
热门标签
热门文章
- 1(CVE-2019-0227)Axis<=1.4 远程命令执行漏洞_apache axis远程命令执行漏洞
- 2计算机网络——ARP地址欺骗_检测到一个arp地址欺骗在接口
- 3Docker - 6. 容器常用命令 docker run、ps、exit、rm、start、restart、stop、kill_docker rm
- 4OpenCv —— Win10使用OpenCv调用Yolov5的.pt导出的.onnx模型进行测试【CPU版Cv】(附源码、附CV编译视频)_opencv调用pt模型
- 5c++随机数方法
- 6数据结构--双端队列
- 7spring cloud——Eureka服务发现和治理_服务的发现和治理 rsureka
- 8机器学习小实战(六) XGBoost基本原理_强化学习 xgb
- 9a770m和rtx3060哪个好 a770m和3060差距_intel a770m显卡和n家的3060显卡哪个强?
- 10贪心算法 之会议安排_已知会议时长动态规划安排会议
当前位置: article > 正文
用stm32f407单片机核心板和gy-91模块做一个功能强大的四旋翼无人机飞控,程序从零开始做起_stm32无人机gps航迹
作者:繁依Fanyi0 | 2024-04-11 04:47:41
赞
踩
stm32无人机gps航迹
基于STM32F4核心板的经典项目程序,远比网上搜索的开发板例程更有价值,历时2年时间打造。
适合学生学习,工程师提高技术等等。
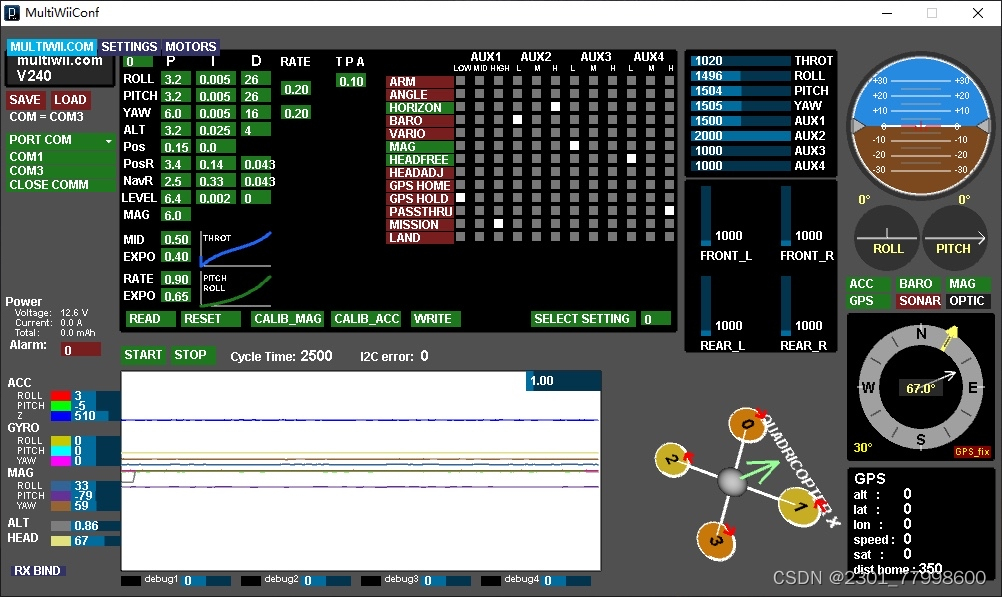
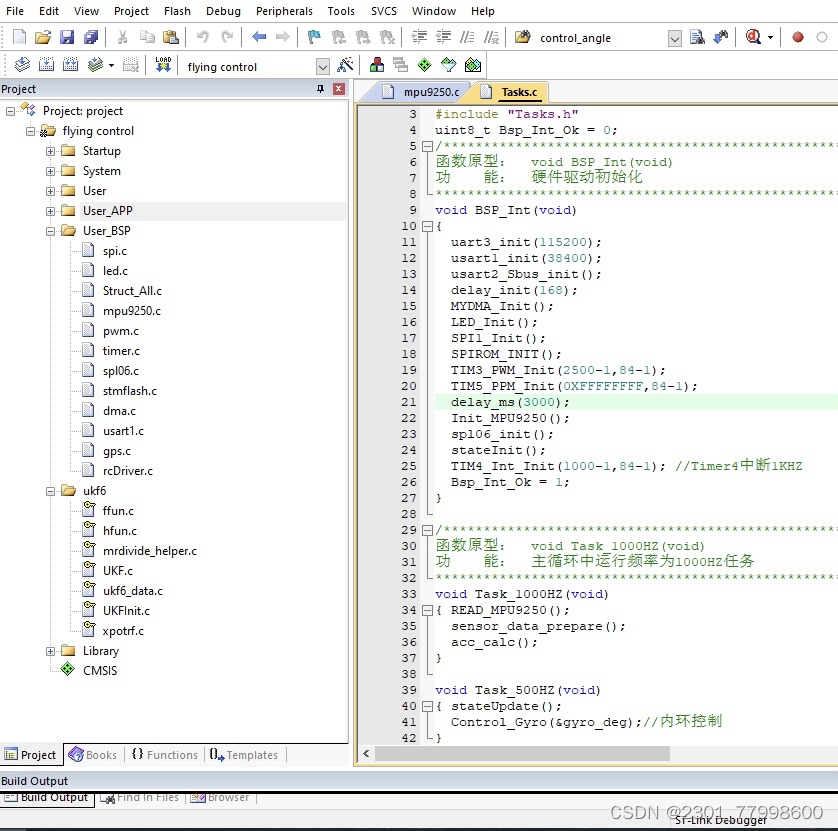
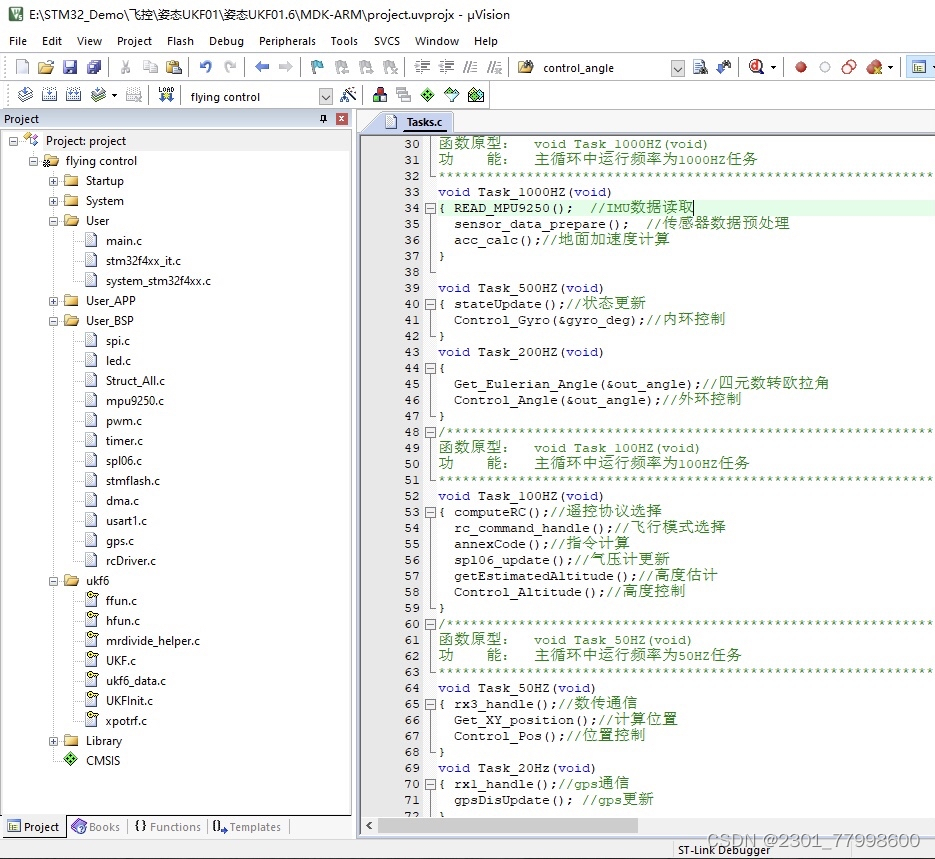
项目内容为:用stm32f407单片机核心板和gy-91模块做一个功能强大的四旋翼无人机飞控,程序从零开始做起,简洁而不简单。
里面主要包括pid控制器,无迹卡尔曼滤波UKF,IMU+GPS组合导航,上位机通信,遥控器通信和解码,dma传输,手机蓝牙控制等。
实现无人机垂直起降,定点,轨迹控制等。
包括原理图方案,单片机程序及固件,上位机程序及运行环境。
ID:69100675374361760

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/402978
推荐阅读
相关标签

