
- 1Pod 中的健康检查liveness,readiness,startupProbe_liveness 容器中是什么意思
- 2MPAndroidChart 绘制 饼状图、柱状图和折线图简单汇总_mpandroidchart 各种类型饼状图 tobarchart
- 3Enctype=multipart/form-data 有什么用?_enctype multipart form data
- 4盘点时下最流行的十大编程语言优缺点,附2024年1月最新的编程语言排行榜单_2024编程语言排行榜
- 5【附安装包】3ds Max2023安装教程_3dmax2023
- 6【运维】Linux安装GeoIP,报错Transaction check error、各种问题解决_rocky linux如何安装geoip
- 7yolov5单目相机测距实现_yolov5测距 单目
- 8已知深度图,获得某个像素点的三维坐标_像素坐标 根据深度信息 得到 3维点
- 9MySQL的索引_mysql索引
- 10html5中自适应代码,html5 屏幕自适应代码
用鸿蒙开发AI应用(五)HDF 驱动补光灯
赞
踩

前言
上一篇,我们在鸿蒙上运行了第一个程序,这一篇我们来编写一个驱动开启摄像头的红外补光灯,顺便熟悉一下鸿蒙上的 HDF 驱动开发。

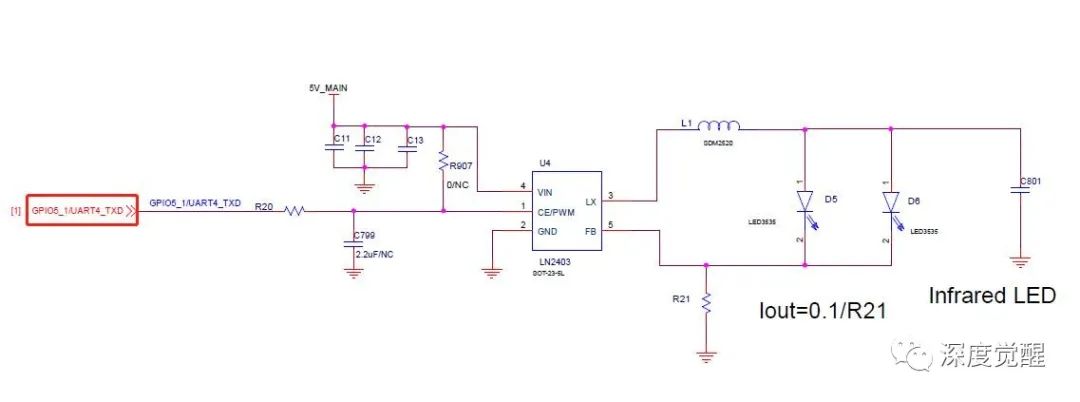
硬件准备
先查一下原理图(具体可参考第一篇的硬件资料),找到红外灯的 IO 口编号,GPIO5_1。
HDF 驱动开发
1. 简介
HDF(OpenHarmony Driver Foundation)驱动框架,为驱动开发者提供驱动框架能力,包括驱动加载、驱动服务管理和驱动消息机制。旨在构建统一的驱动架构平台,为驱动开发者提供更精准、更高效的开发环境,力求做到一次开发,多系统部署。
HDF框架以组件化的驱动模型作为核心设计思路,为开发者提供更精细化的驱动管理,让驱动开发和部署更加规范。HDF框架将一类设备驱动放在同一个host里面,驱动内部实现开发者也可以将驱动功能分层独立开发和部署,支持一个驱动多个node,HDF框架管理驱动模型如下图所示:
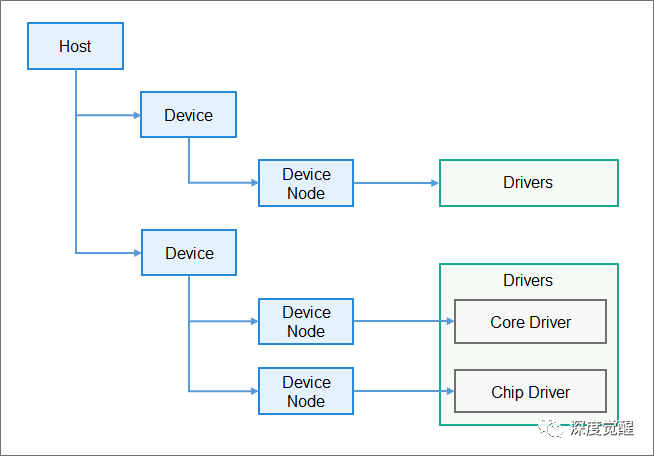
2. 驱动框架
2.1 驱动框架实现
在 huawei/hdf 目录下新建一个文件夹 led, 然后在其中新建一个源文件 led.c。
- #include "hdf_device_desc.h" // HDF框架对驱动开放相关能力接口的头文件
- #include "hdf_log.h" // HDF 框架提供的日志接口头文件
-
- #define HDF_LOG_TAG led_driver // 打印日志所包含的标签,如果不定义则用默认定义的HDF_TAG标签
-
- //驱动对外提供的服务能力,将相关的服务接口绑定到HDF框架
- int32_t HdfLedDriverBind(struct HdfDeviceObject *deviceObject)
- {
- HDF_LOGD("Led driver bind success");
- return 0;
- }
-
- // 驱动自身业务初始的接口
- int32_t HdfLedDriverInit(struct HdfDeviceObject *deviceObject)
- {
- if (deviceObject == NULL) {
