
- 11-基于ArUco码的标记与检测
- 2C++函数参数的默认值_c++函数形参如果有默认值
- 3RabbitMQ优化消息阻塞系列(二)参数调优_rabbit:listener-container 参数
- 4哪个学校计算机每年招不满,这两所211大学,录取分数线低,却常年招不满生,适合考生捡漏...
- 5JsonObject判断是否为空_jsonobject判断为空
- 6java实现中文分词
- 7Git的rebase命令说明_linux git rebase
- 8HTML5期末大作业:甜品奶茶网站设计——甜品奶茶店(19页) HTML5网页设计成品_学生DW静态网页设计_web课程设计网页制作_奶茶网页设计
- 9C++刷题--选择题4_c++ 函数 只用一个默认值
- 10IT运维工程师职业发展与出路
1.16 LeetCode总结(基本算法)动态规划2
赞
踩
70. 爬楼梯
首先想到的是递归:
// 递归
int climbStairs(int n) {
if (n == 1) {
return 1;
} else if (n == 2) {
return 2;
}
return climbStairs(n - 1) + climbStairs(n - 2);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11

我们先来看看这个递归的时间复杂度吧:
递归时间复杂度 = 解决一个子问题时间*子问题个数
一个子问题时间 = f(n-1)+ f(n-2),也就是一个加法的操作,所以复杂度是 O(1);
问题个数 = 递归树节点的总数,递归树的总节点 = 2n-1,所以是复杂度O(2n)。
因此,青蛙跳阶,递归解法的时间复杂度 = O(1) * O(2^n) = O(2^n),就是指数级别的,爆炸增长的,如果n比较大的话,超时很正常的了。
回过头来,你仔细观察这颗递归树,你会发现存在大量重复计算,比如 f(8) 被计算了两次,f(7) 被重复计算了3次…所以这个递归算法低效的原因,就是存在大量的重复计算!
既然存在大量重复计算,那么我们可以先把计算好的答案存下来,即造一个备忘录,等到下次需要的话,先去备忘录查一下,如果有,就直接取就好了,备忘录没有才开始计算,那就可以省去重新重复计算的耗时啦!这就是带备忘录的解法。
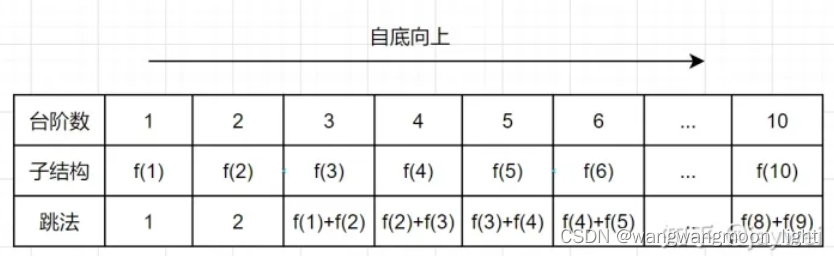
自底向上的动态规划
动态规划跟带备忘录的递归解法基本思想是一致的,都是减少重复计算,时间复杂度也都是差不多。但是呢:
带备忘录的递归,是从f(10)往f(1)方向延伸求解的,所以也称为自顶向下的解法。
动态规划从较小问题的解,由交叠性质,逐步决策出较大问题的解,它是从f(1)往f(10)方向,往上推求解,所以称为自底向上的解法。
动态规划有几个典型特征,最优子结构、状态转移方程、边界、重叠子问题。在青蛙跳阶问题中:
f(n-1) 和 f(n-2) 称为 f(n) 的最优子结构
f(n) = f(n-1) + f(n-2) 就称为状态转移方程
f(1) = 1, f(2) = 2 就是边界啦
比如f(10)= f(9)+f(8), f(9) = f(8) + f(7) , f(8)就是重叠子问题。
我们来看下自底向上的解法,从 f(1) 往 f(10) 方向,想想是不是直接一个for循环就可以解决啦,如下:
int climbStairs(int n){ //f(x) = f(x-1) + f(x-2) if (n <= 1){ // 第0阶和第1阶只有一种方法 return 1; } int way; int memo[2] = {1,1}; for (int i = 2; i <= n; ++i) { // 上楼梯->从第2阶楼梯开始 way = memo[0] + memo[1]; memo[0] = memo[1]; memo[1] = way; } return way; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
动态规划的解题思路
动态规划的核心思想就是拆分子问题,记住过往,减少重复计算。 并且动态规划一般都是自底向上的,因此到这里,基于青蛙跳阶问题,我总结了一下我做动态规划的思路:
- 穷举分析
当台阶数是1的时候,有一种跳法,f(1) = 1
当只有2级台阶时,有两种跳法,第一种是直接跳两级,第二种是先跳一级,然后再跳一级。即f(2) = 2;
当台阶是3级时,想跳到第3级台阶,要么是先跳到第2级,然后再跳1级台阶上去,要么是先跳到第 1级,然后一次迈 2 级台阶上去。所以f(3) = f(2) + f(1) = 3
当台阶是4级时,想跳到第3级台阶,要么是先跳到第3级,然后再跳1级台阶上去,要么是先跳到第 2级,然后一次迈 2 级台阶上去。所以f(4) = f(3) + f(2) = 5
当台阶是5级时…
- 确定边界
通过穷举分析,我们发现,当台阶数是1的时候或者2的时候,可以明确知道青蛙跳法。f(1) =1,f(2) = 2,当台阶n>=3时,已经呈现出规律f(3) = f(2) + f(1) =3,因此f(1) =1,f(2) = 2就是青蛙跳阶的边界。
- 找出规律,确定最优子结构
n>=3时,已经呈现出规律 f(n) = f(n-1) + f(n-2) ,因此,f(n-1)和f(n-2) 称为 f(n) 的最优子结构。什么是最优子结构?有这么一个解释: 一道动态规划问题,其实就是一个递推问题。假设当前决策结果是f(n),则最优子结构就是要让 f(n-k) 最优,最优子结构性质就是能让转移到n的状态是最优的,并且与后面的决策没有关系,即让后面的决策安心地使用前面的局部最优解的一种性质
- 写出状态转移方程
通过前面3步,穷举分析,确定边界,最优子结构,我们就可以得出状态转移方程啦
- 代码实现
我们实现代码的时候,一般注意从底往上遍历,然后关注下边界情况,空间复杂度,也就差不多啦。动态规划有个框架的,大家实现的时候,可以考虑适当参考一下:
dp[0][0][...] = 边界值
for (状态1 :所有状态1的值) {
for (状态2 :所有状态2的值) {
for (...) {
// 状态转移方程
dp[状态1][状态2][...] = 求最值
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
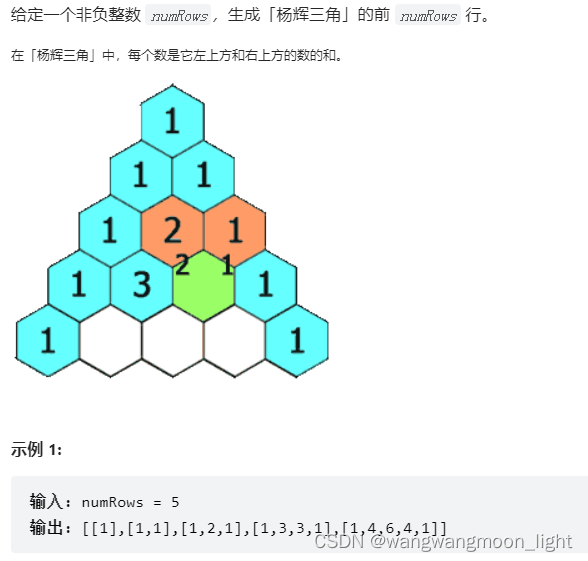
118. 杨辉三角
int **generate(int numRows, int *returnSize, int **returnColumnSizes) { int **res = (int **)malloc(sizeof(int *) * numRows);; *returnSize = numRows; // 行个数 *returnColumnSizes = (int *)malloc(sizeof(int) * numRows); // 一维数组,每个元素代表了当前排有多少个有效的列 printf("int *%d\n", sizeof(int *)); printf("int %d\n", sizeof(int)); for (int i = 0; i < numRows; ++i) { res[i] = (int *)malloc(sizeof(int) * (i + 1)); (*returnColumnSizes)[i] = i + 1; // 列元素个数 res[i][0] = res[i][i] = 1; for (int j = 1; j < i; ++j) { res[i][j] = res[i - 1][j - 1] + res[i - 1][j]; } } return res; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
在LeetCode里 Sizeof(int *) 和 Sizeof(int)的大小时不一样的,注意:

