
按住 Crtl + Shift + P 快捷键,然后输入 edit configurations,点击选择后缀为(JSON)的那项。

此时VSCode 左边工作空间下出现:
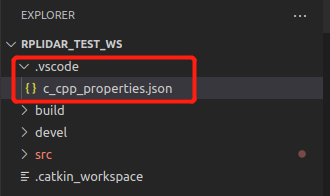
能够调出{}c_cpp_properties.json文件,就可以着手进行{}c_cpp_properties.json文件的配置了。
二、nano使用笔记
1、nano快捷键
Alt + / //定位到文件最后一行
Alt + \ //定位到文件首行