- HDF_LOGE("Led driver Init failed!");
- return HDF_ERR_INVALID_OBJECT;
- }
- HDF_LOGD("Led driver Init success");
- return HDF_SUCCESS;
- }
-
- // 驱动资源释放的接口
- void HdfLedDriverRelease(struct HdfDeviceObject *deviceObject)
- {
- if (deviceObject == NULL) {
- HDF_LOGE("Led driver release failed!");
- return;
- }
-
- HDF_LOGD("Led driver release success");
- return;
- }

2.2 驱动入口注册到HDF框架
- // 定义驱动入口的对象,必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量
- struct HdfDriverEntry g_ledDriverEntry = {
- .moduleVersion = 1,
- .moduleName = "led_driver",
- .Bind = HdfLedDriverBind,
- .Init = HdfLedDriverInit,
- .Release = HdfLedDriverRelease,
- };
-
- // 调用HDF_INIT将驱动入口注册到HDF框架中,在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动,当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
- HDF_INIT(g_ledDriverEntry);
3. 驱动编译
在 huawei/hdf/led 目录下新建编译文件 Makefile
- include $(LITEOSTOPDIR)/../../drivers/hdf/lite/lite.mk #导入hdf预定义内容,必需
-
- MODULE_NAME := hdf_led_driver #生成的结果文件
- LOCAL_SRCS += led.c #本驱动的源代码文件
- LOCAL_INCLUDE := ./include #本驱动的头文件目录
- LOCAL_CFLAGS += -fstack-protector-strong -Wextra -Wall -Werror #自定义的编译选项
- include $(HDF_DRIVER) #导入模板makefile完成编译
这里的hdf_led_driver为驱动文件名,注意对应关系。
4. 编译结果链接到内核镜像
修改 huawei/hdf/hdf_vendor.mk 文件,添加以下代码
- LITEOS_BASELIB += -lhdf_led_driver #链接生成的静态库
- LIB_SUBDIRS += $(VENDOR_HDF_DRIVERS_ROOT)/led #驱动代码Makefile的目录
填入驱动文件名和源码路径。
5. 驱动配置
驱动配置包含两部分,HDF框架定义的驱动设备描述和驱动的私有配置信息。
5.1 驱动设备描述(必选)
HDF框架加载驱动所需要的信息来源于HDF框架定义的驱动设备描述。
