
热门标签
热门文章
- 1【机器学习】决策树特征选择准则 信息增益、信息增益率、基尼系数的计算及其python实现_机器学习增益率计算题
- 2Git 中强行拉取,覆盖本地修改_git强制将远程覆盖到本地
- 3图像处理ASIC设计方法 笔记18 轮廓跟踪算法的硬件加速方案
- 4【深入浅出Spring原理及实战】「Web请求读取系列」如何构建一个可重复读取的Request的流机制_javaweb 请求流重复读取
- 5面向中文大模型价值观的评估与对齐研究:给AI的100瓶毒药
- 6uni.app开发小程序如何获取当前经纬度、位置信息以及如何重新发起授权定位_uniapp获取当前经纬度
- 7VHDL仿真ModelSim使用简介_modelsim vhdl
- 8mvc控制器html返回json,asp.net-mvc – 如何从MVC控制器返回Json对象到视图
- 9Meta 新推出的实时语音翻译模型 Seamless_seamless expressive
- 10华纳云:ubuntu中fdisk找不到硬盘怎么解决?
当前位置: article > 正文
unet++实现卫星遥感影像建筑物提取_whu_building_dataset
作者:繁依Fanyi0 | 2024-05-03 23:29:46
赞
踩
whu_building_dataset
如何自动地从高分辨率遥感影像中提取建筑物等人工目标是高分辨率遥感影像处理与理解领域的一个热点与难点问题。之前我们介绍了unet实现建筑物智能提取的文章。本篇文章我们将学习如何使用pytorch实现UNet++来进行遥感建筑物的智能提取。
智能提取的流程
基于深度学习的遥感建筑物智能提取,首先需要制作数据集,然后构建深度学习神经网络,接着让深度学习神经网络从制作的数据集中学习建筑物的特征,最终实现建筑物的智能提取。
数据集选择
本文选取的是WHU-Building-DataSets。数据集[1]包含了从新西兰基督城的航空图像中提取的超过220,000个独立建筑,图像被分割成了8189个512×512像素的片,其中包含了训练集(130,500个建筑),验证集(14,500个建筑)和测试集(42,000个建筑)。
UNet++
此次我们使用的模型为UNet++。UNet++是一种基于深度监督的编码器-解码器网络结构,并且有密集的跳跃链接。它是在原始的U-Net基础上增加了重新设计的跳跃路径、密集跳跃连接和深度监督。 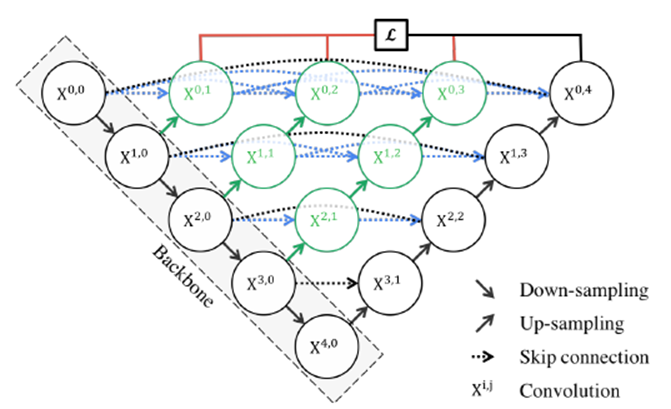
import torch
from torch import nn
class VGGBlock(nn.Module):
def __init__(self, in_channels, middle_channels, out_channels):
super().__init__()
self.relu = nn.ReLU(inplace=True)
self.conv1 = nn.Conv2d(in_channels, middle_channels, 3, padding=1)
self.bn1 = nn.BatchNorm2d(middle_channels)
self.conv2 = nn.Conv2d(middle_channels, out_channels, 3, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, x):
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
return out
class NestedUNet(nn.Module):