C 动态规划举例

手法1. 首先容易想到的是使用递归来求解,但递归的效率很低
// 递归
int climbStairs(int n) {
if (n <= 2) {
return n;
}
return climbStairs(n - 1) + climbStairs(n - 2);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
其实记忆化搜索就是在递归的条件上,为减少递归次数而产生的
比如下述代码中对于 mem[n] !=0 直接return memo[n].
我们总是习惯自顶向下思考问题,而不容易自底向上思考问题
手法2:记忆化搜索 – 自顶向下
// 记忆化搜索 -- 自顶往下
int memo[64] = { 0 };
int climbStairs(int n) {
if (n <= 2) {
return n;
}
// 如果满足条件则直接返回记忆数组里的值,减少递归次数
if (n < 64 && memo[n] != 0) {
return memo[n];
}
// 不满足条件才进行递归 O(n)
memo[n] = climbStairs(n-1) + climbStairs(n-2);
return memo[n];
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
手法3:动态规划 – 自底往上
// 动态规划 -- 自底往上 int climbStairs(int n) { if (n <= 2) { return n; } int a1 = 1; int a2 = 2; int memo = 0; // 自下而上的进行计算,动态规划 for (int i = 3; i <= n; i++) { memo = a1 + a2; a1 = a2; a2 = memo; } return memo; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
动态规划,将原问题拆解成若干子问题,同时保存子问题的答案,使得每个子问题只求解一次,最终获得原问题的答案;
下面这个图非常清晰地说明了动态规划的引入

D 0-1背包问题
– 动态规划中可以解决的一类最为经典的问题 – 01背包问题

状态转移方程:

调试程序可以采用如下图片的数据,利于理解背包算法:
建立一个 3*6 二维数组,第0行只考虑第0个物品;第一行考虑 a[1][2]的weight为2,既可以放在id0的物品,也可以放下id1的物品;但两者相比,id1的物品要大一些,我们考虑放id1的物品。

如图,在放置a[1][2]这个元素时考虑:如果不放 ID1 的物品,那么背包价值为6,如果考虑放 ID1 的物品,需要回到a[0][0]的价值,加上放 ID1 物品的价值和为10,两者比较(10 > 6),放的价值大,所以考虑放 ID1的物品。
继续布满这个图,则得到下图:

如图,在放置a[2][4]这个元素时考虑:如果不放 ID2 的物品,那么背包价值为16,如果考虑放 ID2 的物品,需要回到a[1][1]的价值 6 ,加上放 ID2 物品的价值和为18,两者比较(18 > 16),放的价值大,所以考虑放 ID2的物品。
如下代码,就是建立上述图片里的二维数组的值(先求解了第0行数组和第1行往后的逐列逐行数组)

其实我们做0-1背包问题时,就是自底向上地完善这个 3*6 的二维数组,而处理的思路正好就是 动态规划.