修改 vendor/hisi/hi35xx/hi3516dv300/config/device_info/device_info.hcs配置文件,添加驱动的设备描述。
- platform :: host {
- hostName = "platform_host"; // host名称,host节点是用来存放某一类驱动的容器
- priority = 50; // host启动优先级(0-200),值越大优先级越低,建议默认配100,优先级相同则不保证host的加载顺序
-
- device_led :: device { // led设备节点
- device0 :: deviceNode { // led驱动的DeviceNode节点
- policy = 2; // policy字段是驱动服务发布的策略,在驱动服务管理章节有详细介绍
- priority = 100; // 驱动启动优先级(0-200),值越大优先级越低,建议默认配100,优先级相同则不保证device的加载顺序
- preload = 0; // 驱动按需加载字段
- permission = 0664; // 驱动创建设备节点权限
- moduleName = "led_driver"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
- serviceName = "led_service"; // 驱动对外发布服务的名称,必须唯一
- deviceMatchAttr = "led_config"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等
- }
- }
其中,moduleName、serviceName和deviceMatchAttr 都比较重要,分布链接到源码的不同位置,我这里都分开命名,便于理解。
5.2 驱动私有配置信息(可选)
如果驱动有私有配置,则可以添加一个驱动的配置文件,用来填写一些驱动的默认配置信息,HDF框架在加载驱动的时候,会将对应的配置信息获取并保存在HdfDeviceObject 中的property里面,通过Bind和Init(参考驱动开发)传递给驱动。
在 vendor/hisi/hi35xx/hi3516dv300/config/ 目录下新建一个文件夹 led, 然后在其中新建一个源文件 led_config.hcs, 填入以下代码。
- root {
- LedDriverConfig {
- led_version = 1;
- match_attr = "led_config"; //该字段的值必须和device_info.hcs中的deviceMatchAttr值一致
- }
- }
配置信息定义之后,需要将该配置文件添加到板级配置入口文件hdf.hcs。
5.3 板级配置(可选)
修改 vendor/hisi/hi35xx/hi3516dv300/config/hdf.hcs文件,添加代码
- #include "device_info/device_info.hcs"
- #include "led/led_config.hcs"
6. 驱动消息机制管理
当用户态应用和内核态驱动需要交互时,可以使用HDF框架的消息机制来实现。用消息管理可以在用户态和内核态之间架起桥梁,这为我们之后的APP提供了操控底层设备功能的能力。
这里我们在用户态实现一个简单的消息机制,内核态接受到消息后,翻转摄像头两侧的红外补光灯。
6.1 配置服务策略
