
热门标签
热门文章
- 1人工智能的变革趋势: 从弱人工智能到强人工智能,再到生物智能
- 2netron工具简单使用_使用netron
- 3【OpenCV实战】这是我看过最详细的计算机视觉小项目,基于OpenCV进行长时间曝光,学到了~(赶紧收藏)_opencv项目实战
- 4VUE热更新内存溢出的解决办法_<--- js stacktrace ---> ==== js stack trace ======
- 5Linux中DNS服务器搭建_linuxdns服务器的搭建
- 6【rikirobot】ROS rikirobot 配置小车网络并进行远程端控制
- 75.3.1 配置交换机 SSH 管理和端口安全_交换机ssh配置要求,把设置enable密文密码为123
- 8javaee tomcat_eclipse javaee tomcat包
- 9怎么复习信息系统项目管理师?_信息系统项目管理师备考
- 10AI智能体研发之路-模型篇(一):大模型训练框架LLaMA-Factory在国内网络环境下的安装、部署及使用_llamafactory 部署
当前位置: article > 正文
基于Deeplabv3+和Unet的语义分割案例分析——津南数字制造算法挑战复赛_deeplabv3结果不如unet
作者:繁依Fanyi0 | 2024-06-01 20:19:18
赞
踩
deeplabv3结果不如unet
写在前面
无论是物体检测,还是语义分割,笔者都是比赛中才开始了解各种网络架构,优劣对比也是参考的网络上各种评价,没有项目经验。所以,选择网络架构时局限性很大,初赛时,毫不犹豫的选择了网上点赞最多的YOLOv3;复赛时,先是选择了deeplabv3+调试,后来又转到了可操作性更高的Unet。建议大家做比赛时,一定要多调研(百度,知乎,Github…),多交流(关注比赛群里的交流)。
赛题介绍
复赛赛题和初赛基本一致,区别在于复赛是语义分割问题,评价标准是:5类IoU的平均值。
数据预处理
基本操作:旋转、缩放、随机剪裁。
