
热门标签
热门文章
- 1省钱!NewBing硬核新玩法;手把手教你训练AI模特;用AI替代同事的指南;B站最易上手AI绘画教程 | ShowMeAI日报_ai绘画教程bilibili
- 2一口气说出 Redis 16 个常见使用场景_redis使用场景
- 3动态规划-思考解决动态规划问题_你的公司老板给了你一张n×n个格子组成的动态规划
- 4B样条曲线优化各种路径规划算法,matlab栅格地图。_b样条优化
- 5three.js流动线_threejs流动线
- 6自然语言处理工具包:NLTKspaCy
- 7超星高级语言程序设计实验作业 (实验01顺序程序设计)_分别输入三个浮点数代表a、b、c的值;如果c的值为0,直接输出-1,否则计算并输出多项
- 8笔记本wifi与台式机、内网服务器共网、共享wifi详细教程_服务器没有网,怎么共享笔记本网络
- 9核函数kernal
- 10Android~获取WiFi MAC地址和IP方法汇总_android 获取本机wlan mac地址
当前位置: article > 正文
MPU6050姿态解算——Mahony互补滤波_mahony互补滤波 pi参数
作者:繁依Fanyi0 | 2024-05-15 21:22:36
赞
踩
mahony互补滤波 pi参数
引入
DMP与互补滤波数据对比
Long time no see,首先放一张图,黄色的是DMP获取的Pitch角数据,紫红色的是互补滤波解算的Pitch角数据(人为晃动陀螺仪增加了干扰)。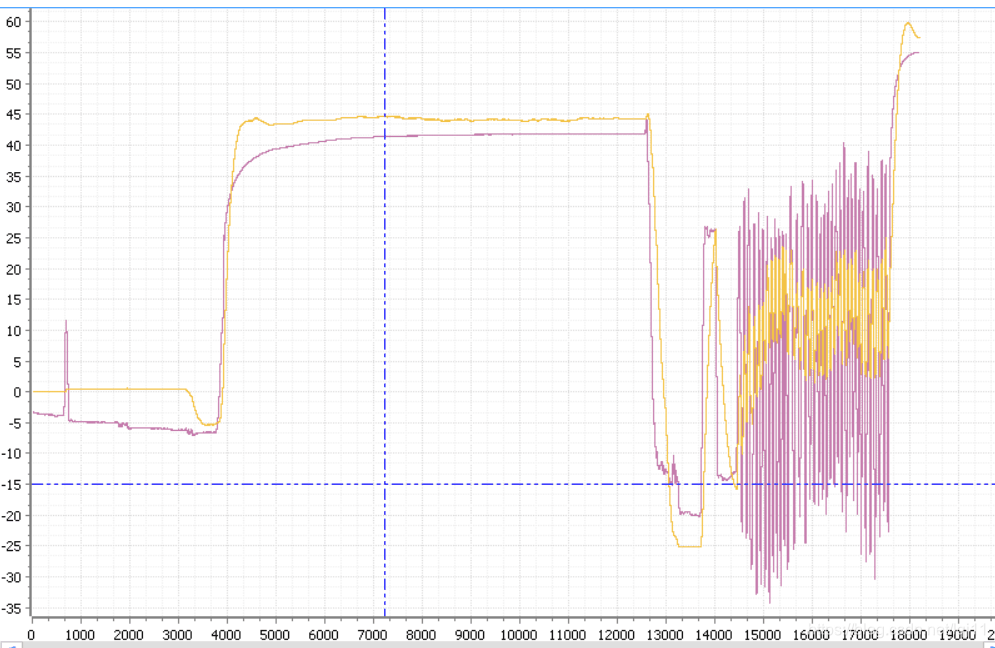
DMP与互补滤波的优缺点分析
| DMP | 互补滤波 |
|---|---|
| 不需要了解姿态解算知识,直接调用库函数,操作简单 | 需要掌握一定的姿态解算知识 |
| 解算速度慢,最大只能到200Hz | 速度快,而且随着单片机主频提高会更快 |
| 真实性差 | 真实性较好 |
从上面的曲线图结合我实际的干扰,在我大范围晃动陀螺仪的时候,DMP的角度变化还是很小,感觉是为了滤波而滤波,数据的真实性不可靠。而且在动态曲线观察的时候,互补滤波明显比DMP得到的的数据更快,时效性也
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/575057
推荐阅读
相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