HDF框架定了驱动对外发布服务的策略,是由配置文件中的policy字段来控制。
- typedef enum {
- /* 驱动不提供服务 */
- SERVICE_POLICY_NONE = 0,
- /* 驱动对内核态发布服务 */
- SERVICE_POLICY_PUBLIC = 1,
- /* 驱动对内核态和用户态都发布服务 */
- SERVICE_POLICY_CAPACITY = 2,
- /* 驱动服务不对外发布服务,但可以被订阅 */
- SERVICE_POLICY_FRIENDLY = 3,
- /* 驱动私有服务不对外发布服务,也不能被订阅 */
- SERVICE_POLICY_PRIVATE = 4,
- /* 错误的服务策略 */
- SERVICE_POLICY_INVALID
- } ServicePolicy;
我们将驱动配置信息中服务策略policy字段设置为2,在之前的设备描述文件device_info.hcs里已经配置好了。
6.2 实现服务
在第2章,我们实现了一个空的驱动框架,现在继续实现内核态的消息服务接口。
编辑 huawei/hdf/led/led.c, 实现服务基类成员IDeviceIoService中的Dispatch方法。收到用户态发来的命令后,操作LED设备,然后将返回值通过reply传回,最后再将收到的命令回传给用户态程序。
- // Dispatch是用来处理用户态发下来的消息
- int32_t LedDriverDispatch(struct HdfDeviceIoClient *client, int cmdCode, struct HdfSBuf *data, struct HdfSBuf *reply)
- {
- int32_t result = HDF_FAILURE;
- HDF_LOGE("Led driver dispatch");
- if (client == NULL || client->device == NULL)
- {
- HDF_LOGE("Led driver device is NULL");
- return HDF_ERR_INVALID_OBJECT;
- }
-
- switch (cmdCode)
- {
- case LED_WRITE_READ:
- const char *recv = HdfSbufReadString(data);
- if (recv != NULL)
- {
- HDF_LOGI("recv: %s", recv);
- result = CtlLED(-1); # 操作设备
- // CtlLED(GPIO_VAL_HIGH);
- if (!HdfSbufWriteInt32(reply, result))
- {
- HDF_LOGE("replay is fail");
- }
- return HdfDeviceSendEvent(client->device, cmdCode, data);
- }
- break;
-
- default:
- break;
- }
- return result;
- }
修改 HdfLedDriverBind函数,将服务绑定到框架。
- //驱动对外提供的服务能力,将相关的服务接口绑定到HDF框架
- int32_t HdfLedDriverBind(struct HdfDeviceObject *deviceObject)
- {
- if (deviceObject == NULL)
