
热门标签
热门文章
- 1FreeRTOS作业day1
- 2CentOS 7离线升级OpenSSH至9.1p1操作过程及遇上的问题
- 3STM32F1和STM32F4 区别_stm32f1系列和stm32f4系列微控制器分别使用( )和(
- 4重力加速度陀螺仪传感器MPU-6050(一)_陀螺仪加速度一般采集多少hz
- 5解决Nacos2.2.1启动报错_the length of secret key must great than or equal
- 6基于串口控制SDRAM的读写操作_使用uart 实现sdram读写
- 7集成oss_阿里云云原生数据湖分析DLA Serverless Spark重磅发布,助力企业低成本挖掘OSS数据价值...
- 8如何查看并删除conda环境_conda 卸载环境
- 9教你用python截屏APP,将截取到的图片进行文字识别并将信息保存在EXCEL中。(附源码)_雷电模拟器 提取页面文字
- 10汇智动力软件测试问题,汇智动力—测试工程师都是怎么写测试用例的?
当前位置: article > 正文
fanuc机器人与视觉通信_视觉检测(FANUC)与OFFSET补偿方式分类
作者:繁依Fanyi0 | 2024-04-17 06:31:48
赞
踩
fanuc机器人 第三方视觉识别
视觉检测(FANUC)与OFFSET补偿方式分类
现在视觉软件根据现场应用需求机器人公司一般开发了很多版本,不同版本的功能有所区别,一般分为三类检测方式可以满足实际应用,主要有三个类别2D视觉检测,2.5D视觉检测以及和D视觉检测。在应用选型时需要自己选择合适的功能版本。
(1) 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度 R)。如图(左一)
(2) 2.5D 除检测目标平面位移与旋转外,还可以检测 Z 轴方向上的目标高度变化。如下图(中间)
(3) 3D 用于检测目标 3 维内的位移与旋转角度变化。如下图(右一)
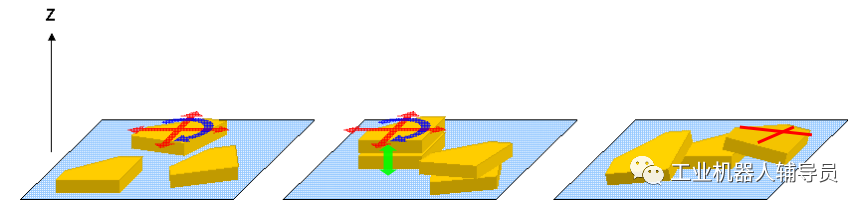
备注:除3D外,其他2D和2.5D在 目标XY 轴方向上的旋转角度不会被计算在内。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/438684
推荐阅读
相关标签

