
热门标签
热门文章
- 1测试用例编号命名规则_等价类划分测试用例设计方法
- 2李宏毅《机器学习》丨4. Deep Learning(深度学习)_李宏毅 deep learning
- 3RabbitMq的windows版本安装
- 4vue中的MVVM模式讲解_vue mvvm
- 5定薪17K*15,阿里测开岗上岸面经分享...._阿里测开面经
- 6在本地PC运行 Stable Diffusion 2.0_imagesourcesolution
: solution where t : graphr - 7【详解】Java多线程之内存模型三大特性_多线程中三大特性?如何解决?线程有哪些状态?
- 8基于PHP后台微信图书馆座位预约小程序系统设计与实现
- 9【前端学习——react文档】学习react文档笔记(持续更新)
- 10最全解读Unicode字符编码_unicode编码
当前位置: article > 正文
基于Qlearning强化学习的路径规划算法matlab仿真_qlearning matlab代码
作者:繁依Fanyi0 | 2024-05-08 09:42:29
赞
踩
qlearning matlab代码
目录
1.算法运行效果图预览


2.算法运行软件版本
MATLAB2022A
3.部分核心程序
- ...................................................
-
- [T,crowd,flow,R] = Update_M(T,crowd,flow,width,dis,cor,XY1);
- last_s = XYs;
- [Q,XYs] = qlearning(Q,R,XYs,XY1);
- Reward0 = Reward0 + R(last_s,XYs);
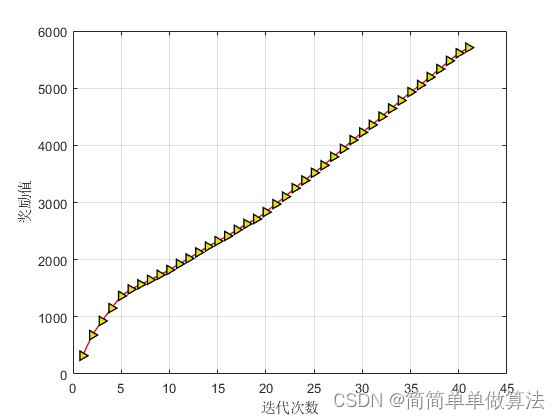
- figure;
- plot(Rewards,'-r>',...
- 'LineWidth',1,...
- 'MarkerSize',6,...
- 'MarkerEdgeColor','k',...
- 'MarkerFaceColor',[0.9,0.9,0.0]);
-
- grid on
- xlabel('迭代次数');
- ylabel('奖励值');
-
-
- figure;
- plot(path,'-r>',...
- 'LineWidth',1,...
- 'MarkerSize',6,...
- 'MarkerEdgeColor','k',...
- 'MarkerFaceColor',[0.9,0.9,0.0]);
- hold on
- grid on
- xlabel('迭代次数');
- ylabel('路线变化');
- 0039

4.算法理论概述
路径规划在机器人、自动驾驶等领域中具有重要应用。Q-learning是一种经典的强化学习算法,可以用于解决路径规划问题。本文介绍了基于Q-learning的路径规划算法,该算法可以在未知环境中学习最优路径,具有广泛的应用前景。Q-learning是一种基于值函数的强化学习算法,用于学习最优策略。在路径规划问题中,状态(State)表示机器人所处的位置,动作(Action)表示机器人可以采取的移动方向,奖励(Reward)表示机器人根据采取的动作获得的反馈。Q-learning的目标是学习一个Q值函数,用于评估在给定状态下采取某个动作的预期回报。
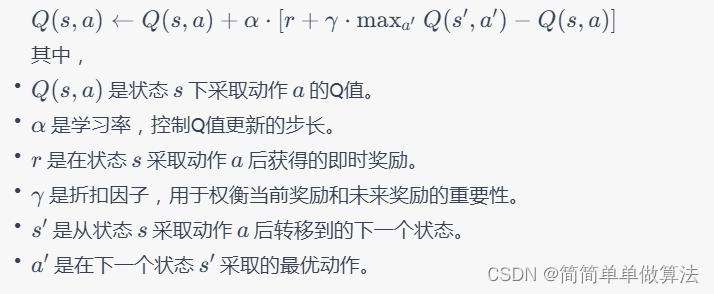
4.1 Q值更新规则
在每个时间步,Q-learning根据以下更新规则更新Q值:
4.2 基于Q-learning的路径规划算法设计
在路径规划中,状态可以表示机器人所处的位置坐标,动作可以表示机器人可以向上、下、左、右等方向移动。将Q值初始化为一个小的随机值或零。

可以通过逐渐减小学习率和折扣因子,或者使用不同的策略来调优算法,以实现更好的性能和收敛性。
4.3 Q-learning路径规划流程
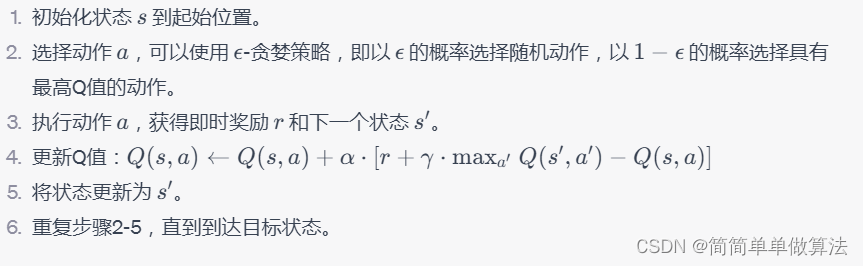
基于Q-learning的路径规划算法可以在未知环境中学习最优路径,具有广泛的应用前景。通过合理的参数设置和调优,可以实现高效的路径规划。
5.算法完整程序工程
OOOOO
OOO
O
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/553970
推荐阅读
相关标签