- {
- HDF_LOGE("Led driver bind failed!");
- return HDF_ERR_INVALID_OBJECT;
- }
- static struct IDeviceIoService ledDriver = {
- .Dispatch = LedDriverDispatch,
- };
- deviceObject->service = (struct IDeviceIoService *)(&ledDriver);
- HDF_LOGD("Led driver bind success");
- return HDF_SUCCESS;
- }
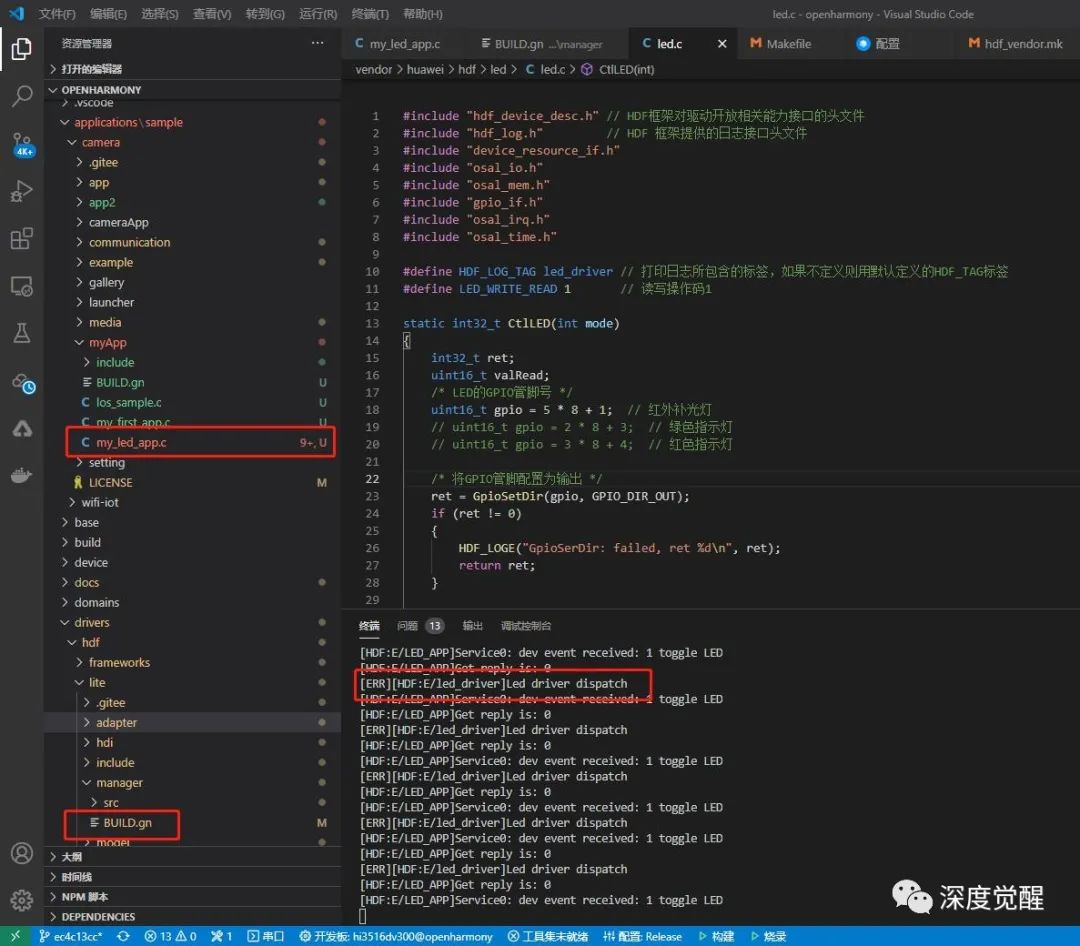
7. 业务代码
内核态核心功能,就简单实现一个每调用一次,就翻转一下LED状态的CtrlLED函数。这里mode为 -1 时为翻转,也可以直接指定高电平或低电平来开关,方便后续扩展。
其中Hi3516DV300的控制器管理12组GPIO管脚,每组8个。
GPIO号 = GPIO组索引(0~11)* 每组GPIO管脚数(8) + 组内偏移。
那么GPIO5_1的GPIO号 = 5 * 8 +1 = 41。
- static int32_t CtlLED(int mode)
- {
- int32_t ret;
- uint16_t valRead;
- /* LED的GPIO管脚号 */
- uint16_t gpio = 5 * 8 + 1; // 红外补光灯
- // uint16_t gpio = 2 * 8 + 3; // 绿色指示灯
- // uint16_t gpio = 3 * 8 + 4; // 红色指示灯
-
- /* 将GPIO管脚配置为输出 */
- ret = GpioSetDir(gpio, GPIO_DIR_OUT);
- if (ret != 0)
- {
- HDF_LOGE("GpioSerDir: failed, ret %d\n", ret);
- return ret;
- }
-
- if (mode == -1)
- {
- // 翻转输出口
- (void)GpioRead(gpio, &valRead);
- ret = GpioWrite(gpio, (valRead == GPIO_VAL_LOW) ? GPIO_VAL_HIGH : GPIO_VAL_LOW);
- }
- else
- {
- ret = GpioWrite(gpio, mode);
- }
-
- if (ret != 0)
- {
- HDF_LOGE("GpioWrite: failed, ret %d\n", ret);
- return ret;
- }
- return ret;
- }
同理,GPIO2_3、GPIO3_4和蜂鸣器组件等等通用IO设备也能相应控制,可以尽情发挥想象力了。
8. 配置Kconfig
在vendor/huawei/hdf/led/下,新建一个目录driver,再在其下新建Kconfig文件。
- config LOSCFG_DRIVERS_HDF_PLATFORM_LED
- bool "Enable HDF LED driver"
- default n
- depends on LOSCFG_DRIVERS_HDF_PLATFORM
- help
- Answer Y to enable HDF LED driver.
