- 1Hive hiveserver2 监听端口10000异常 启动失败_hive端口号10000没有启动
- 2搭建自己的V Rising自建服务器,和小伙伴们告别官方服务器卡顿,快乐联机_vrising服务器
- 3《庆余年》值得一看吗?Python告诉你谁在关注 | CSDN原力计划
- 4startActivity的生命周期_startactivity 生命周期
- 5适用于SQL开发人员的7个便捷的SQL脚本
- 6python爬取豆瓣电影评论_python 爬取豆瓣电影评论,并进行词云展示及出现的问题解决办法...
- 7传统webshell上传方法小结_在不知道服务器账号密码的情况下,如何将webshell脚本上传到服务器中
- 8NSSCTF WEB 题解(一)
- 9GIT使用指南_gitfiend
- 10UG NX二次开发(C#)-装配-删除阵列矩阵_ug不能删除组件图样的主组件
FreeRTOS 实时操作系统第二讲 - 启动流程、编码风格与调试方法_freertos启动
赞
踩
一、FreeRTOS 启动流程
RTOS 主要有两种比较流行的启动方式,下面会通过伪代码讲解两种启动方式的区别,然后看看 STM32cubeMX 集成的 FreeRTOS 采用哪种启动方式。
方法一:在 main 函数中将硬件初始化、RTOS 系统初始化,同时创建所有任务,再启动 RTOS 调度器。
伪代码如下:
#include <头文件> #变量定义 int main() { // 硬件初始化 Hardware_Init(); //RTOS 初始化 RTOS_Init(); // 创建任务 1 RTOS_TaskCreate(Task_n); 。。。 // 创建任务 n RTOS_TaskCreate(Task_n); //RTOS 启动,开始任务调度,不再返回 RTOS_Start(); } // 任务函数 1 void Task_1() { // 无限循环,不能返回 for(; ;) { // 任务 1 处理 } } 。。。 // 任务函数 n void Task_n() { // 无限循环,不能返回 for(; ;) { // 任务 n 处理 } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
方法二:在 main 函数中将硬件初始化、RTOS 系统初始化,只创建一个启动任务,再启动 RTOS 调度器。 之后,在启动任务中创建各种应用任务,当所有任务创建完成,启动任务把自己删除。
伪代码如下:
#include <头文件> #变量定义 int main() { // 硬件初始化 Hardware_Init(); //RTOS 初始化 RTOS_Init(); // 创建任务 1 RTOS_TaskCreate(AppTaskCreate); //RTOS 启动,开始任务调度,不再返回 RTOS_Start(); } // 起始任务,在里面创建各种应用任务 void AppTaskCreate() { // 创建任务 1 RTOS_TaskCreate(Task_n); 。。。 // 创建任务 n RTOS_TaskCreate(Task_n); // 创建完应用任务,删除自身,释放内存 RTOS_TaskDelate(AppTaskCreate); } // 任务函数 1 void Task_1() { // 无限循环,不能返回 for(; ;) { // 任务 1 处理 } } 。。。 // 任务函数 n void Task_n() { // 无限循环,不能返回 for(; ;) { // 任务 n 处理 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
STM32cubeMX 集成的 FreeRTOS 如下图,采用的是第一种启动方式。