def __init__(self, in_channels, out_channels, deep_supervision=False, **kwargs):
super().__init__()
nb_filter = [32, 64, 128, 256, 512]
self.deep_supervision = deep_supervision
self.pool = nn.MaxPool2d(2, 2)
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
self.conv0_0 = VGGBlock(in_channels, nb_filter[0], nb_filter[0])
self.conv1_0 = VGGBlock(nb_filter[0], nb_filter[1], nb_filter[1])
self.conv2_0 = VGGBlock(nb_filter[1], nb_filter[2], nb_filter[2])
self.conv3_0 = VGGBlock(nb_filter[2], nb_filter[3], nb_filter[3])
self.conv4_0 = VGGBlock(nb_filter[3], nb_filter[4], nb_filter[4])
self.conv0_1 = VGGBlock(nb_filter[0]+nb_filter[1], nb_filter[0], nb_filter[0])
self.conv1_1 = VGGBlock(nb_filter[1]+nb_filter[2], nb_filter[1], nb_filter[1])
self.conv2_1 = VGGBlock(nb_filter[2]+nb_filter[3], nb_filter[2], nb_filter[2])
self.conv3_1 = VGGBlock(nb_filter[3]+nb_filter[4], nb_filter[3], nb_filter[3])
self.conv0_2 = VGGBlock(nb_filter[0]*2+nb_filter[1], nb_filter[0], nb_filter[0])
self.conv1_2 = VGGBlock(nb_filter[1]*2+nb_filter[2], nb_filter[1], nb_filter[1])
self.conv2_2 = VGGBlock(nb_filter[2]*2+nb_filter[3], nb_filter[2], nb_filter[2])
self.conv0_3 = VGGBlock(nb_filter[0]*3+nb_filter[1], nb_filter[0], nb_filter[0])
self.conv1_3 = VGGBlock(nb_filter[1]*3+nb_filter[2], nb_filter[1], nb_filter[1])
self.conv0_4 = VGGBlock(nb_filter[0]*4+nb_filter[1], nb_filter[0], nb_filter[0])
if self.deep_supervision:
self.final1 = nn.Conv2d(nb_filter[0], out_channels, kernel_size=1)
self.final2 = nn.Conv2d(nb_filter[0], out_channels, kernel_size=1)
self.final3 = nn.Conv2d(nb_filter[0], out_channels, kernel_size=1)
self.final4 = nn.Conv2d(nb_filter[0], out_channels, kernel_size=1)