将其链接到板级Kconfig中,在vendor/huawei/hdf/Kconfig增加
source "../../vendor/huawei/hdf/led/driver/Kconfig"
好了,内核态的程序基本都搞定了。
9. 用户态程序
我们开始写个主程序通过消息机制来与内核态交互。
新建applications/sample/camera/myApp/my_led_app.c源文件:
9.1 定义参数
led_service为服务名称,需要与之前定义的匹配;LED_WRITE_READ为命令标识,用户态和内核态通过这个来标识消息类型。
- #define LED_WRITE_READ 1
- #define HDF_LOG_TAG LED_APP
- #define LED_SERVICE "led_service"
9.2 发送消息
先实现一个发送消息的函数SendEvent,发送字符串命令后,收回内核态reply中操作设备后的返回值,放入replyData中打印出来。这里操作成功返回0。
- static int SendEvent(struct HdfIoService *serv, char *eventData)
- {
- int ret = 0;
- struct HdfSBuf *data = HdfSBufObtainDefaultSize();
- if (data == NULL)
- {
- HDF_LOGE("fail to obtain sbuf data");
- return 1;
- }
-
- struct HdfSBuf *reply = HdfSBufObtainDefaultSize();
- if (reply == NULL)
- {
- HDF_LOGE("fail to obtain sbuf reply");
- ret = HDF_DEV_ERR_NO_MEMORY;
- goto out;
- }
-
- if (!HdfSbufWriteString(data, eventData))
- {
- HDF_LOGE("fail to write sbuf");
- ret = HDF_FAILURE;
- goto out;
- }
-
- ret = serv->dispatcher->Dispatch(&serv->object, LED_WRITE_READ, data, reply);
- if (ret != HDF_SUCCESS)
- {
- HDF_LOGE("fail to send service call");
- goto out;
- }
-
- int replyData = 0;
- if (!HdfSbufReadInt32(reply, &replyData))
- {
- HDF_LOGE("fail to get service call reply");
- ret = HDF_ERR_INVALID_OBJECT;
- goto out;
- }
- HDF_LOGE("Get reply is: %d", replyData);
- out:
- HdfSBufRecycle(data);
- HdfSBufRecycle(reply);
- return ret;
- }
9.3 设置回调
收到内核态发来的字符串,简单打印一下。
- static int OnDevEventReceived(void *priv, uint32_t id, struct HdfSBuf *data)
- {
- const char *string = HdfSbufReadString(data);
- if (string == NULL)
- {
- HDF_LOGE("fail to read string in event data");
- return HDF_FAILURE;
- }
- HDF_LOGE("%s: dev event received: %u %s", (char *)priv, id, string);
-
- return HDF_SUCCESS;
- }
9.4 主程序
先构造一个服务,通过服务名称,绑定到对应的驱动。然后设置监听,等待来自内核的消息。最后每隔1秒发出一条翻转LED的指令。
- int main(void)
- {
- struct HdfIoService *serv = HdfIoServiceBind(LED_SERVICE, 0);
- if (serv == NULL)
- {
- HDF_LOGE("fail to get service %s", LED_SERVICE);
- return HDF_FAILURE;
- }
- static struct HdfDevEventlistener listener = {
- .callBack = OnDevEventReceived,
- .priv = "Service0"};
-
- if (HdfDeviceRegisterEventListener(serv, &listener) != HDF_SUCCESS)
- {
- HDF_LOGE("fail to register event listener");
- return HDF_FAILURE;
- }
-
- char *send_cmd = "toggle LED";