二、FreeRTOS 编码风格
2.1、数据类型
如下图,FreeRTOS 使用的数据类型虽然都是标准 C 的数据类型,但都进行了重定义,取了个新名字。

需要注意的是,char 数据类型可以通过 keil 指定有符号或者无符号,默认为无符号。

2.2、变量名
在 FreeRTOS 中,定义变量时,把变量的类型作为前缀,方便用户通过变量即可知道变量的类型。
char 变量的前缀是 c,short 变量的前缀是 s,long 变量的前缀是 l,其它比如结构体、任务句柄等是 x; 如果是无符号类型的,前缀再加 u; 如果是指针变量,前缀再加 p。
举例:
char cTemp;
unsigned char ucTemp
unsigned char* pucTemp
2.3、函数名
函数名包含了函数返回值的类型、函数所在的文件名以及函数的功能,如果是私有的函数,还会加 pr 前缀。 这种命名方式方便寻找函数定义并了解函数作用,值得借鉴。
举例:
xTaskCreate() 函数的返回值为任务句柄,在 Task.c 中定义,作用是创建任务;
vTaskPrioritySet() 函数的返回值为 void,在 Task.c 中定义,作用是设置优先级;
2.4、宏
在 FreeRTOS 中,宏用大写字母表示,并配有小写字母作为前缀, 前缀用于指示该宏在哪个头文件定义。
举例:
portMAX_DELAY, 位于 portable.h;
configUSE_PREEMPTION, 位于 FreeRTOSConfig.h
此外,有几个通用的宏定义贯穿 FreeRTOS 的整个代码,都是表示 0 与 1 的宏,如下:
pdTRUE 1
pdFALSE 0
pdPASS 1
pdFAIL 0
三、FreeRTOS 调试方法
本节为大家介绍 FreeRTOS 的调试方法,主要是获取任务的执行情况,通过串口打印出来,方便后续的系统配置与优化工程,非常实用。
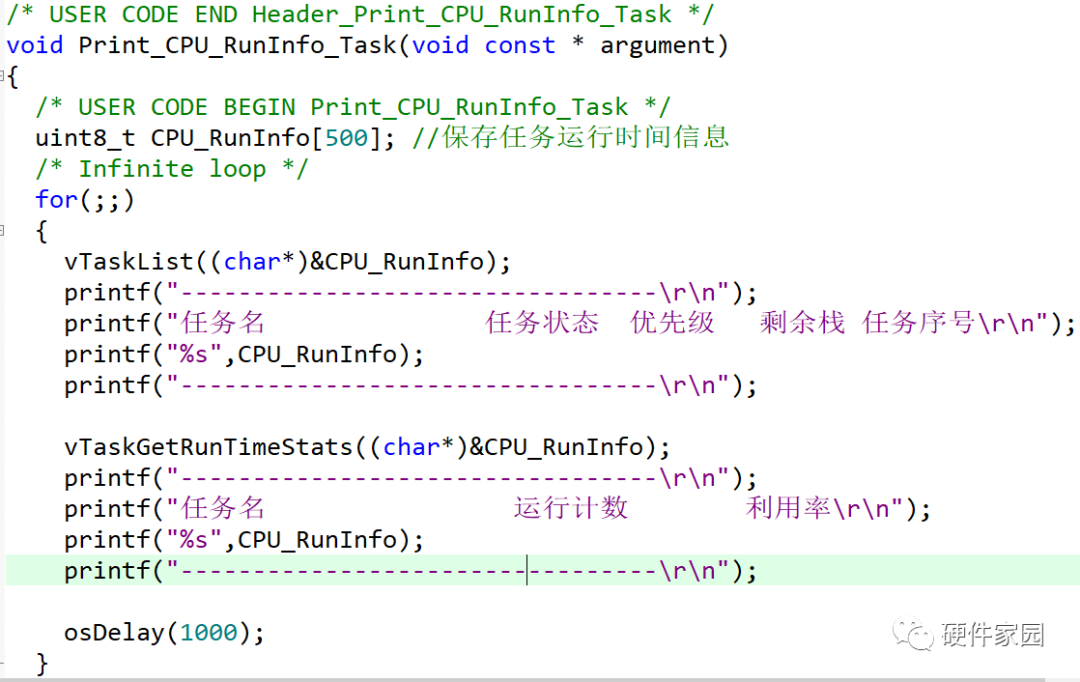
3.1、串口打印调试说明
为了了解任务的运行状态、任务栈的使用情况以及各个任务的 CPU 使用率,需要用到官方提供的两个函数 vTaskList 和 vTaskGetRunTimeStats。
用户可以通过这两个函数获得任务信息,然后通过串口将其打印出来,当然,也可以通过任何其它方式将其显示出来。后续课程统一采用串口打印的方式显示任务信息。
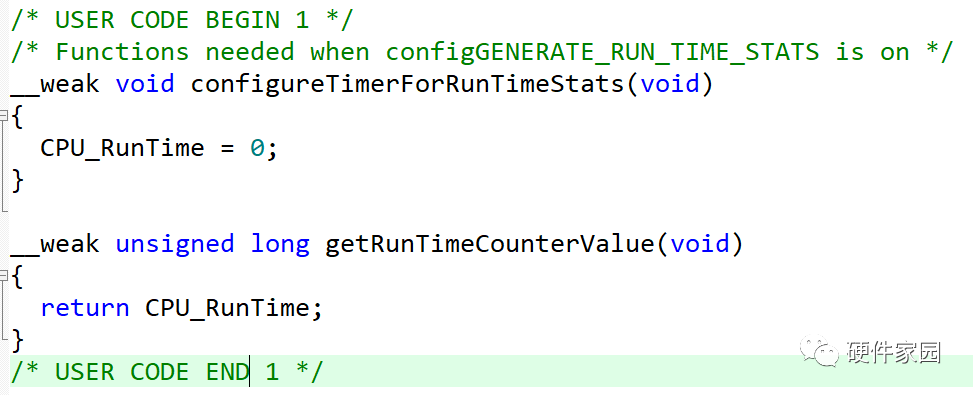
3.2、定时器
为了获取 FreeRTOS 的任务信息,需要创建一个定时器,这个定时器的时间基准精度要高于系统时钟节拍,达到系统时钟节拍的 10 ~ 20 倍,这样得到的任务信息才准确。
Note:
① 这种调试方式仅限调试、测试,实际项目中不要使用,因为这种测试方式比较影响系统实时性。
② FreeRTOS 的系统内核没有对计数时间做溢出保护。 比如定时器周期为 50us,最大支持计数时间:2^32 * 50us / 3600s =59.6 分钟。运行时间超过了 59.6 分钟将不准确。
3.3、具体实现
学习 FreeRTOS 操作系统的目的是利用多任务功能更好的管理产品外设,因此调试代码将在 STM32 物联网实战项目 HAL 裸机开发整合代码工程上启用 FreeRTOS 操作系统,因为最后一讲包含了全部外设驱动函数,方便后续的调用。
①、处理工程代码 - 删除裸机框架的代码 (main.c,MyInit.c,callback.c 与 System.c 文件),系统运行指示灯关闭;
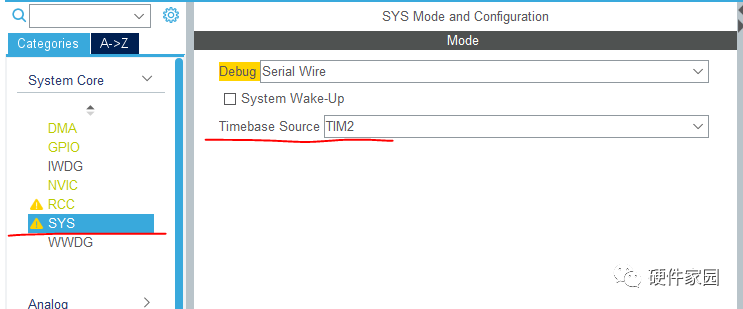
②、STM32CubeMX 配置





③、完善 keil 工程代码