物体检测框架选择
这里很简单地介绍一下Deeplabv3+和Unet。
Deeplabv3+:
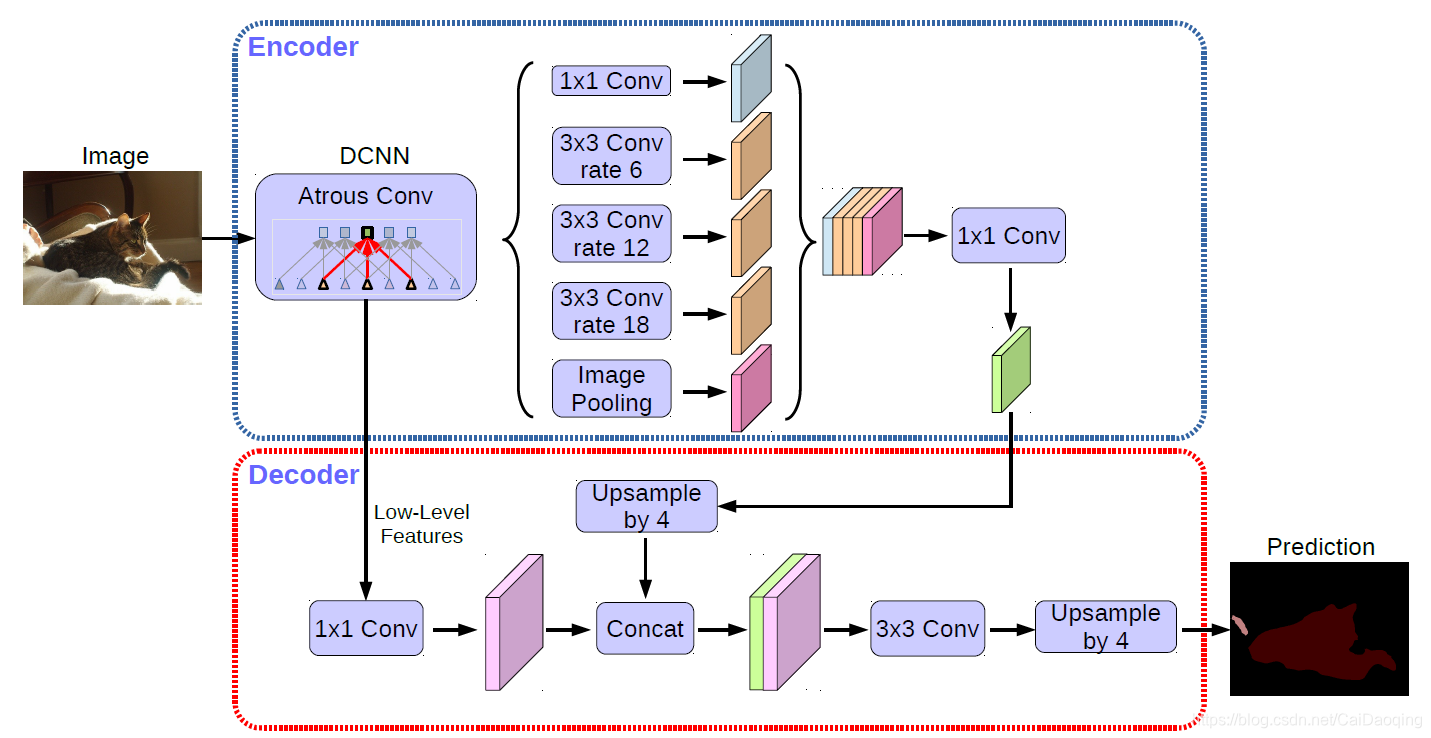
特点:
- ASPP结构;
- 引入encode-decode结构,Deeplabv3的decode比较粗糙;
- 使用改进后的Xception作为backbone
Unet:
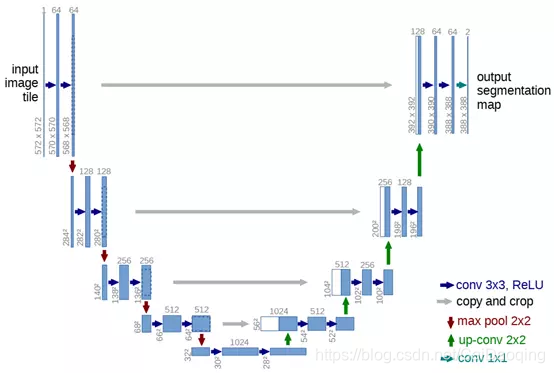
特点:
- encoder-decoder代表
- 简单,高效,易懂,可操作性强
调参过程
- 同初赛,训练一个二分类网络筛选测试集;
- backbone:deeplabv3+尝试了resnet50,resnet101,resnet152和xception,resnet152效果最好;Unet尝试了resnet50,se-resnet50,se-resnext50,resnet101,se-resnet101,se-resnext50效果最好;
- 更换loss:BCEloss,Lovasz-Softmax loss,BCEloss+Lovasz-Softmax loss,OHEM。OHEM效果更好。
- TTA:多尺度预测+水平翻转;
- Unet的decoder方式:试了SCSE、IBN和OC。IBN效果更好。
小结
- Deeplabv3+分割效果更好,边缘更光滑,但是训练和推断速度都比较慢;
- Unet训练速度很快,硬件资源有限的情况下,可以用Unet尝试更多的想法;
- 比赛数据集里有这样的问题:在训练集里同一个像素有多于一个的类别,测试集同一个像素也需要预测多个类别。对于这个问题,笔者尝试了将多分类问题转换为多个二分类问题,效果没有大的改善;
- Deeplabv3+增大epoch有改善趋势,但是它,实在,是好慢…
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/659276
推荐阅读

相关标签