- while (1)
- {
- if (SendEvent(serv, send_cmd))
- {
- HDF_LOGE("fail to send event");
- return HDF_FAILURE;
- }
- sleep(1);
- }
-
- if (HdfDeviceUnregisterEventListener(serv, &listener))
- {
- HDF_LOGE("fail to unregister listener");
- return HDF_FAILURE;
- }
-
- HdfIoServiceRecycle(serv);
- HDF_LOGI("exit");
-
- return HDF_SUCCESS;
- }
9.5 配置BUILD.gn
在 drivers/hdf/lite/manager/BUILD.gn里增加以下代码,生成led_app应用。
- lite_component("hdf_manager") {
- features = [
- ":hdf_core",
- ":led_app",
- ]
- }
-
- executable("led_app") {
- sources = [
- "//applications/sample/camera/myApp/my_led_app.c"
-
- ]
-
- include_dirs = [
- "../adapter/syscall/include",
- "../adapter/vnode/include",
- "$HDF_FRAMEWORKS/ability/sbuf/include",
- "$HDF_FRAMEWORKS/core/shared/include",
- "$HDF_FRAMEWORKS/core/host/include",
- "$HDF_FRAMEWORKS/core/master/include",
- "$HDF_FRAMEWORKS/include/core",
- "$HDF_FRAMEWORKS/include/utils",
- "$HDF_FRAMEWORKS/utils/include",
- "$HDF_FRAMEWORKS/include/osal",
- "//third_party/bounds_checking_function/include",
- ]
-
- deps = [
- "//drivers/hdf/lite/manager:hdf_core",
- "//drivers/hdf/lite/adapter/osal/posix:hdf_posix_osal",
- ]
-
- public_deps = [
- "//third_party/bounds_checking_function:libsec_shared",
- ]
-
- defines = [
- "__USER__",
- ]
-
- cflags = [
- "-Wall",
- "-Wextra",
- "-Werror",
- ]
- }
10. 编译和烧录
由于这次我们要用到HDF框架,需要用到的组件比较多,简单复制一个build\lite\product\ipcamera_hi3516dv300.json改名为my_hi3516dv300即可。
python build.py my_hi3516dv300 -b debug
编译和烧录的过程参考前文,这里不再赘述了。顺利的话,启动程序就能看见LED欢快的闪烁了。
./bin/led_app


红外光在肉眼下不太显眼,在镜头下比较亮些,照度范围很大,后续再测一下夜视补光的效果。
总结
驱动开发涉及到文件和配置比较多,关系也比较纷繁,而且分散在各个目录。
这里列出主要文件再梳理一下:
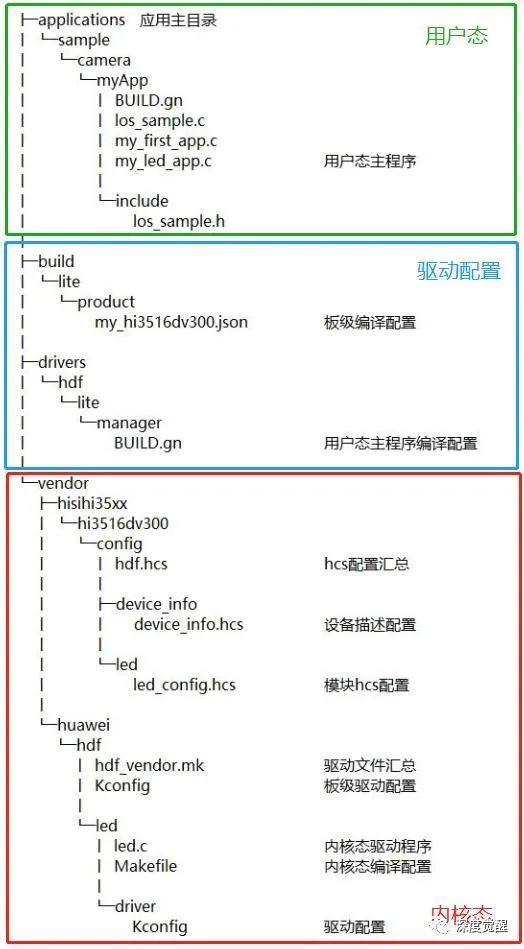
大致上分三个部分,内核态、用户态和驱动配置。
1. 内核态
首先由led.c生成名为led_service的服务,以g_ledDriverEntry结构注册到HCS框架。编译成hdf_led_driver驱动,通过 huawei/hdf/hdf_vendor.mk链接到内核镜像中。
通过 HdfLedDriverBind函数将led_driver模块绑定到框架,IDeviceIoService中的Dispatch方法来处理来自用户态消息。
2. 用户态
用户态以HdfIoServiceBind通过服务名led_service来找到相应的驱动,用HdfSbufWriteString来发送消息,serv->dispatcher->Dispatch来接收返回值,通过HdfDeviceRegisterEventListener设置监听,来获取内核态主动发送的消息。
3. 驱动配置
以模块名led_driver找到注册到HCS框架的驱动程序(内核侧的别名);
以服务名led_service,暴露给用户态程序或内核态程序调用(用户侧的别名);
以led_config链接驱动私有配置文件。两个别名双向解绑,最后通过配置文件来进行耦合,保证了灵活性。这种设计在分布式的场合中,会有比较大的便利性。
资料下载
本期相关文件资料,可在公众号“深度觉醒”,后台回复:“ohos05”,获取下载链接。
下一篇
本期主要介绍了一下HDF的驱动开发
界面部分碍于篇幅留在下一篇介绍了,
敬请期待...


往期推荐