else:
self.final = nn.Conv2d(nb_filter[0], out_channels, kernel_size=1)
def forward(self, input):
x0_0 = self.conv0_0(input)
x1_0 = self.conv1_0(self.pool(x0_0))
x0_1 = self.conv0_1(torch.cat([x0_0, self.up(x1_0)], 1))
x2_0 = self.conv2_0(self.pool(x1_0))
x1_1 = self.conv1_1(torch.cat([x1_0, self.up(x2_0)], 1))
x0_2 = self.conv0_2(torch.cat([x0_0, x0_1, self.up(x1_1)], 1))
x3_0 = self.conv3_0(self.pool(x2_0))
x2_1 = self.conv2_1(torch.cat([x2_0, self.up(x3_0)], 1))
x1_2 = self.conv1_2(torch.cat([x1_0, x1_1, self.up(x2_1)], 1))
x0_3 = self.conv0_3(torch.cat([x0_0, x0_1, x0_2, self.up(x1_2)], 1))
x4_0 = self.conv4_0(self.pool(x3_0))
x3_1 = self.conv3_1(torch.cat([x3_0, self.up(x4_0)], 1))
x2_2 = self.conv2_2(torch.cat([x2_0, x2_1, self.up(x3_1)], 1))
x1_3 = self.conv1_3(torch.cat([x1_0, x1_1, x1_2, self.up(x2_2)], 1))
x0_4 = self.conv0_4(torch.cat([x0_0, x0_1, x0_2, x0_3, self.up(x1_3)], 1))
if self.deep_supervision:
output1 = self.final1(x0_1)
output2 = self.final2(x0_2)
output3 = self.final3(x0_3)
output4 = self.final4(x0_4)
return [output1, output2, output3, output4]
else:
output = self.final(x0_4)
return output

- 1
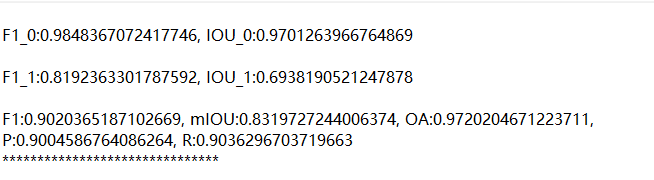
训练结果
可以看到模型训练了40轮,训练损失呈平滑下降趋势,验证损失存在较大波动,并且缓慢上升趋势。说明模型可能存在过拟合。 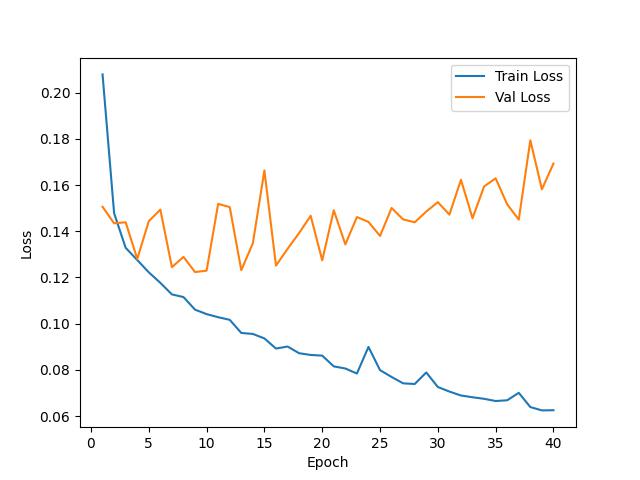
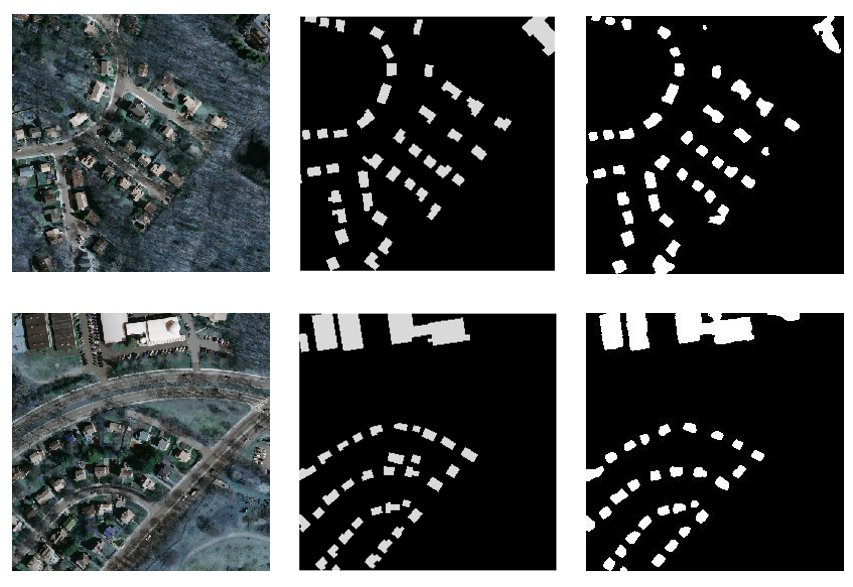
结果对比
总结
本期的分享就到这里,感兴趣的点点关注。如需要获取完整代码,可加入我们星球,星球会持续更新相关的数据集与完整代码。  加入前不要忘了领取优惠券哦!
加入前不要忘了领取优惠券哦! 
参考资料
WHU-Building-DataSets: https://study.rsgis.whu.edu.cn/pages/download/building_dataset.html
本文由 mdnice 多平台发布
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/532076
推荐阅读
相关标签

